

导弹滚动视距角速度提取技术
描述
当导弹滚动时,导弹的滚动角速度将与导引头的稳定平台耦合,导致导引头陀螺的输出具有基于真实LOS(视距)角速度的导弹滚动角速度相关的附加信号。基于LOS合成原理,分析了两帧导引头LOS角速度与导弹横滚角速度的耦合机理。为了消除耦合效应,采用卡尔曼滤波技术提取LOS角速度,建立了卡尔曼滤波方程,并通过仿真进行了验证。结果表明:导弹横滚运动影响陀螺输出,卡尔曼滤波技术提取LOS角速度可以满足制导信息精度的要求。
导引头是制导回路的测量敏感元件,它为制导系统提供目标相对于导弹在俯仰和偏航方向上的运动信息。三框架平台导引头可以隔离导弹体在俯仰、偏航和横滚三个方向上的运动,但其结构复杂,体积大;双框架平台导引头控制简单,体积小,但不能隔离导弹体在滚动方向上的扰动。导弹的滚动不仅带来了俯仰和偏航通道的耦合问题,还导致速率陀螺在平台上绕光轴旋转,从而带来了提取LOS角速度的问题。这个问题是可以解决的。相关报道显示,美国已在PAC-3低速滚转导弹中应用了双框架雷达导引头。
我国对滚动导弹与双导引头耦合机理进行了一些研究。分析了导弹横滚角速度对LOS角速度输出的影响,认为当电轴方向与平台方向存在偏差时,导弹侧倾扰动会额外引入LOS角速度输出误差。在导弹横滚角小的假设下,研究了双通道解耦后的单通道控制问题。针对侧组转导弹的大横滚运动提出了一种前馈补偿方案,减小了在250 °/s横滚角速度干扰下横滚角速度对指令输出的影响。分析了导弹侧倾对导引头跟踪精度的影响,提出了横滚角速度的前馈补偿控制方案。分析了角速度及其垂直于LOS的分量,这是由于目标在导引头视场内移动时LOS相对于光轴的运动引起的。本文在已有研究的基础上,研究了导弹侧倾情况下LOS角速度的提取方法。

卡尔曼滤波技术已广泛应用于状态估计、预测、数据平滑等。将卡尔曼滤波应用于目标跟踪,设计了导引头平台的卡尔曼跟踪模型。卡尔曼滤波用于估计带有并联导引头的旋转导弹的LOS角速度。针对机动目标被动跟踪问题,利用卡尔曼滤波利用导引头角度信息估计制导信息。因此,考虑卡尔曼滤波可以解决导弹旋转时制导信息提取的问题。
首先,基于运动合成原理,分析了导弹横滚对导引头平台上陀螺输出的影响,推导了导弹滚转与导引头陀螺输出的耦合机理;针对这一问题,提出卡尔曼滤波提取LOS角速度。建立卡尔曼滤波方程,利用估计状态量提取LOS角速度。最后,通过硬件在环仿真和数值仿真验证了本文提出的理论和方法。
在实际工程中,当导弹体的横滚角速度较大时,横滚角速度会耦合到LOS角速度中,导致陀螺输出误差增大,超出了制导系统可以承受的误差范围。下面将详细分析这种耦合机制。
基于卡尔曼滤波的LOS角速度提取
为了便于分析,假设目标拟合一个恒定加速度运动模型,即惯性系统中目标加速度在各轴上的投影为一个常值,将目标加速度的差分视为随机白噪声。当卡尔曼滤波方程建立后,可以将状态向量X(t)(作为方程(8))作为导弹和目标在惯性坐标系中的相对位置、相对速度和相对加速度。由于导弹的加速度可以通过惯性导航系统测量。

