

工业相机的组成和原理
电子说
描述
一.工业CCD的组成:
典型的机器视觉系统可以分为:图像采集部分、图像处理部分和运动控制部分。基于PC的视觉系统具体由如下图所示的几部分组成:
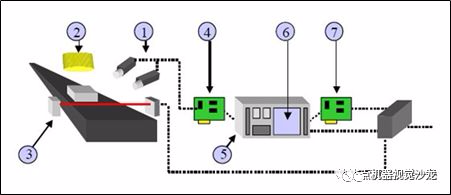
①工业相机与工业镜头——这部分属于成像器件,通常的视觉系统都是由一套或者多套这样的成像系统组成,如果有多路相机,可能由图像卡切换来获取图像数据,也可能由同步控制同时获取多相机通道的数据。根据应用的需要相机可能是输出标准的单色视频(RS-170/CCIR)、复合信号(Y/C)、RGB信号,也可能是非标准的逐行扫描信号、线扫描信号、高分辨率信号等。
②光源——作为辅助成像器件,对成像质量的好坏往往能起到至关重要的作用(有资料认为,光源对成像起到的作用能占到30%+),各种形状的LED灯、高频荧光灯、光纤卤素灯等都容易得到。
③传感器——通常以光纤开关、接近开关等的形式出现,用以判断被测对象的位置和状态(外部触发),告知图像传感器进行正确的采集。
④图像采集卡——通常以插入卡的形式安装在PC中,图像采集卡的主要工作是把相机输出的图像输送给电脑主机。它将来自相机的模拟或数字信号转换成一定格式的图像数据流,同时它可以控制相机的一些参数,比如触发信号,曝光/积分时间,快门速度等。图像采集卡通常有不同的硬件结构以针对不同类型的相机,同时也有不同的总线形式,比如PCI、PCI64、Compact PCI,PC104,ISA等。
⑤PC平台——电脑是一个PC式视觉系统的核心,在这里完成图像数据的处理和绝大部分的控制逻辑,对于检测类型的应用,通常都需要较高频率的CPU,这样可以减少处理的时间。同时,为了减少工业现场电磁、振动、灰尘、温度等的干扰,必须选择工业级的电脑。
⑥视觉处理软件——机器视觉软件用来完成输入的图像数据的处理,然后通过一定的运算得出结果,这个输出的结果可能是PASS/FAIL信号、坐标位置、字符串等。常见的机器视觉软件以C/C++图像库,ActiveX控件,图形式编程环境等形式出现,可以是专用功能的(比如仅仅用于LCD检测,BGA检测,模版对准等),也可以是通用目的的(包括定位、测量、条码/字符识别、斑点检测等)。
⑦控制单元(包含I/O、运动控制、电平转化单元等)——一旦视觉软件完成图像分析(除非仅用于监控),紧接着需要和外部单元进行通信以完成对生产过程的控制(输出OK、NG信号)。简单的控制可以直接利用部分图像采集卡自带的I/O,相对复杂的逻辑/运动控制则必须依靠附加可编程逻辑控制单元/运动控制卡来实现必要的动作。
工业相机原理简述
工业相机其最本质的功能就是将光信号转变成有序的电信号。选择合适的相机也是机器视觉系统设计中的重要环节,相机的选择不仅直接决定所采集到的图像分辨率、图像质量等,同时也与整个系统的运行模式直接相关。
1.相机的芯片类型:
一般情况下,工业相机按照论市场主流芯片类型可以分为CCD相机和CMOS相机,当然也有一些其他的芯片,比如富士公司生产的Super CCD芯片。数码相机的CCD和CMOS都深藏于相机内部,就算有机会看到它们的样子,也很难进行区分。
CCD芯片工作原理,如图所示:
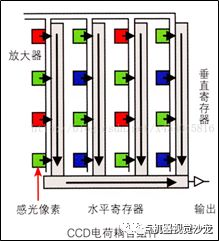
在感光像点接受光照之后,感光元件产生对应的电流,电流大小与光强对应,因此感光元件直接输出的电信号是模拟的。在CCD传感器中,每一个感光元件都不对此作进一步的处理,而是将它直接输出到垂直寄存器,传到水平寄存器中,最后才能形成统一的输出。由于感光元件生成的电信号实在太微弱了加上在此过程中会产生大量电压损耗,无法直接进行模数转换工作,因此这些输出数据必须做统一的放大处理—这项任务是由CCD传感器中的放大器专门负责,经放大器处理之后,每个像点的电信号强度都获得同样幅度的增大;因信号只通过一个放大器进行放大,所以产生的噪点较少。但由于CCD本身无法将模拟信号直接转换为数字信号,因此还需要一个专门的模数转换芯片进行处理,最终以二进制数字图像矩阵的形式输出给专门的DSP处理芯片。
CMOS工作原理,如图所示:
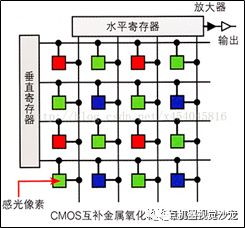
对于CMOS传感器,上述工作流程就完全不适用了。CMOS传感器中每一个感光元件都直接整合了放大器和模数转换逻辑,当感光二极管接受光照、产生模拟的电信号之后,电信号首先被该感光元件中的放大器放大,然后直接转换成对应的数字信号。换句话说,在CMOS传感器中,每一个感光元件都可产生最终的数字输出,所得数字信号合并之后被直接送交DSP芯片处理,问题恰恰是发生在这里,CMOS感光元件中的放大器属于模拟器件,无法保证每个像点的放大率都保持严格一致,致使放大后的图像数据无法代表拍摄物体的原貌—体现在最终的输出结果上,就是图像中出现大量的噪声,品质明显低于CCD传感器,不过目前这方面的技术已大幅改善。
