
资料下载


轻松拾取无需触摸的开源项目
杜云
分享资料个
描述
动机
我们的第一响应者在 COVID-19 大流行期间所做的出色工作令人惊叹,我们要感谢他们的奉献精神,以及他们的健康和生命危险。
他们必须每天处理生物危害材料并运送来自美国和世界不同地区的医疗用品。我们认为这个项目可以作为小型/手动/移动式气泵夹具的概念验证,适用于小型轻型包装(最大 3 磅)。
同样,邮政服务和包裹递送公司可以通过允许他们的处理人员移动小包裹而不使自己暴露于包裹中的病毒而受益。
真空吸盘吸盘易于更换或拆卸,便于卫生,并且通过设计功能特定的板可以轻松降低制造成本。
材料
我们在这个项目中使用了 Adafruit 羽毛板,因为它能够使用快速原型制作附加板开箱即用地连接。
该系统使用四个真空吸盘吸盘和弯头配件组,以更好地抓握表面。
来自 Sparkfun 的两个具有成本效益的 12V 气泵和 7.2V 锂聚合物电池。
这次,Lowes 发挥了重要的材料来源,获得了乙烯基管、快速连接器和亚克力板。
而且,为了将气泵固定在亚克力板上,我们必须设计 3D 打印支架。

真空吸盘吸盘连接
首先,我们在亚克力板上钻孔,以使真空夹具弯头配件连接到底座上。钻孔的距离和位置取决于您希望系统抓取的对象类型。我们想移动矩形光滑形状的物体,如包裹箱或生物危害一次性小容器。