

一文入门AUTOSAR OS
电子说
描述
Autosar Os overview
Autosar Os 在Autosar 框架中上至RTE 下至驱动,中间可以和BSW 基础模块进行交互。是整个autosar 框架下最重要的组成部分。
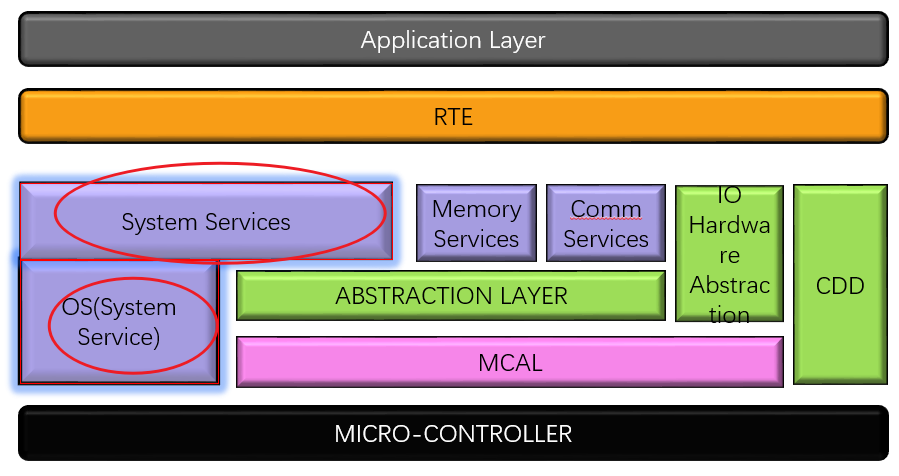
其中Syser Services 为一些系统服务,不属于操作系统。下文仅对 Os 进行描述
OS 与 BSW 各模块关系
虽然说OS 是整个框架的灵魂,但是也有极少数的BSW 模块不与OS 直接交互。换句话说,其他BSW 模块在改动的时候,是需要考虑一下OS 对其的影响,和它对OS 的影响。
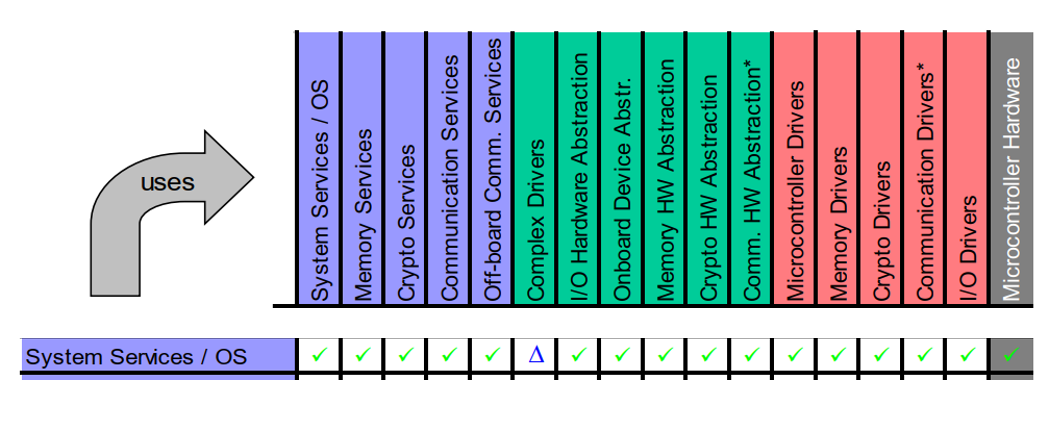
这里可以看到除了cdd 都是无限制的与os交互。只有cdd 是有限制的和os 进行交互。
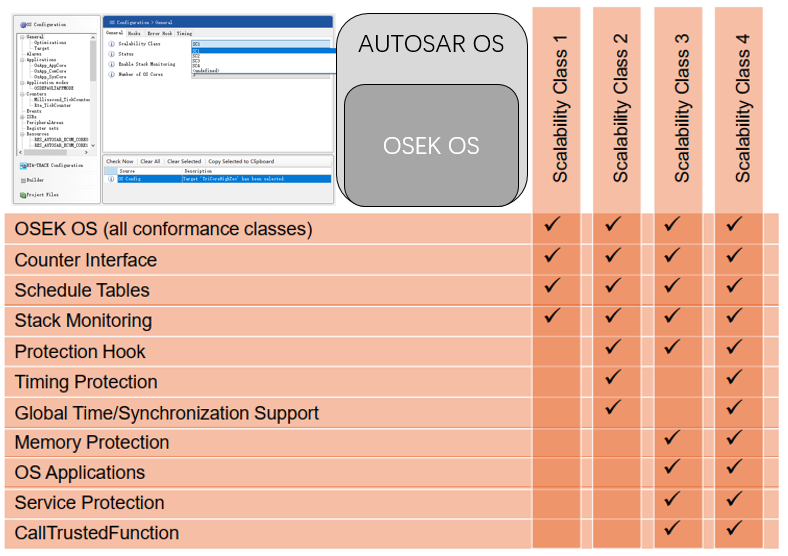
OS 的类别与其功能
AUTOSAR OS 和 OSEK OS 都是为汽车领域而开发的实时操作系统。虽然它们都致力于提供实时性能、可靠性和稳定性,但其设计理念和实现方式有所不同。AUTOSAR OS 旨在提供更高级的软件体系结构和更多的配置选项,以支持更复杂的汽车软件系统;而 OSEK OS 更加简单和轻量级,适用于较小规模的汽车电子系统。两者可以共存,也可以相互补充,以满足不同汽车应用的需求。
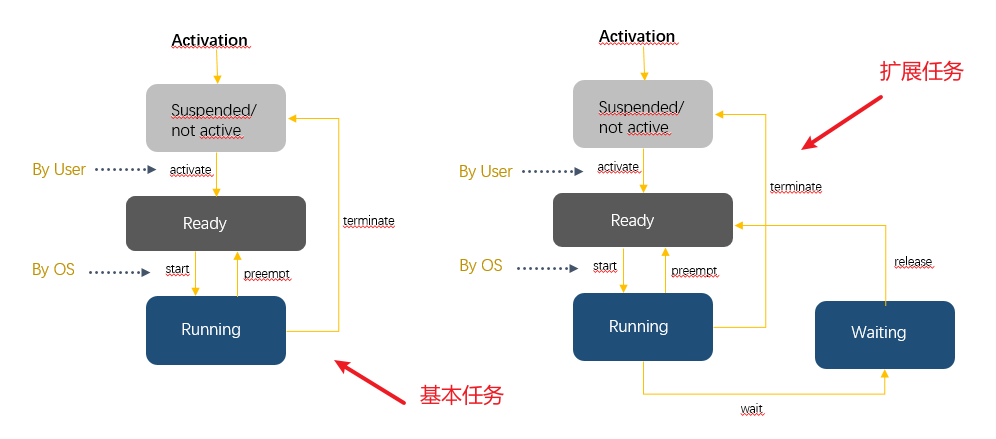
TASK
OS 的task 分为两种。
-- 基本任务
-- 扩展任务
其主要的区别就是有无waiting状态。这里先表示一下基本状态,下面对其使用栈详细描述可以按需在实际架构中设计,使用。
TASK - 抢占机制
