

说一说SVPWM发波到底是怎么回事
工业控制
描述
前言
SVPWM调制直接着眼于如何使负载电机获得圆形旋转磁场,这与现代电机控制常用的磁场定向控制的思路高度吻合,因此在电机控制领域获得了广泛的应用,那么电控小白今天就来和大家说一说SVPWM到底是怎么回事。
SVPWM调制全称为空间电压矢量PWM调制,它可以使逆变器输出线电压最大幅值达到母线电压Udc。
PWM发波的基础-面积等效
我们以一个简单的拓扑来说明PWM调制的基本原理。
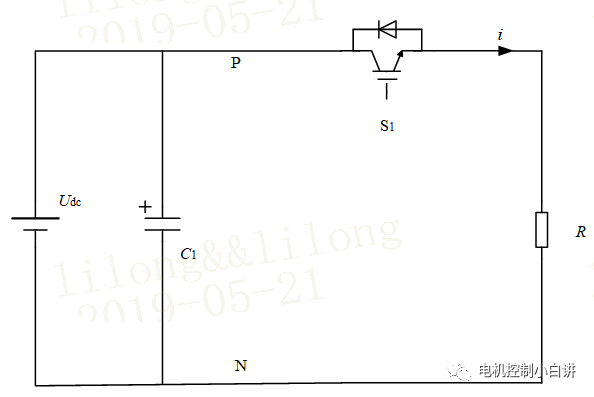
工况1:S1导通,此时负载R上的电压Udc;
工况2:S1关断,此时负载R上的电压0;
如果我们想给负载R施加一个电压Uref,且满足0≤Uref≤Udc,那我们怎么实现呢?
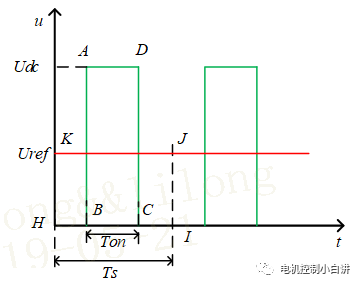
假定控制S1以Ts为周期进行开通关断切换,同时导通时间为Ton,那么在负载R上就可以获得如图中绿色曲线所示的电压波形。
如果我们保证Ton满足以下约束条件:
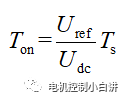
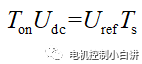
那么绿色曲线形成的电压脉冲在Ts内的平均值就等于Uref。同时对于矩形ABCD和HIJK的面积相等:
利用面积相等的周期性脉冲电压来等效稳定直流电压的方法即面积等效原理。
基于面积等效原理,我们就能利用脉冲电压等效我们期望的其他直流输出电压。
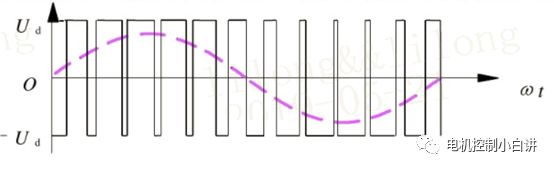
如果我们输出的脉冲电压的脉冲宽度按正弦规律变化,那么我们就能得到等效电压按正弦规律变化的一系列脉冲电压,而这一系列脉冲电压组合在一起就构成了完整的正弦电压。
三相逆变器如何驱动?
三相逆变器由三个桥臂6个开关器件构成,忽略死区时间,同一桥臂上下两个开关器件互补导通。对于每一个桥臂,上管导通,输出电压为Udc,下管导通,输出电压为0。
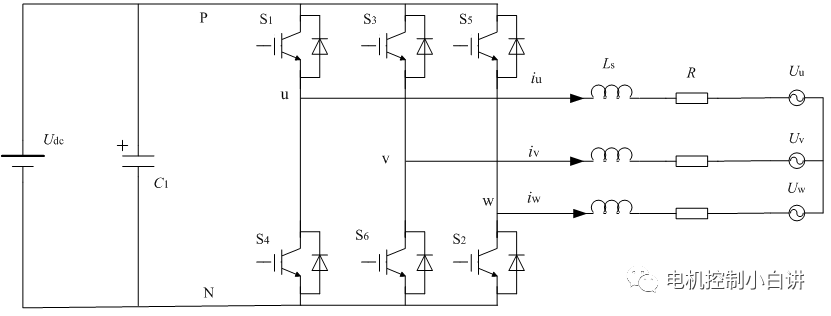
为了方便分析,我们假设上桥臂开关器件导通、下桥臂关断状态为1,上桥臂器件关断、下桥臂导通状态为0。
基于以上假设,三相逆变器的桥臂器件不同的开关状态组合一共有8个,分别为(000)、(100)、(010)、(001)、(110)、(101)、(011)和(111),这八种不同的开关状态组合就构成了SVPWM调制的8个基本电压矢量。在这8个矢量中,(000)和(111)分别对应上管全开(下管全关)和下管全开(上管全关)状态;在这两种状态下,等效将输出的三相短路,这时候作用到负载上的线电压为0,所以这两个状态被称为零矢量,而其余6个为有效矢量。
如何理解8个基本电压矢量?