我们使用四个夹具,两个在底座的相对两侧对齐在一个矩形形状上,如果您计划抓取的物体的重量主要分布在这些形状上,您可以尝试三角形或线性设计。

在板材的每一侧使用一个垫圈,然后用提供的螺母固定接头,如下所示:
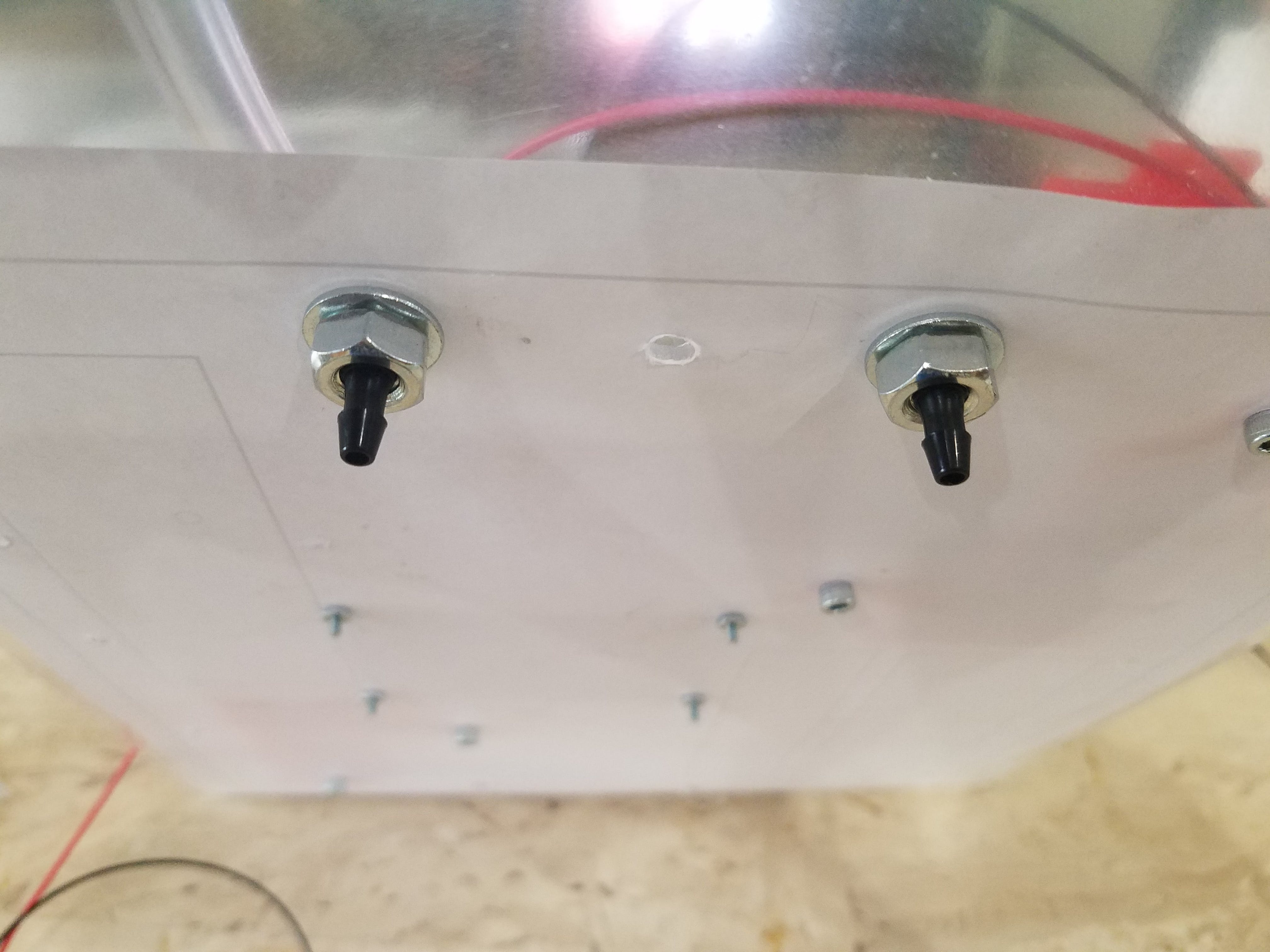
将吸盘插入配件中,确保吸盘与配件的尖端齐平,以获得最大的吸力。

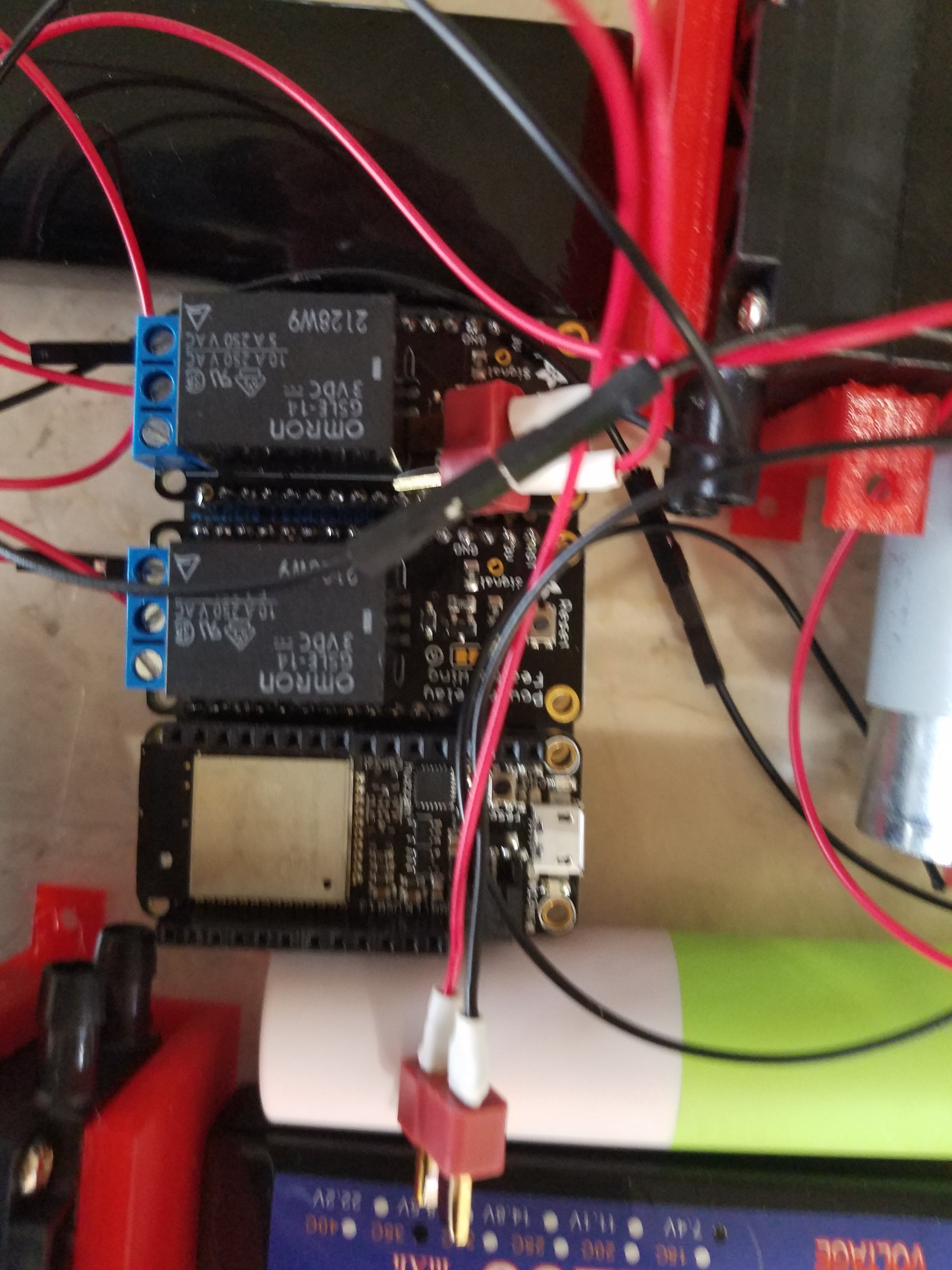
功率继电器设置
用于该系统的电子设备不需要先进或快速的微处理器,而是能够使用数字信号打开/关闭继电器。