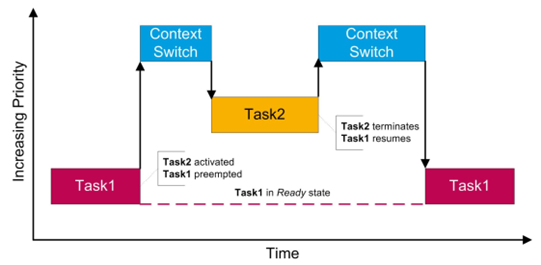
01非抢占
这里可以看出,当任务被设定为非抢占的时候,当任务没有完成时,即使高优先级的任务到来,也无法将其抢占。
一般情况下我们可以把初始化的任务,以及一些模式切换时候,必须进行的一些操作,这类任务设计成非抢占的任务。
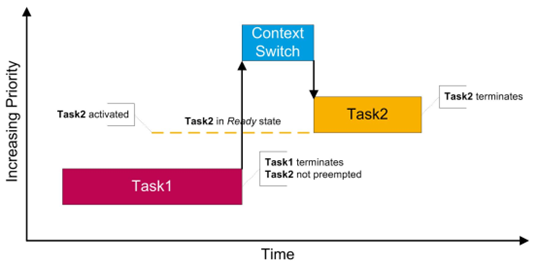
02抢占
为了更好的利用OS 来压榨硬件资源,大部分的任务都会被设计成抢占式任务。一般的原则,重要的任务优先级高,需要运行时间较短的任务优先级高。
03合作
这里就很灵活,但是需要在代码过程中设计好什么时候让出CPU。但是处理得好的话,会拖慢CPU, 无法最大限度的压榨硬件,高优先级的任务被耽误。
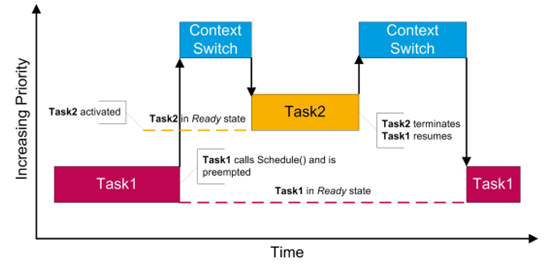
#includeTASK(Cooperative) {Function1(); Schedule();/* Allow preemption */ Function2(); Schedule();/* Allow preemption */ Function3(); Schedule();/* Allow preemption */ Function4(); TerminateTask(); }
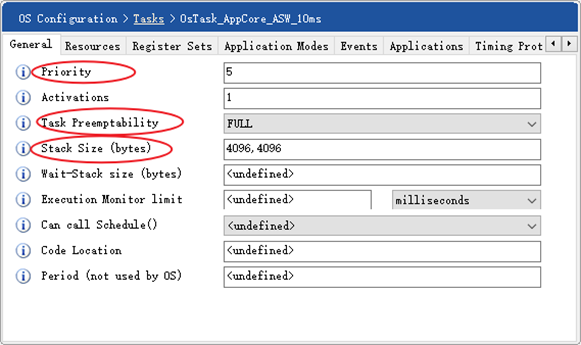
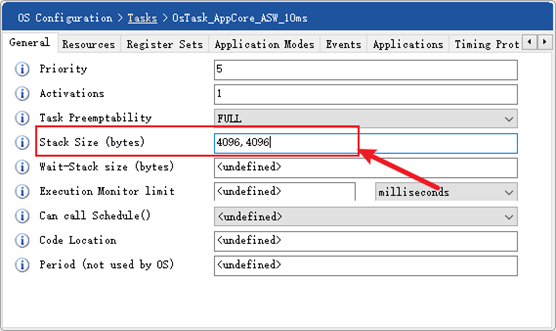
任务在配置过程中最重要的下面几个参数,需要注意。这里尤其要注意使用栈的大小。因为这个真的有可能会让软件运行奔溃。其他的参数最多是运行不正常。
TASK - 栈的使用