前面说到了SVPWM调制的基础是8个基本电压矢量,那么这8个基本电压矢量怎么理解呢?
我们以矢量(100)来说明这个问题,(100)表示U相上桥导通,V和W相下桥导通,这时候负载的等效电路如下图所示。
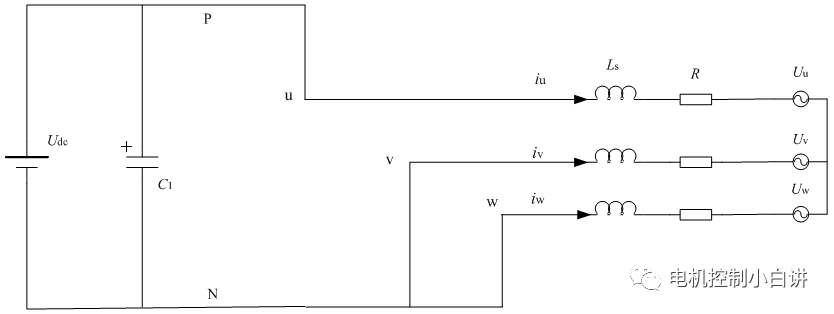
从图中可以看出,负载侧为V和W并联,然后和U相串联;电机三相的阻抗相等, V和W并联阻抗为U相的一半,所以这时候作用到U、V、W三相的电压为:
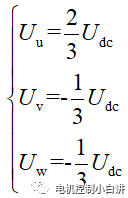
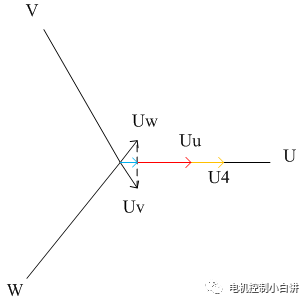
UVW在空间上构成三相静止坐标系,可以画出三相电压在静止坐标系的分布如下图:Uu在U轴正方向,Uv在V轴负方向,Uw在W轴负方向 。Uv和Uw两个矢量在U轴的投影为正方向,幅值均为(1/6)Udc,所以合成矢量U4(100)在U轴正方向,幅值为Udc。
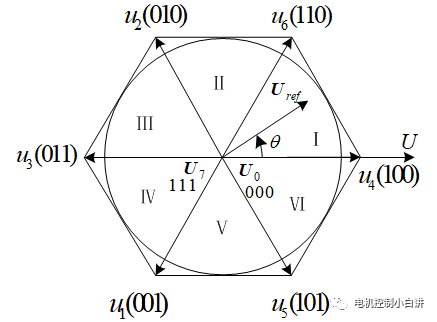
利用同样的方法,可以分析出另外五个有效矢量在三相坐标的分布情况,这六个基本电压矢量就够成了我们常说的SVPWM电压六边形,SVPWM调制输出的所有电压都无法超出这个六边形的范围;6个有效电压矢量将整个六边形等分为6个扇区。
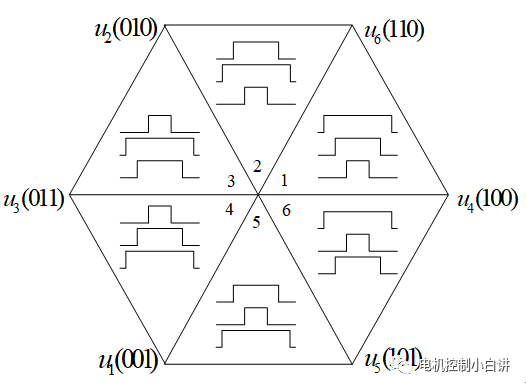
可能大家会记不清这6个基本电压矢量的位置分布,在这里,电控小白提供一个简单的方法:
1、这6个基本电压矢量其实都是分布在UVW三相坐标系的坐标轴正负方向上。
2、对于上桥只有一个开关器件导通的矢量(u4(100)、u2(010)和u1(001)),我们可以发现:u4(100)是u相上桥导通,而它在U轴正方向上;u2(010)是v相上桥导通,而它在V轴正方向上;u1(001)是w相上桥导通,而它在w轴正方向上;因此对于上桥只有一个器件导通的矢量,哪一相导通,它就分布在对应的坐标轴正方向上。利用这个方法我们就能很简单画出三相坐标轴正方向上的矢量分布。
3、对于上桥两个开关器件导通的矢量(u6(110)、u3(011)和u5(101)),我们可以发现:同一个坐标轴上的两个矢量,它们的对应关系是开关状态按位取反,比如坐标轴V上的矢量,正方向是u2(010),那么将(010)按位取反得到(101),则V轴负方向上的矢量为u5(101)。
如何理解有效电压矢量幅值为(2/3)Udc?
