

基于XCZU3EG/XCZU4EV/XCZU5EV核心板的无人机视觉跟踪系统解决方案
电子说
描述
在农业生产领域,无人机视觉追踪系统运用在识别农作物的生长情况中,进行高空灌溉、驱赶害虫等自动化农业管理;在民用领域,无人机通常使用视觉跟踪系统识别人体手势,让用户通过手势操控无人机的升降和摆动;在生物调研领域,该技术更多是为了追踪记录野生濒危动物的生活习惯,维护生态系统平衡。
无人机跟踪系统是如何组成的呢?首先,无人机通过高清摄像头模块,实时采集图像数据,系统通过信号检测模块和图像预处理模块将图片信息转变成数字信息,然后通过数据采集与处理模块进行采样、量化,并对各图片参数进行分析过滤;将分析结果与设定的跟踪目标比较,进行图像识别跟踪;跟踪的图像信息可以通过网络传输到手机和电脑实时显示。
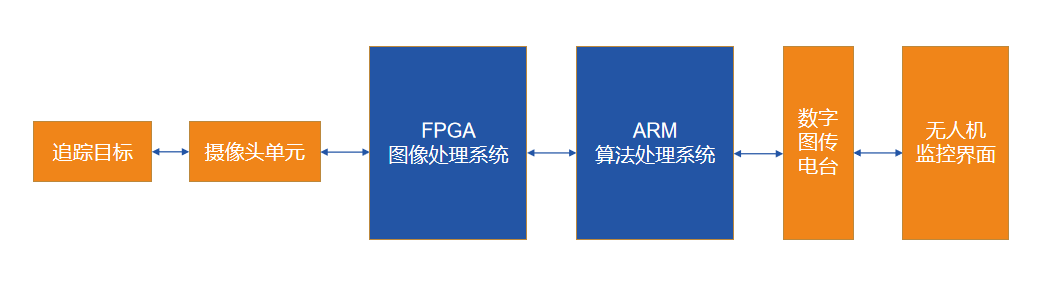
无人机视觉跟踪流程图
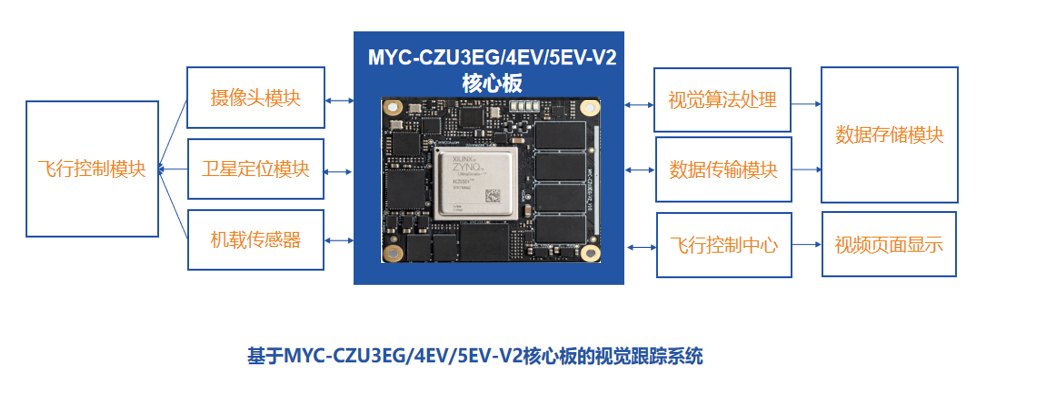
基于米尔电子MYC-CZU4EV/5EV-V2核心板设计的无人机视觉跟踪系统,可以分为图像信号采集、数据处理、信息展示三部分;图像采集主要通过摄像头收集图像信息,再由FPGA芯片高速采集将图片信息传输到数据处理单元,数据处理单元由VCU和MCU组成,负责将采集的图像数据通过算法把设定好的跟踪目标进行标注处理;而信息展示部分,则通过无线传输系统把信息同步显示到无人机控制平台和APP上面,实现实时视频传输,掌握远程定位追踪功能。
MYC-CZU3EG/4EV/5EV-V2核心板,搭载功能全面的高规格Zynq UltraScale+ MPSoC芯片,其中芯片的PS端集成了APU ARM Cortex™-A53处理器,RPU Cortex-R5处理器,频率高达667MHz的Arm Mali-400 MP2(GPU)。需要注意的是,4EV/5EV芯片比3EG芯片多了一个视频编解码器单元 (VCU),支持H.264/H.265编解码。芯片搭载内部存储器,外部存储器接口(DDR)和外设接口。这些外设接口主要包括USB总线接口,以太网接口,SD/eMMC接口,I2C总线接口,CAN总线接口,UART接口,GPIO等。高速接口如 PCIE,SATA,Display Port。
核心板图片:

板卡资料:
机械参数

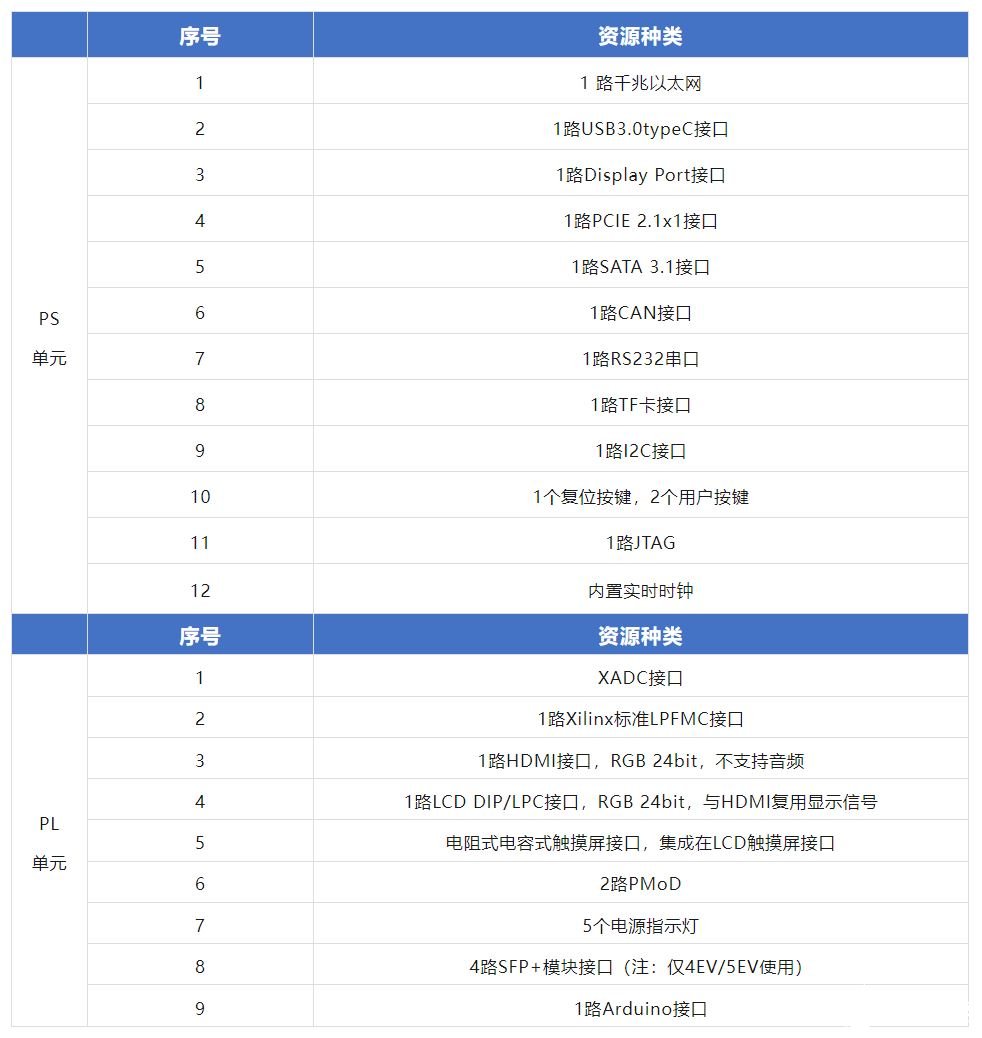
底板资源
本文转载自:米尔MYiR微信公众号
审核编辑:汤梓红
-
将pkg文件与ibis文件集成到XCZU3EGS-FVA625时出现问题2020-05-05 0
-
请问有XCZU9CG-FFVC900的原理图库吗?2024-04-01 0
-
ZYNQ Ultrascale XCZU9EG这款芯片怎么看能支持的时钟范围是多少?2019-11-01 0
-
米尔MYD-CZU3EG搭载Xilinx DPU,具备强大AI计算能力,你怎么看米尔这款产品?2020-09-27 0
-
XCZU15EG板卡学习资料第524篇:基于XCZU15EG的FMC+ 高性能通用信号处理板卡2020-12-14 0
-
XCZU4EG-L2FBVB900E系统SOC芯片2021-04-26 0
-
XCZU7EG-1FBVB900I系统SOC芯片2021-04-26 0
-
XCZU19EG-L2FFVD1760E系统SOC芯片2021-04-26 0
-
XCZU9EG板卡设计原理图:基于XCZU9EG-2FFVC900的紧凑型图像处理套件2022-03-07 0
-
【资料分享】Xilinx XCZU7EV工业核心板规格书(四核ARM Cortex-A53 + 双核ARM Cortex-R5 + FPGA,主频1.5GHz)2023-06-21 0
-
XCZU3EG开发笔记之gpio_emio2019-09-03 3801
-
XCZU47DR-L2FFVE1156I 详细产品资料2021-12-03 2202
-
无人机视觉跟踪系统解决方案-米尔基于XCZU3EG/XCZU4EV/XCZU5EV核心板2023-05-11 843
-
XCZU15EG板卡设计原理图:基于 XCZU15EG的双 FMC通用信号处理板2023-08-02 1436
-
XCZU15EG设计原理图:523(ZCU102E的pin兼容替代卡) 基于 XCZU15EG的双 FMC通用信号处理板2024-04-16 177
全部0条评论

快来发表一下你的评论吧 !