Autosar os的栈使用是单一栈策略。假设定义了32k的栈。那么所有的task都使用这一个大的栈空间。那就是说,当有任务抢占的时候,栈是叠加使用的。下面是
抢占时候使用的栈情况。
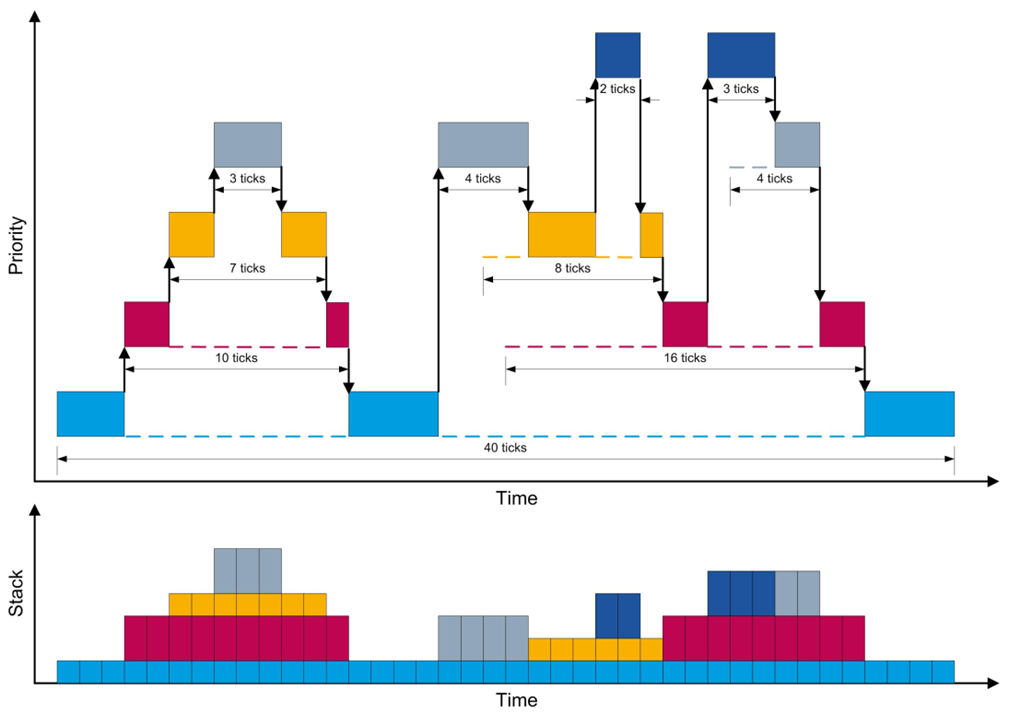
这里可以看出来,当有高优先级的任务运行的时候,栈的使用空间是一直增大的。这时候就需要注意上面定义的32k 够不够用了。因为他们所有的task公用一个栈。
下面是非抢占时候使用栈的情况。
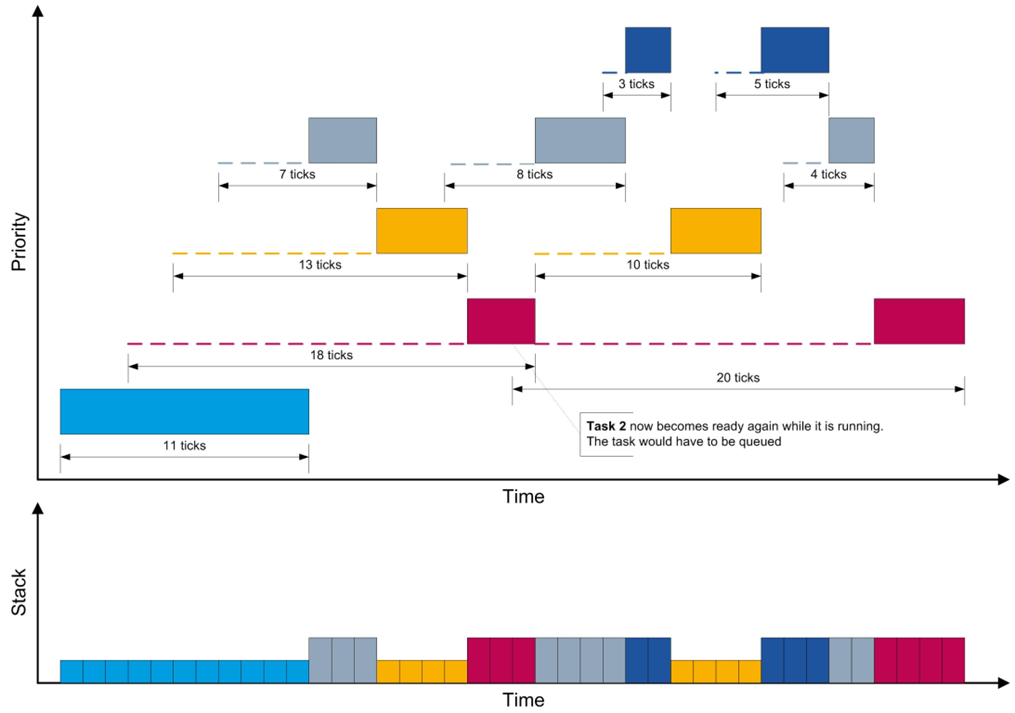
这里就相对简单多了,栈的使用就是和当前运行的task所需要的栈的情况是一样的。
前面说到扩展任务的情况呢。
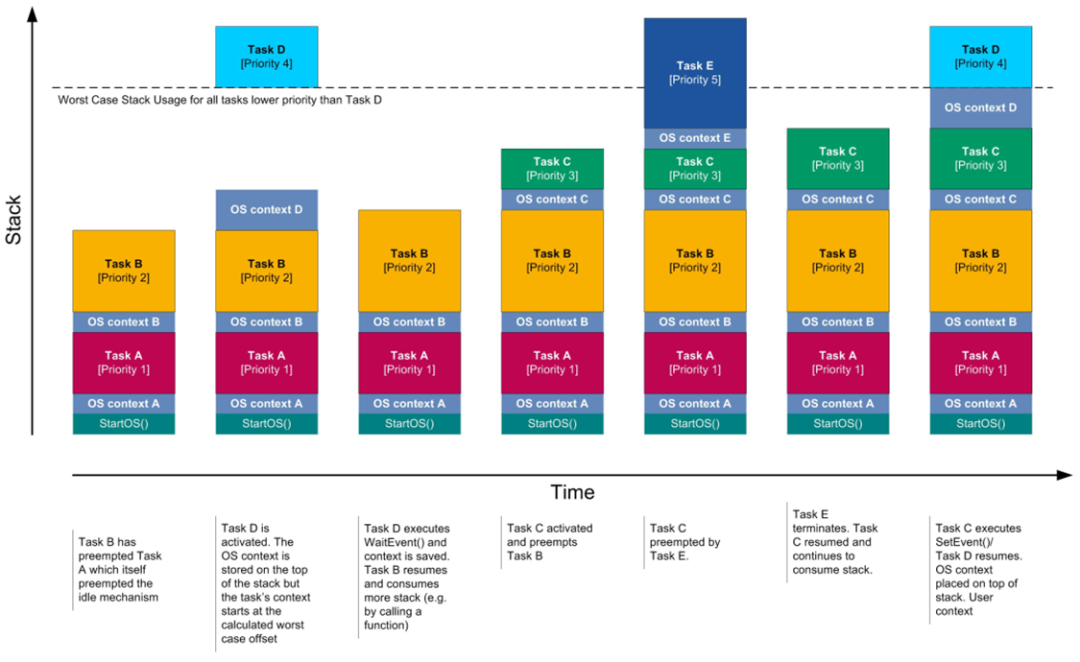
这里操作系统会根据静态配置的任务使用的栈,进行预留。换句话说就是配置完扩展任务后,os 根据优先级比扩展任务优先级高的任务使用栈的最大总和,预留一下。把扩展任务的栈至于栈底 + 最大使用量。当扩展任务到running状态后,直接就在规定的栈地方运行。所以这里很考验前面的所有task的栈,如果是使用超了,这时候程序必然就崩了。
中断
Interrupt
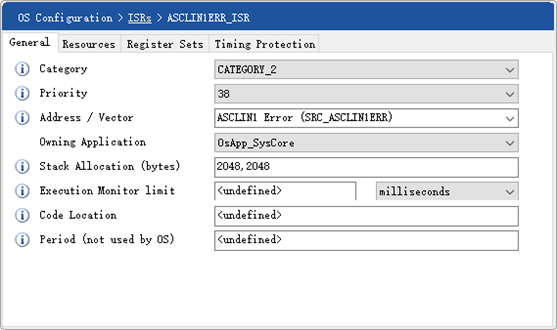
Category 1
•Os 无法给一类中断提供服务
•一类中断不与Os交互
•一类中断优先级高于Os 以及所有的二类中断
•可以通过Os 接口对一类中断进行enable/disable
Category 2
•二类中断受到Os管控
•硬件中断向量指向Os内部
•有限制使用os 接口不允许 TerminateTask, WaitEvent, ClearEvent, Schedule, ChainTask
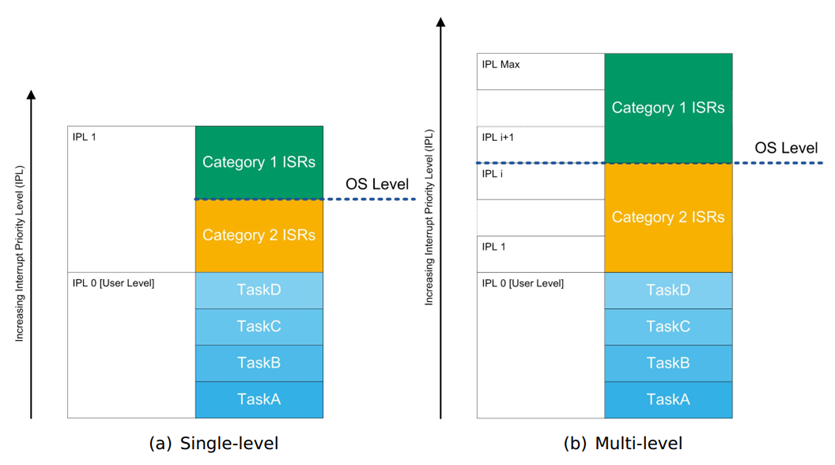