也许很多人会奇怪:其他文献都是说SVPWM的基本电压矢量幅值是(2/3)Udc,但我们前面分析的矢量幅值是Udc呢?
其实这个问题不难理解,对于三相对称的正弦电压
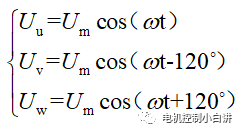
我们知道在三相静止坐标系下,其合成矢量为逆时针方向旋转的电压矢量,旋转角速度为w,矢量幅值为(3/2)Um。
这时候为了方便分析,我们可以将其乘以一个系数(2/3)作为合成矢量的幅值,这样得到的合成矢量幅值就与相电压的幅值相等,这种坐标变换的方法就是我们常说的等幅值变换。
所以我们常说的基本电压矢量幅值为(2/3)Udc都是基于等幅值变换而言的,如果采用非等幅值变换,SVPWM的基本电压矢量幅值就不在是(2/3)Udc,这个问题电控小白将在后续的文章为大家说明。
为了方便大家理解,后文的分析均针对等幅值变换。
如何利用基本电压矢量输出任意电压呢?
有了8个基本电压矢量,我们就可以利用矢量分解与合成的方法去构建电压六边形内的任意电压矢量,这就是SVPWM发波的基本思路。
假定我们想输出一个第一扇区的矢量Uref,与在静止坐标系下的角度(与U轴的夹角,逆时针为正)为θ,那我们如何利用8个基本电压矢量来实现它呢?
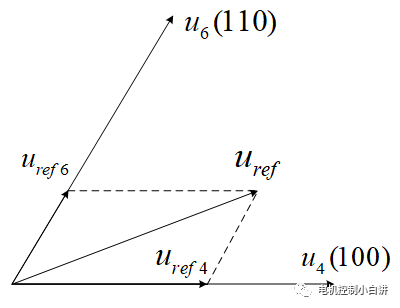
我们可以用Uref4和Uref6来合成Uref,它们的关系满足:
具体可以依据下面的步骤完成。
1、 根据扇区号确定用于合成的两个基本电压矢量:u4(100)和u6(110)。同时假定上桥臂导通一个器件的基本矢量为V1,作用时间T1;上桥臂导通两个器件的基本矢量为V2,作用时间为T2;零矢量均用V0表示,作用时间T07。
2、 根据角度θ和扇区号,确定Uref与上桥只导通一个开关器件的基础电压矢量的角度θ1;举例说明:如果Uref在第一扇区,θ1就是Uref和u4(100)之间的角度,即θ1=θ;如果Uref在第二扇区,θ1就是Uref和u2(010)之间的角度,即θ1=120°-θ。
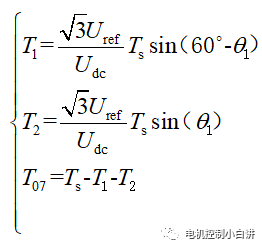
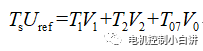
3、 根据矢量合成的原理,需要满足
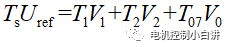
然后根据矢量关系,我们可以推到出
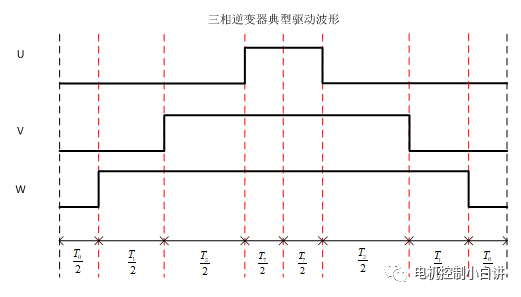
4、 利用计算的T1、T2和T07计算UVW三相对应的导通时间,根据前文的典型驱动波形,可以将三相驱动波形按高电平占空比时间大小区分为Tmax、Tmid和Tmin,并按下式计算