Adafruit Featherwing 三联器连接两个电源继电器板,根据Adafruit 引脚分配指南,我们焊接关闭映射到 Feather M4 Express 的相应引脚 11 和 12。请注意,如果您使用 Feather HUZZAH32,则引脚会在空气配置上更改为 12 和 27。Feather 电源继电器板允许您选择多达 11 个不同的引脚。
打开/关闭继电器的代码是对相应引脚的简单数字写入。
//Turn off the relays
digitalWrite(ledPin, LOW);
digitalWrite(ledPin2, LOW);
//For 2.5 seconds
delay(2500);
//Turn on the relays
digitalWrite(ledPin, HIGH);
digitalWrite(ledPin2, HIGH);
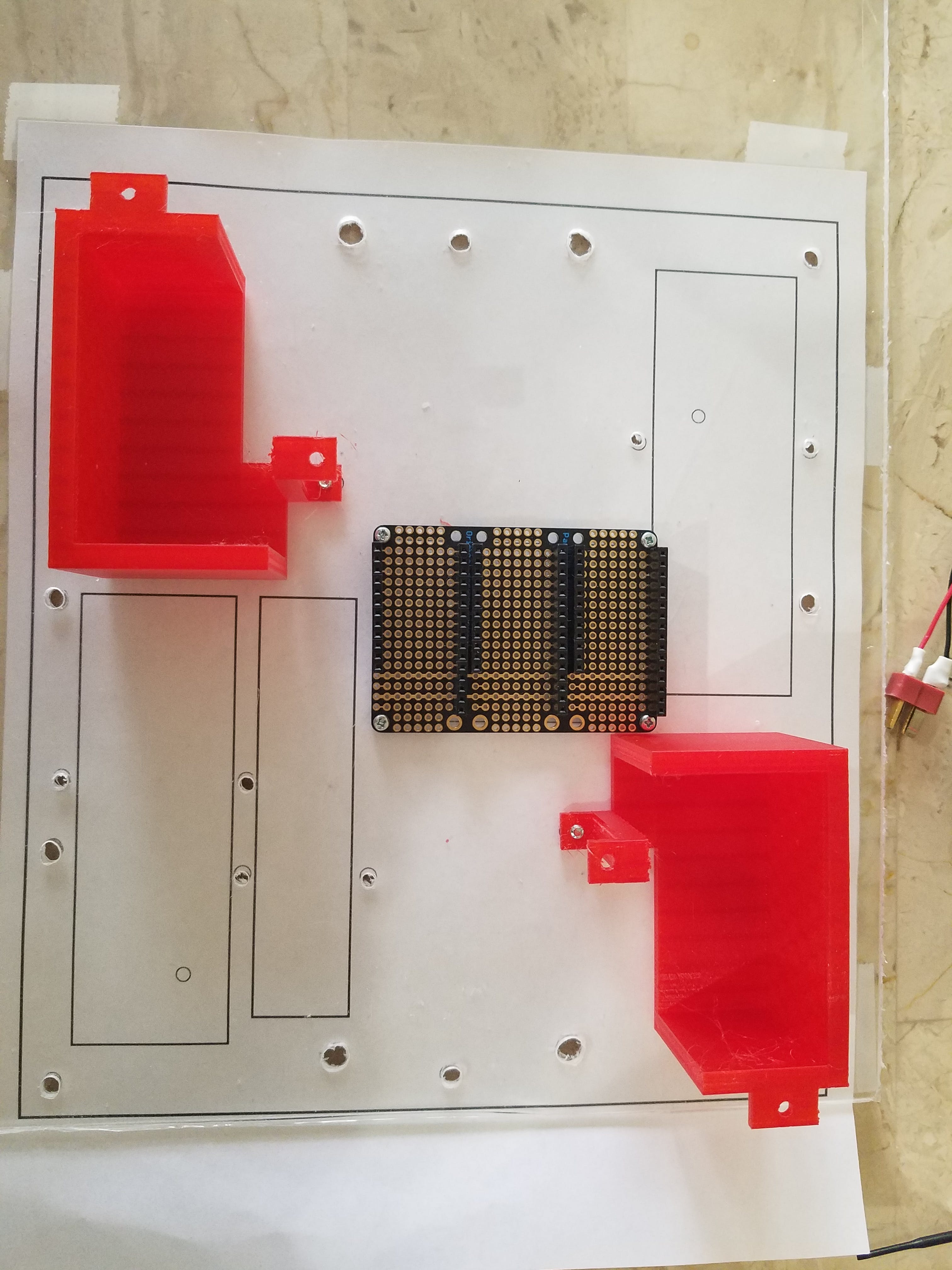
系统构建
本节逐步展示如何将 Pickup with easy 系统组合在一起。
使用螺钉将 3D 打印泵架固定到底座上。

对两个 3D 打印泵架重复该过程。在预钻孔中连接 Featheriwing 三联板。
将 12V 气泵滑入支架内。支架通过紧密配合固定泵。如果感觉松动,您可以使用橡皮筋。