下图可以看出来一类中断时独立于os的,高于os的。根据不同的芯片是不同的,有的芯片的中断优先级是组类别,有的是独立的。也就是说中断是否可以嵌套。
下面是当二类中断发生,这时候我们的os将会怎么处理呢。
当硬件终端触发,并且ICU模块处理完成之后,到达了OS 。这时候OS 根据静态配置进行操作,对上下文进行切换与保存现场。
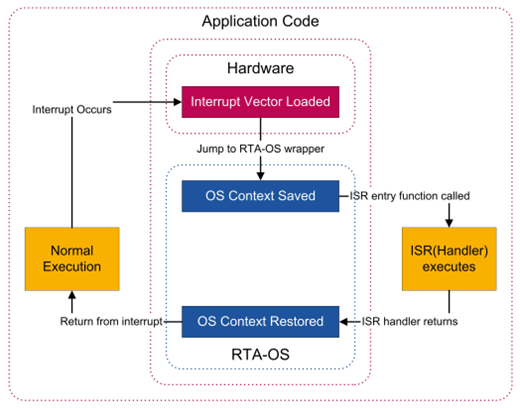
在配置过程中很简单,但是对于实际的操作我们需要注意优先级,一般情况我们都会使用二类中断。这样会减少os的影响。减少系统的不可控性。
如何有效率的使用中断。
#includeISR(InefficientHandler) { /* Long handler code. */ } #include ISR(EfficientHandler) { ActivateTask(Task1); } TASK(Task1) { /* Long handler code. */ TerminateTask(); } #include ISR(Interrupt1) { /* Dismiss the interrupt where required */ /* Rest of the handler */ }
异步处理,不将中断的回调一直处理完。而是激活一个task,进行处理,当然这也是要根据实际场景进行设计。
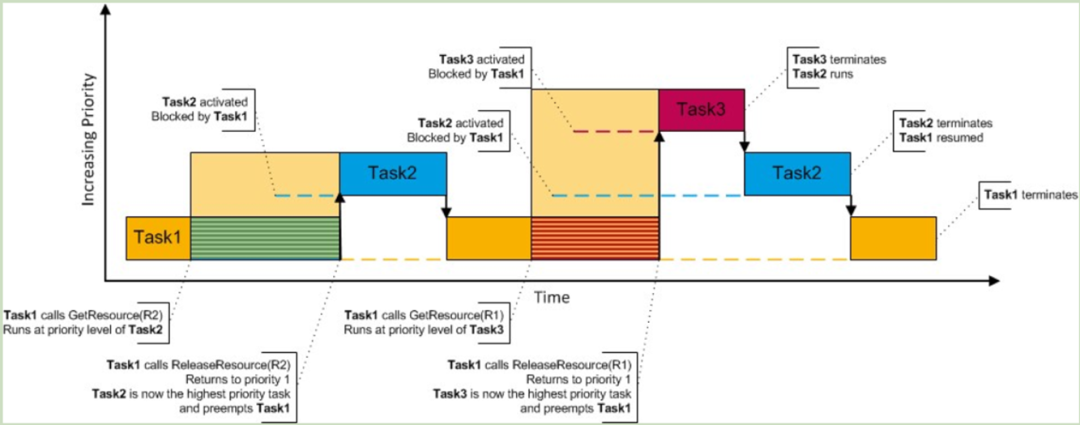
resource
Resource 基础介绍
•Standard resource 标准的二进制状态
•Linked resource 可以嵌套的二进制状态
•Internal resource 以任务为基础的二进制状态
Standard resource 标准的二进制状态 具体使用