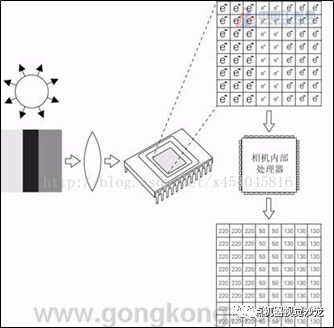
二. 黑白相机成像原理:
以CCD原理为例,CCD原理并不复杂。我们可以把它想象成一个顶部被打开的记忆芯片。因此光束可以射到记忆单元中。根据"光电效应”,这些光束在记忆单元中产生负电荷(下图中右上部分)
三. 彩色彩色成像原理:
CCD芯片将光子转换为电子,在这一过程当中,光子数目与电子数目互成比例。但光子还有另外一个特征值——波长(波长决定颜色),而这条信息却没有在这个过程中被转换为电子。因此,从这个意义上说,CCD芯片都可以被称为色盲。所以彩色相机的成像稍微复杂些,目前主要有两种方式:三棱镜方式和滤光片方式,下面分别介绍:
三棱镜方式:
为了获取光线的颜色信息,我们很容易想到用三棱镜将光束分成单色光,然后分别成像,对,三棱镜方式就是这个原理,如下图:
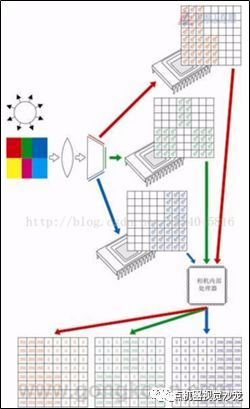
它将从镜头射入的光分成三束,每束光都由不同的内置光栅来过滤出某一种三原色,然后使用三块CCD分别感光。这些图象再合成出一个高分辨率、色彩精确的图象。如300万像素的相机就是由三块300万像素的CCD来感光。也就是可以做到同点合成,因此拍摄的照片清晰度相当高。该方法的主要困难在于其中包含的数据太多。在你照下一张照片前,必须将存储在相机的缓冲区内的数据清除并存盘。因此这类相机对其他部件的要求非常高,其价格自然也非常昂贵。
其他彩色原理省略。
相机常见参数介绍:
1. 分辨率(Resolution):相机每次采集图像的像素点数(Pixels),对于工业数字相机一般是直接与光电传感器的像元数对应的,对于工业数字模拟相机则是取决于视频制式,PAL制为768*576,NTSC制为640*480。
2. 像素深度(Pixel Depth):即每像素数据的位数,一般常用的是8Bit(2^8),对于工业数字数字相机一般还会有10Bit、12Bit等。
3. 最大帧率(Frame Rate)/行频(Line Rate):相机采集传输图像的速率,对于面阵相机一般为每秒采集的帧数(Frames/Sec.),对于线阵相机机为每秒采集的行数(Hz)。
4. 曝光方式(Exposure)和快门速度(Shutter):对于工业线阵相机都是逐行曝光的方式,可以选择固定行频和外触发同步的采集方式,曝光时间可以与行周期一致,也可以设定一个固定的时间;面阵相机有帧曝光、场曝光和滚动行曝光等几种常见方式,工业数字相机一般都提供外触发采图的功能。快门速度一般可到10微秒,高速相机还可以更快。
5. 像元尺寸(Pixel Size):像元大小和像元数(分辨率)共同决定了相机靶面的大小。目前工业数字相机像元尺寸一般为3μm-10μm,一般像元尺寸越小,制造难度越大,图像质量也越不容易提高。
6. 光谱响应特性(Spectral Range):是指该像元传感器对不同光波的敏感特性,一般响应范围是350nm-1000nm,一些相机在靶面前加了一个滤镜,滤除红外光线,如果系统需要对红外感光时可去掉该滤镜。
-
工业相机选型教程2# 工业相机# 工业相机选型#志强视觉科技 2023-09-22
-
工业相机选型教程1# 工业相机#工业相机选型 #机器视觉志强视觉科技 2023-09-22
-
工业相机镜头常用参数选型教程4 #工业相机选型 #工业镜头选型 #机器视觉检测志强视觉科技 2023-10-13
-
Ladybug 360°成像 全景公寓#工业相机志强视觉科技 2023-11-13
-
机器视觉中工业相机与民用相机的区别志强视觉科技 2023-12-05
-
工业相机是如何水冷散热的2018-11-27 0
-
【求购】基恩士工业相机/康耐视工业相机/CCD工业相机等等工业镜头2020-07-10 0
-
工业相机相关知识2021-07-26 0
-
回收AVT工业相机,basler工业相机,sony工业相机2021-10-19 0
-
工业相机之相机分类,多种相机的对比2020-03-16 4880
-
工业相机和普通相机的区别2020-06-09 5462
-
如何选择合适的工业相机,工业相机的优势2020-06-19 1900
-
图像采集卡和工业相机有什么区别2020-12-24 895
-
工业相机组成 工业相机选型2023-03-28 4003
-
工业相机的组成和原理 黑白相机成像原理2023-06-21 1292
全部0条评论

快来发表一下你的评论吧 !