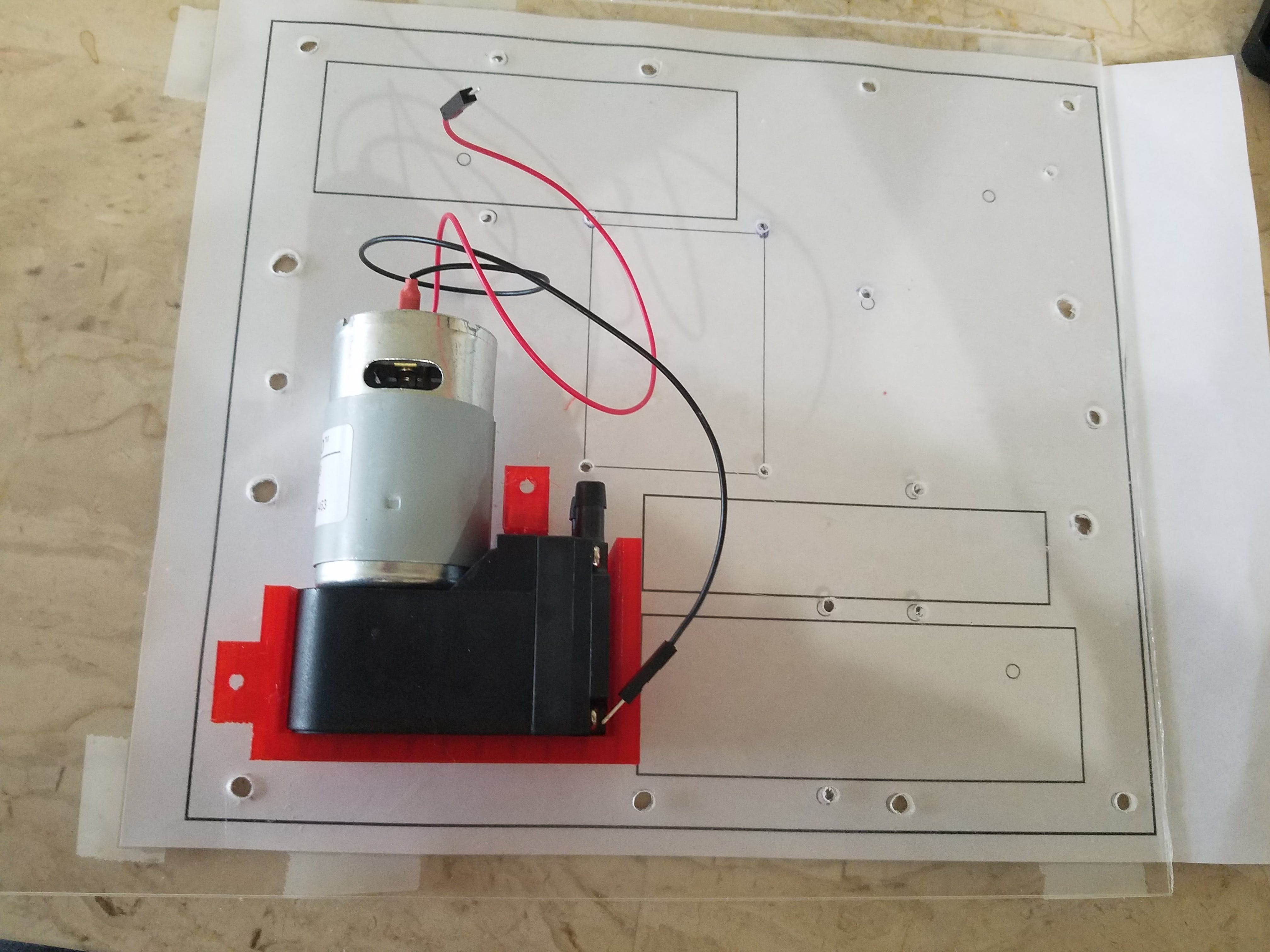
使用垫片两侧的垫圈将真空夹具弯头接头插入相应的开口,然后用提供的螺母固定接头。
将 1/4 管道部分连接到 1/4 至 3/8 适配器(对另一个气泵重复此操作)
连接一个快速连接分离器,因为我们需要将两个吸盘连接到一个气泵上。
将每个分离器输出连接到真空夹具弯头接头。
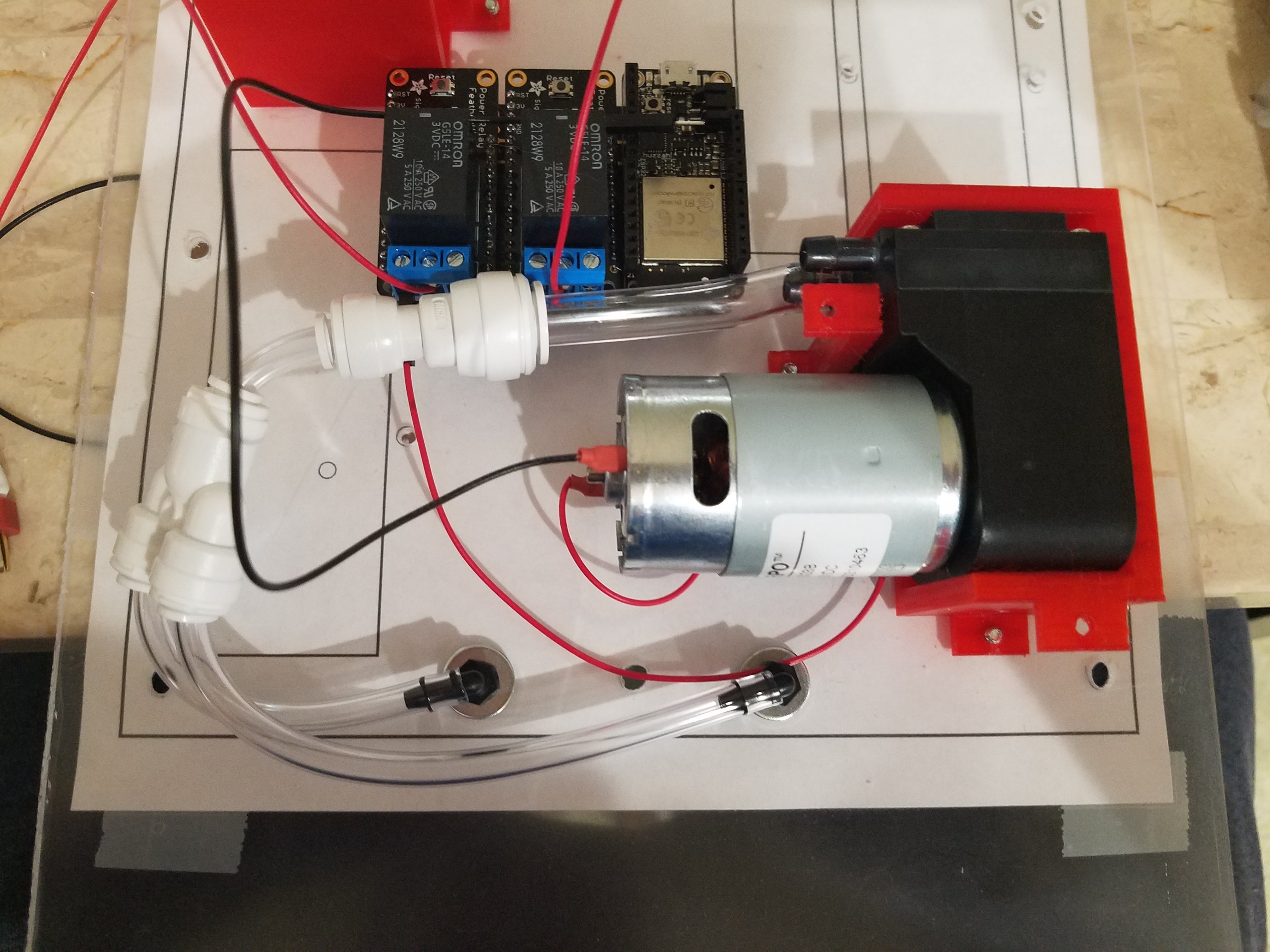
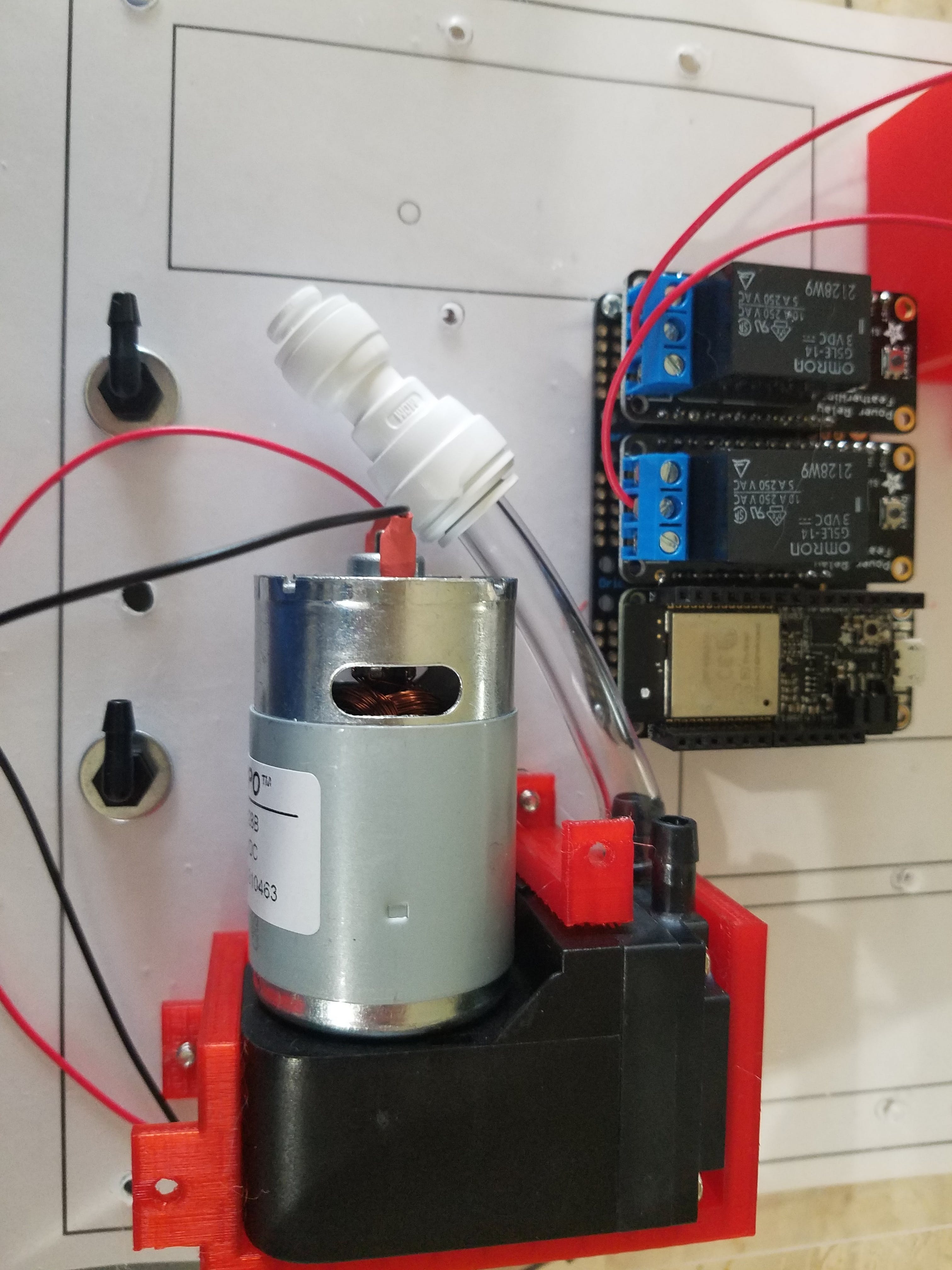
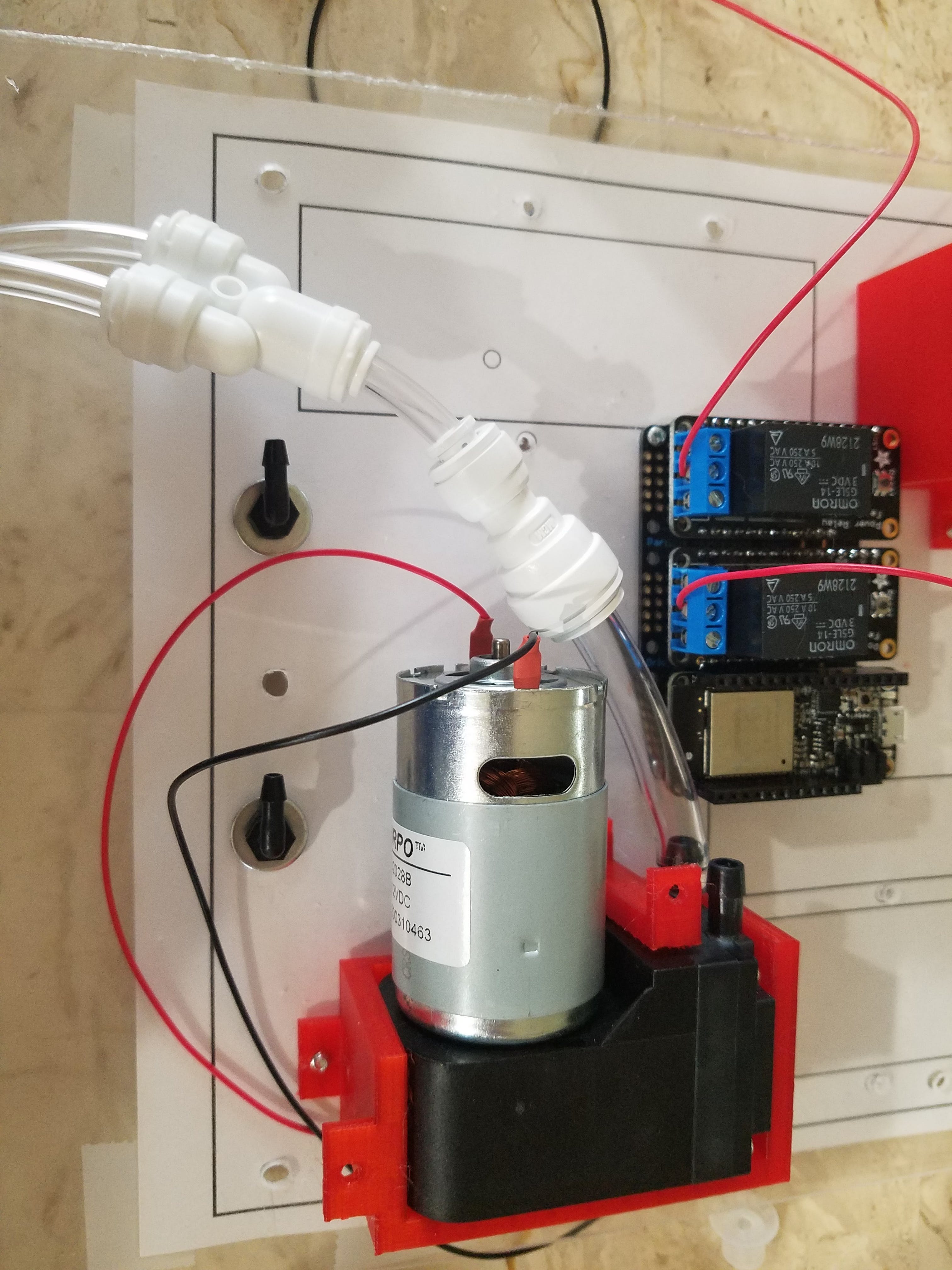