#includeTASK(Task1) { ... GetResource(Resource1); /* Critical section. */ ReleaseResource(Resource1); ... TerminateTask(); }
代码片段:可切换语言,无法单独设置文字格式
可以看出这类是最简单的,一个get 一个 release. 中间的 就是会被锁住的资源。其他地方无法进行访问。需要这个release之后才可以。
Linked resource 可以嵌套的二进制状态
#includeGetResource(Resource1); GetResource(Resource2); GetResource(Resource3); ReleaseResource(Resource3); ReleaseResource(Resource2); ReleaseResource(Resource1); }
代码片段:可切换语言,无法单独设置文字格式
和上面很相似,不过必须是一个对应一个。一个解开一个。
举个例子错误使用
#includeTASK(Write){ /* Highest priority .*/ WriteBuffer(); GetResource(Guard); BufferNotEmpty = True; ReleaseResource(Guard); ChainTask(Read); } TASK(Read){ /* Lowest priority. */ ReadBuffer(); GetResource(Guard); if( BufferNotEmpty ) { ReleaseResource(Guard); ChainTask(Read); } else { ReleaseResource(Guard); TerminateTask(); } }
tips: 任务结束前,没有release.
Schedule table
区别于rtos, 这里有调度表,属于静态配置的调度器。可以说是一系列的event的组合。
下面也给了schedule table 和 event的对比。用起来相当的方便。
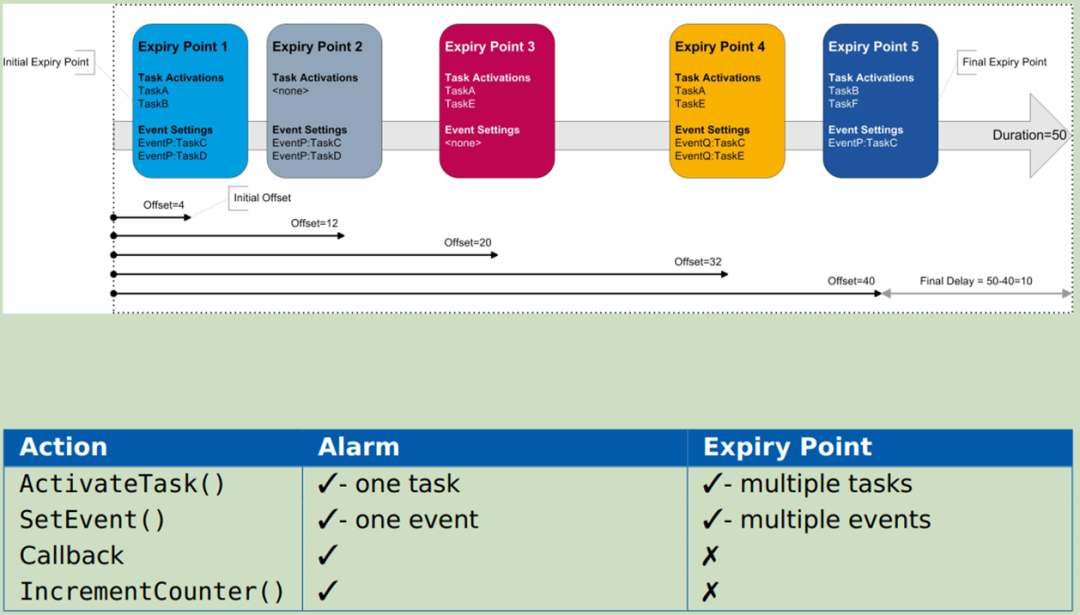
这里简单介绍两个schedule table 的api
•Start absolute point
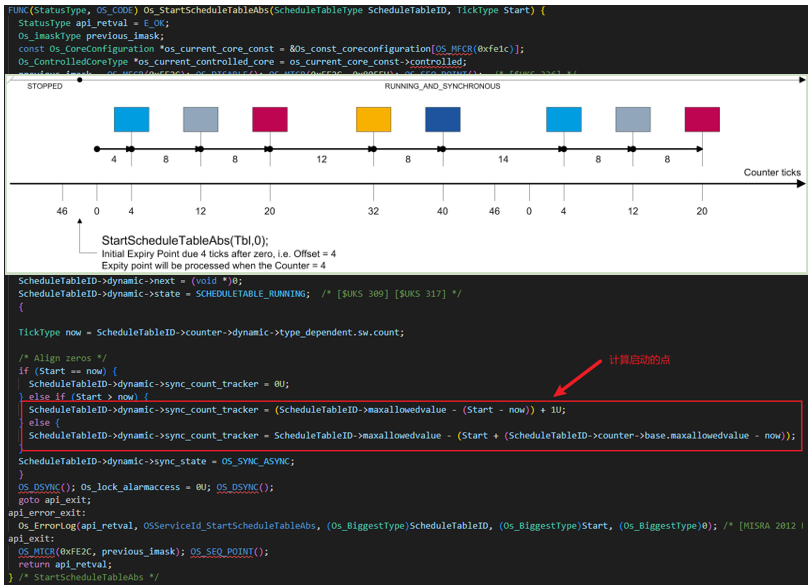
•Start relative point
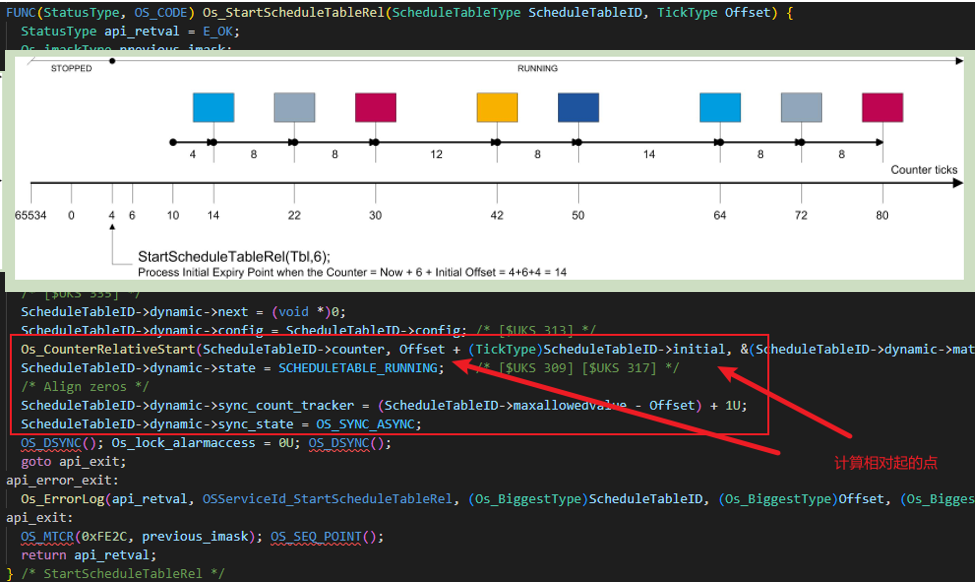
一般情况下我们系统里只需要一条schedule table即可。所以这些api 在外部用的也很少。这里只需要直到,如果当架构设计需要多条schedule table的时候,我们可以通过一系列条件,手动的调度起来。让这上面的point 内部的task 以此运行。
配置
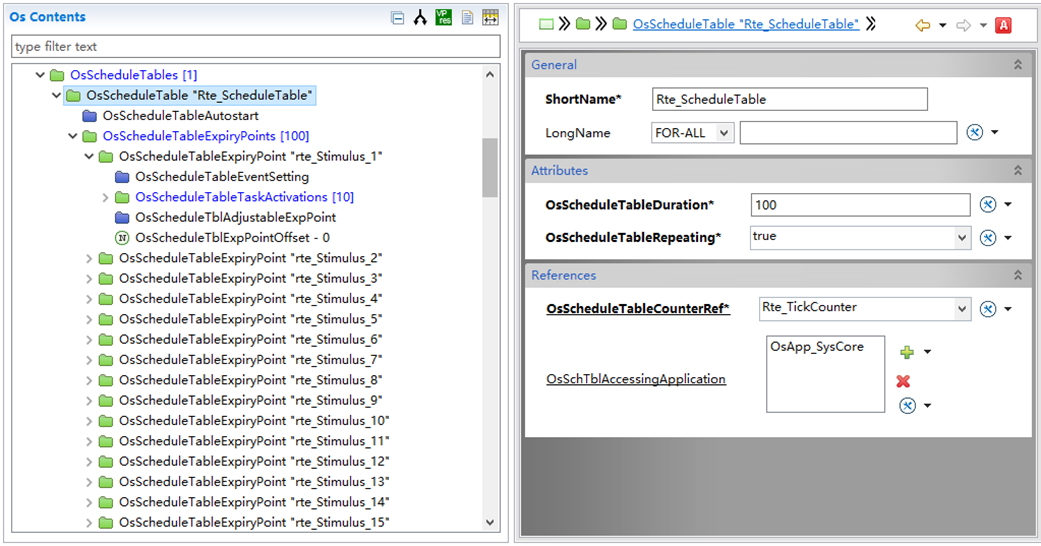
配置也相对比较简单。也基本不需要配置,因为在左外SWC 设计,完成RTE 的配置之后。这个table的属性就已经被定义好了。只是通过OS 将其生成代码。
stack monitor 栈监控
最上面提到task的一个配置参数,栈的使用。
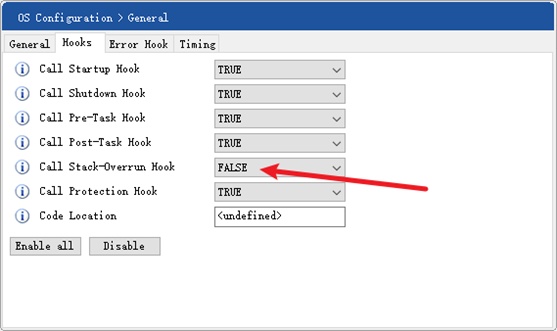
这里面就是可以激活OS 对栈使用的监控。os将会自动monitor
下面截取一段代码,解释了一下os如何获取栈的使用情况。在使用过程中,我们用户可以利用这个api进行一些自己的monitor.