根据导弹本体的姿态角、导引头稳定平台的框架角和LOS的误差角,可以计算出导引头的LOS角。因此,认为导引头的LOS角度是可测量的。
仿真结果与分析
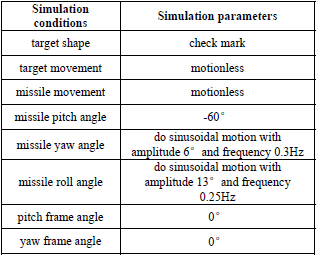
为了验证前面的讨论,使用了硬件在环仿真和数值仿真相结合的方法。使用某种类型的导引头作为模拟对象,安装在五轴转盘上,模拟导弹飞行环境。导引头安装在三轴转盘上,可以模拟导弹的俯仰、偏航和横滚运动。目标模拟器安装在两轴转盘上,可以模拟目标在LOS坐标系中的俯仰和偏航运动。模拟条件设置如下:
表一. 仿真条件和参数
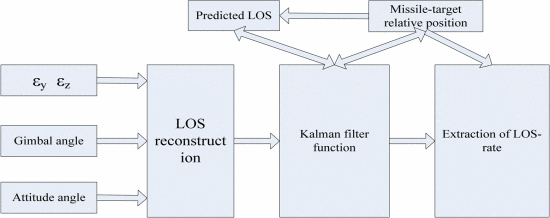
硬件在环仿真完成后,提取实验数据,在Matlab环境下运行卡尔曼滤波程序,分析LOS角速度提取的改进情况。卡尔曼滤波程序的逻辑关系如图3所示。
通过分析硬件在环仿真的结果,我们可以得到俯仰和偏航方向的陀螺仪输出与导弹体的横滚角速率之间的比较,如图4所示。观察陀螺仪的输出和导弹的滚动速度,我们可以看到它们的相位是一致的,这证明滚动速度会耦合到陀螺仪的输出中,正如前面论文中推导的那样。由于导弹和目标都是静止的,因此理想的LOS角速度为零。从图4可以看出,陀螺输出的LOS角速度噪声较大,俯仰陀螺的误差峰值可达5°/s,方差为1.56°/s,偏航陀螺的误差峰值可达2.1°/s,方差为0.43°/s。这超出了制导系统的允许误差范围。在导弹横滚的情况下,陀螺仪的输出不能代表真实的LOS角速度,这与之前的推导一致。因此,需要一种新的方法来提取LOS角速度来完成引导环路。新方法不应受到导弹滚动的影响。
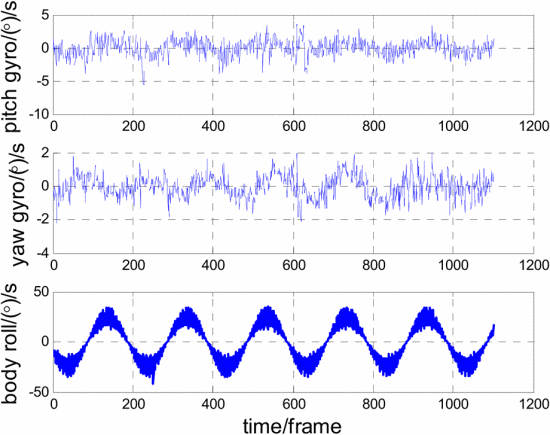
陀螺仪输出和导弹滚动速率
在硬件在环仿真提供的数据基础上,使用卡尔曼滤波器得到LOS角速度。结果如图5所示。可以看出,与陀螺仪的直接输出值相比,基于卡尔曼滤波技术提取的LOS角速度精度有了很大的提高,误差峰值约为0.02°/s,满足制导系统的要求,可用于制导。由于卡尔曼滤波中使用的可测参数大多受导弹滚动的影响,因此提取的LOS角速度也具有一定的周期性。
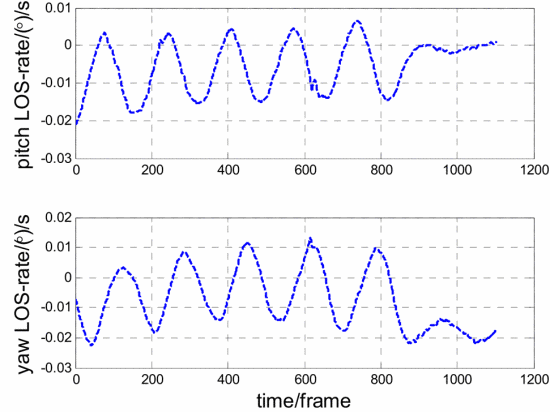
卡尔曼滤波提取LOS角速度
双框架平台导引头无法隔离导弹的滚动运动,导弹滚动角速度与平台陀螺输出耦合,陀螺输出与实际LOS角速度存在较大差异。采用卡尔曼滤波技术提取LOS角速度可以减少耦合的影响,大大提高LOS角速度提取的精度,提高制导信息的质量。
-
读取ADIS16405角速度的时候,静止状态下角速度不正常的原因?2024-01-02 0
-
线速度、角速度与转速2012-01-11 0
-
ADIS16405角速度读取数值不正常2018-12-10 0
-
测量磁拌子角速度2020-01-12 0
-
超视距雷达及其防空应用2008-12-05 423
-
压电射流角速度传感器的软件补偿技术2009-06-23 519
-
一种硅微振动角速度传感器2009-07-17 395
-
角速度传感器CJSYS-A01用户手册2010-12-30 627
-
基于Kalman滤波的俯仰角速度估计2011-06-21 783
-
基于H_次优滤波的速度_角速度传递对准研究_程建华2017-03-19 475
-
角速度与转速的关系2017-11-15 81519
-
如何设计一个基于汽车横摆角速度的模糊自适应PID控制器2019-10-11 1617
-
ADXRS652: ±250°/s偏航角速度陀螺仪2021-03-21 448
-
陀螺仪三轴角速度转姿态角速度2024-01-02 651
-
常用的角速度传感器包括几种类型2024-01-03 634
全部0条评论

快来发表一下你的评论吧 !