将 12V 气泵的正极连接到 Featherwing 电源继电器板中的 COM(中央连接器)。请注意,泵上的节点不区分正负。对另一个气泵重复此操作。
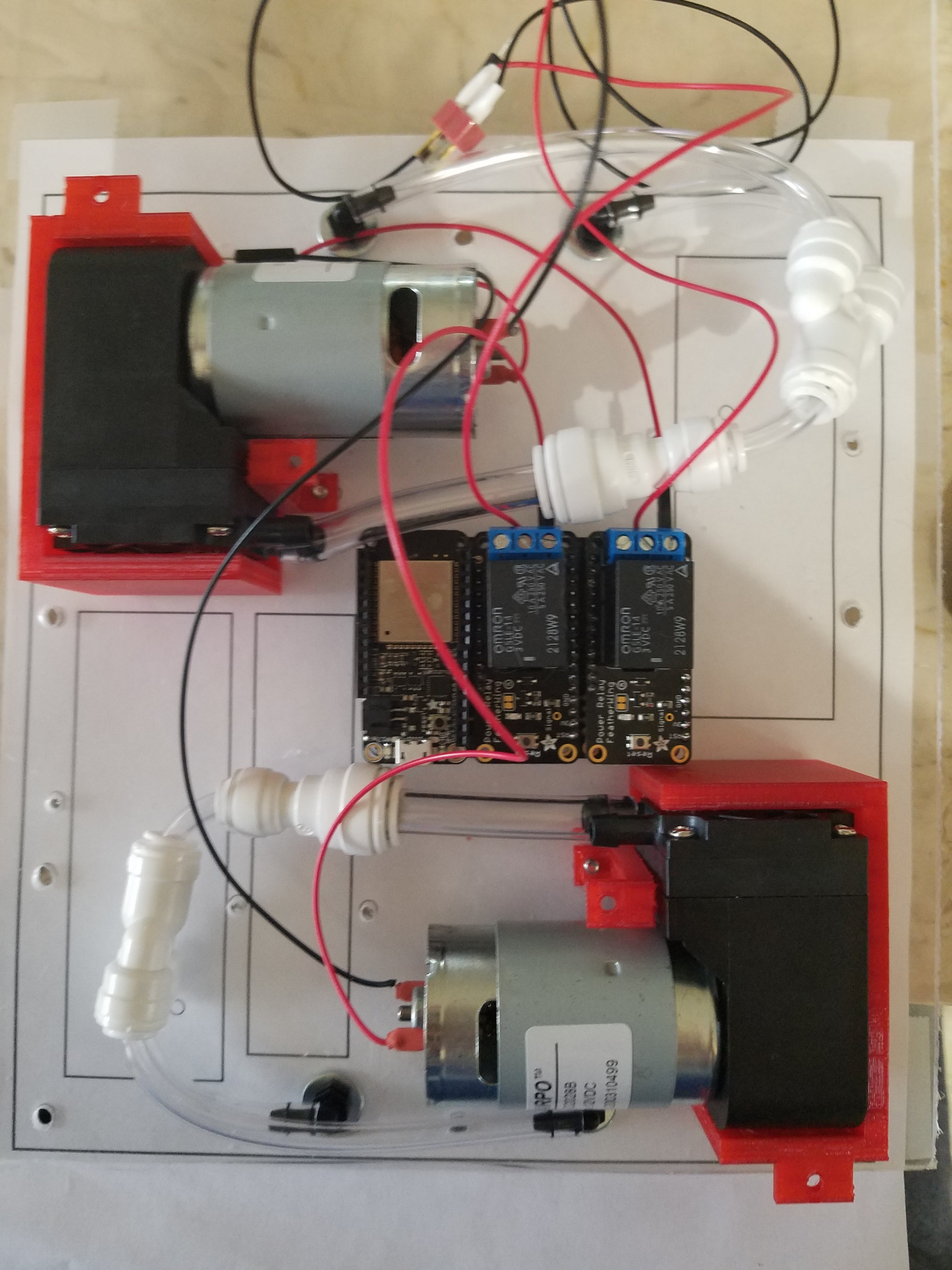
滑动 7.2V 电池并将负极电缆连接到气泵中的负极节点。正极电缆连接到 Featherwing 电源继电器板上的 NO。对另一块电池重复此操作。
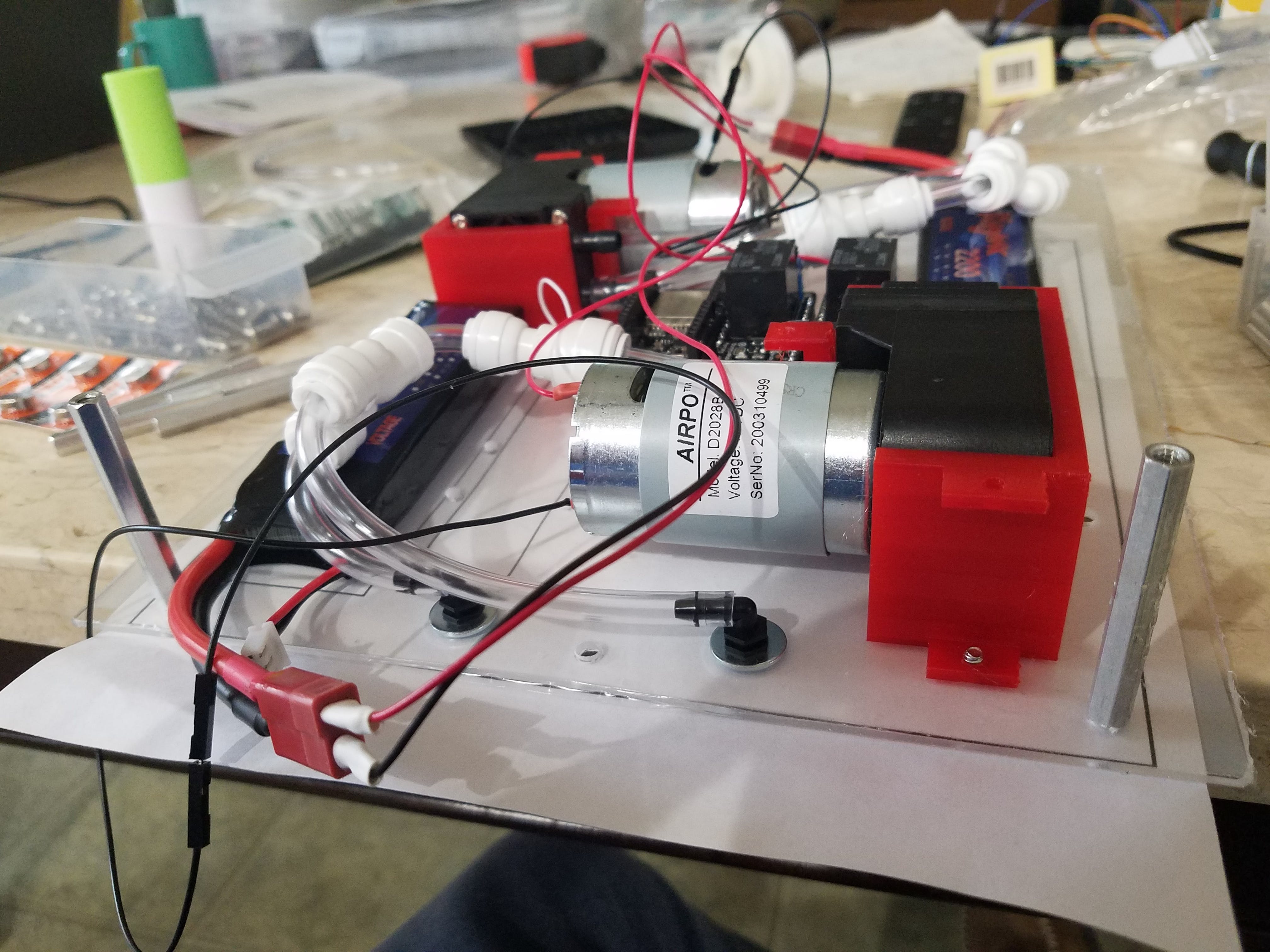
你已经准备好了。这是系统外观的图片。
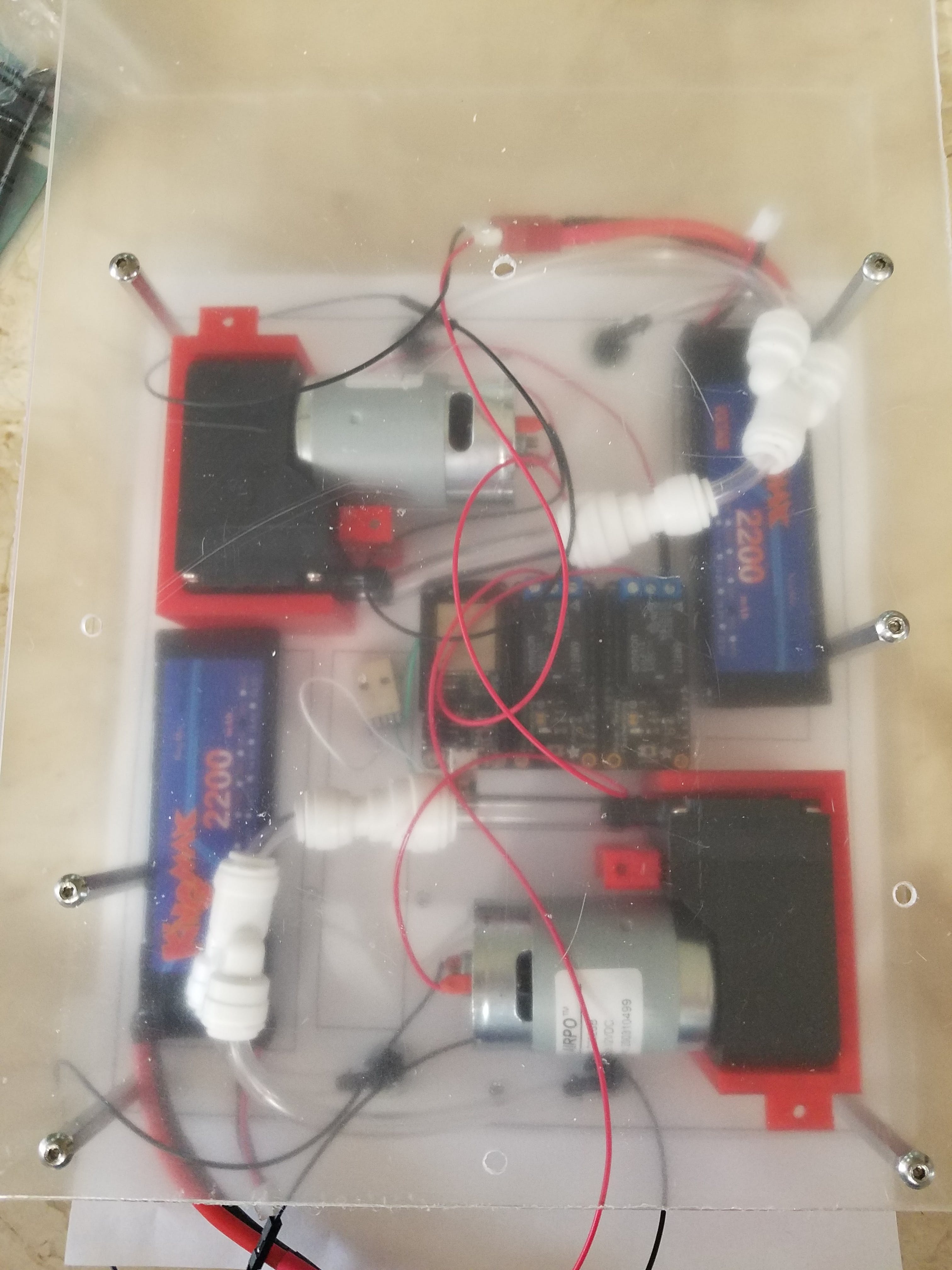
。,以有趣的方式测试系统。
我们使用了五个不同重量的矩形盒子。下表总结了我们测试中使用的内容和重量。
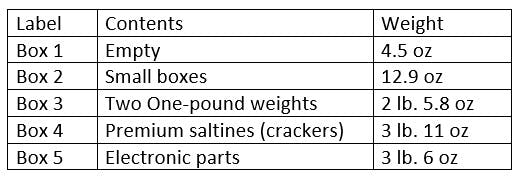
我们注意到盒子 3 的内容在盒子内不安全。
重量分布和光滑的抓握表面是实现牢固抓握物体的两个主要因素。
未来的工作
我们计划添加一个开/关开关和/或远程控制接口(BLE、WiFi)。还要尝试减小系统的打印尺寸,因为它体积庞大且沉重。
虽然,概念验证取得了巨大的成功和乐趣。
谢谢阅读。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