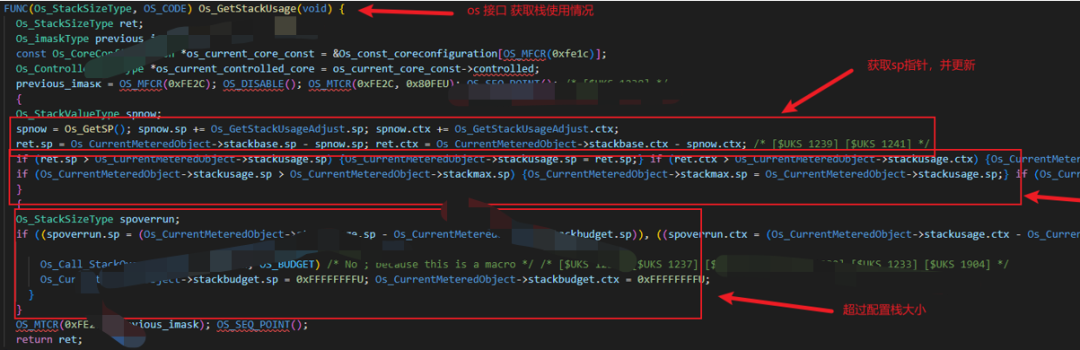
当然实现方式千千万,我们还是要了解一下实际的原理。
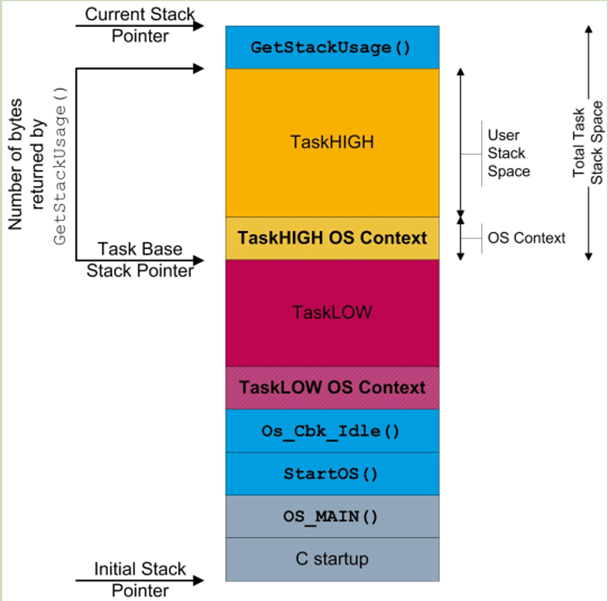
下图可以看出来。不同地方调用 GetStackUsage结果可能是不同的。
所以一般来说,我们可以选择高优先级的任务进行执行该api. 进而获取
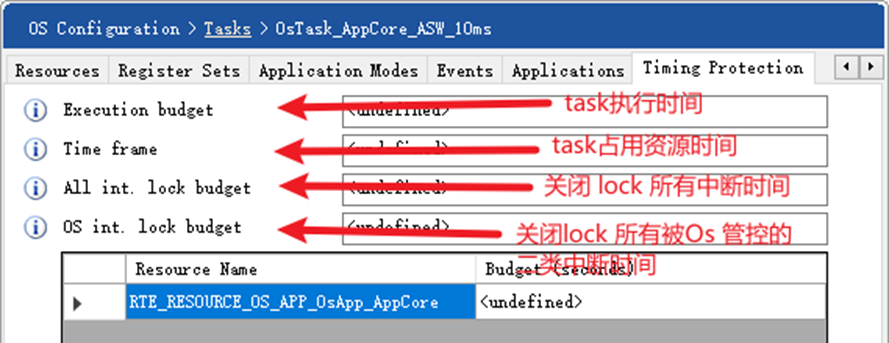
time protection 时间保护
对于时间保护我们一般采类似于下面的时间约束。
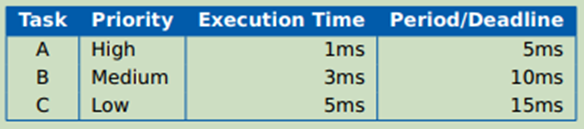
这是什么意思呢。
1ms的任务 如果在5ms内 没有被执行完,则认为有问题。
3ms的任务 如果在10ms内没有被执行完,则认为有问题。
5ms的任务 如果在15ms内没有被执行完,则认为有问题。
下面有个例子。
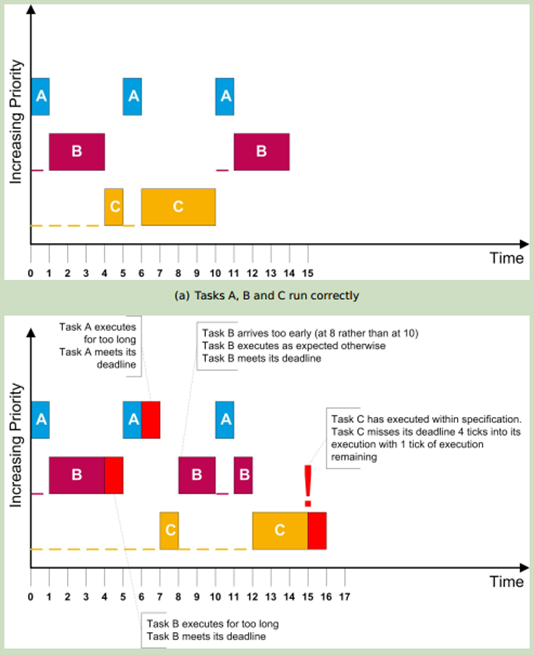
看似是C 没有执行完。确实os 报错 应该报的是C 任务没有规定时间内完成。
但是原因缺失上面的A 和 B。所以实际情况,还是需要根据调度关系进行分析。问题不一定处在报错的任务。
关于配置方面也很简单。
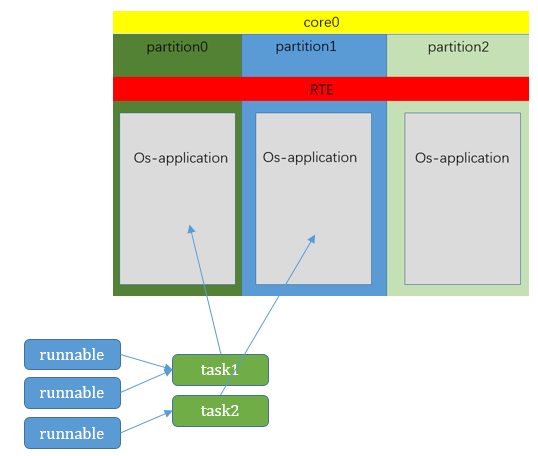
memory protection 内存保护
内存保护的机制通过os-application 的 trust 和 non-trust 进行隔离开。
对读写的限制,对运行的隔离。
当其中一个os-application 发生故障,可以独立的关闭其中一个os-application ,其他的os-application 不受影响。
对外设的访问,对内存特殊区域的访问的约束。可以通过trust non-trust 来约束。
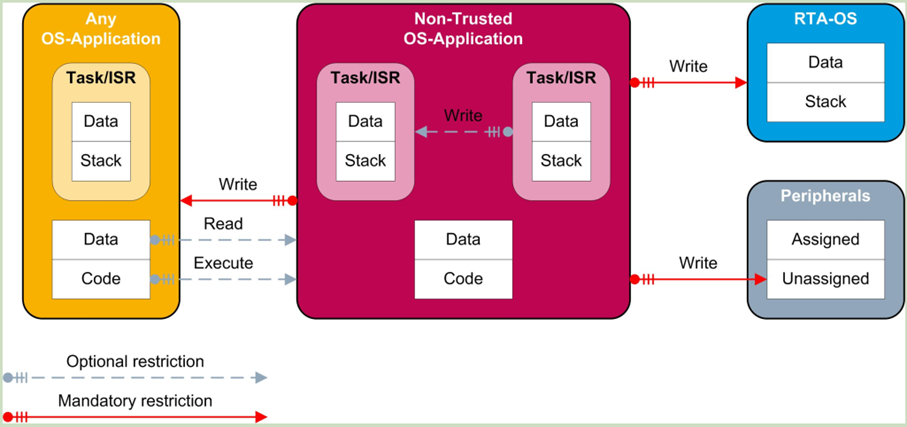
这样可以一定程度上减少 让os崩溃的可能发生
审核编辑:汤梓红
-
TC397如何同时运行CP Autosar OS和FreeRTOS?2024-01-24 0
-
TC387配置Autosar OS后主核跑飞了怎么解决?2024-03-06 0
-
AUTOSAR的工作原理是什么?为什么需要AUTOSAR?2021-05-17 0
-
AUTOSAR是什么2021-11-10 0
-
为什么使用AUTOSAR呢2021-12-09 0
-
CP AUTOSAR EcuM的相关资料下载2022-02-11 0
-
介绍AUTOSAR支持的四种功能安全机制2022-06-10 0
-
AUTOSAR功能安全机制之内存分区与实现2022-09-19 0
-
可以在S32DS的S32K144-Q100板上运行的AUTOSAR OS演示程序在哪里?2023-03-27 0
-
“E:\NXP\AUTOSAR\S32K_AUTOSAR_OS_4_0_98_RTM_1_0_0sample\standard\sc1”编译时无法生成sample1_cfg.o怎么解决?2023-04-06 0
-
LLCE driver是否可以在非autosar os中运行?2023-04-18 0
-
AUTOSAR入门2021-11-05 637
-
搞一下CP AUTOSAR 入门 | 04 CP AUTOSAR EcuM 详解2021-12-07 814
-
如何在AUTOSAR OS系统运行时使用事件Event呢?2023-05-22 1497
-
AUTOSAR OS操作系统功能特性2023-10-27 1271
全部0条评论

快来发表一下你的评论吧 !