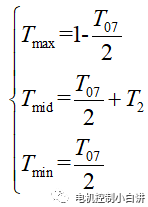
然后结合扇区号,将Tmax、Tmid和Tmin按对应关系赋值给U、V和W即可。
通过上面的方法,不论我们想输出什么样的三相电压,我们都可以将它进行坐标变换,转换为电压矢量,然后利用SVPWM调制实现。
工程实现上的比较值如何理解
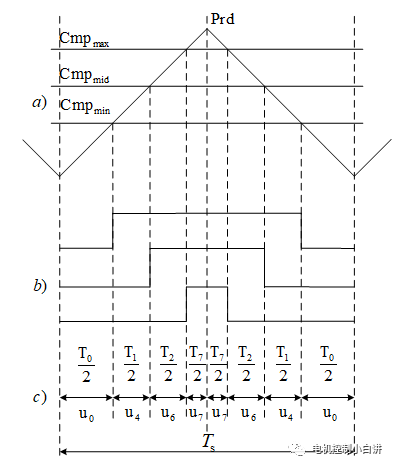
在实际的工程应用上,我们实现SVPWM都会借助微处理器(DSP、单片机)的发波模块来实现。这里以常用的三角波模式(增减计数)来说明。
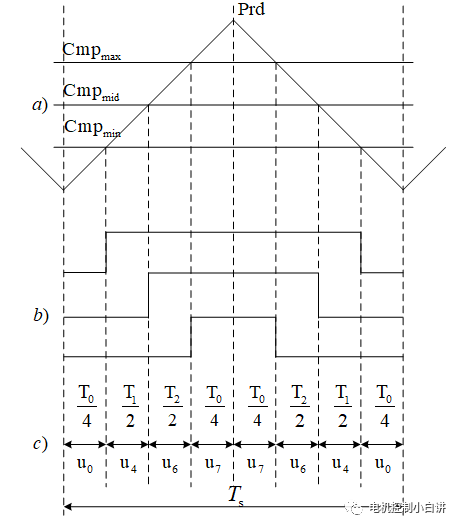
从比较值的计算和图形,其实我们可以发现一些有趣的东西:
1、对于常规的SVPWM,CmpMax到计数器周期点的距离其实与CmpMin到0的距离相等,这里体现的正好是两个零矢量(u0(000)和u7(111))的作用时间相等,两者等分零矢量时间T07。
2、CmpMax和CmpMin之间的距离体现的是有效时间V1和V2的作用时间之和;
3、CmpMid的作用是使两个有效电压矢量进行切换,即决定两个有效电压矢量分别的作用时间。
非等分零矢量如何理解?
那么如果我们保持CmpMax、CmpMid和CmpMin三者的相对位置不变,同时对它们进行上下移动,这时候会怎么样呢?
基于前面的分析,只要我们保持CmpMax、CmpMid和CmpMin三者之间的相对位置不变,有效矢量V1和V2的作用时间就不会改变,任然可以满足
只要上式成立,那么合成电压矢量就还是我们期望的电压输出;因此同时上下移动比较值,对合成电压矢量没有影响,那么它会对什么产生影响呢?
其实从调制波形不难看出,这种上下移动改变的是两个零矢量(000)和(111)之间的时间分配,移动之后,U0和U7就不在等分零矢量时间。
为了说明这个问题,我们定义一个系数r,它满足:
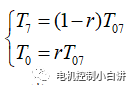
1、当r=1,CmpMax对应的桥臂一直维持0状态,零矢量全部由U0实现;
2、当r=0,CmpMin对应的桥臂一直维持1状态,零矢量全部由U7实现;
3、当r=0.5,与常规的CPWM模式一致,零矢量由U0和U7平分构成。
因此r=0和r=1其实是两种不同的DPWM模式。
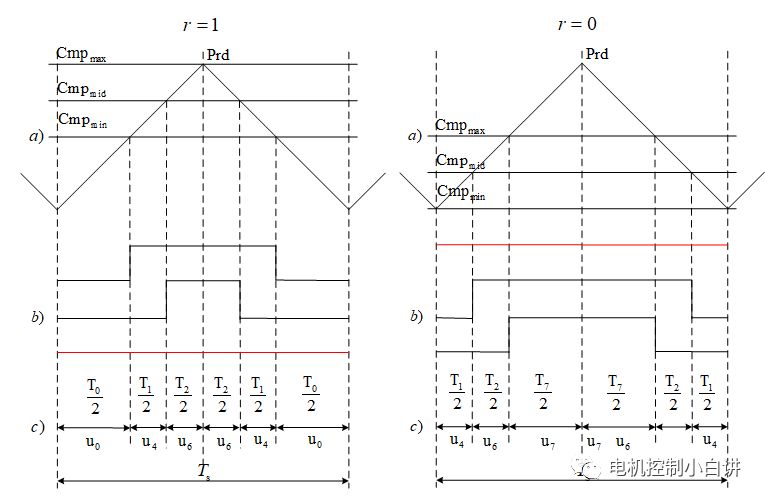
CPWM和DPWM模式下,输出电流的谐波成分和THD均存在差异。我们可以通过仿真数据来具体说明一下:电流的基波频率为20Hz,开关频率为2kHz。
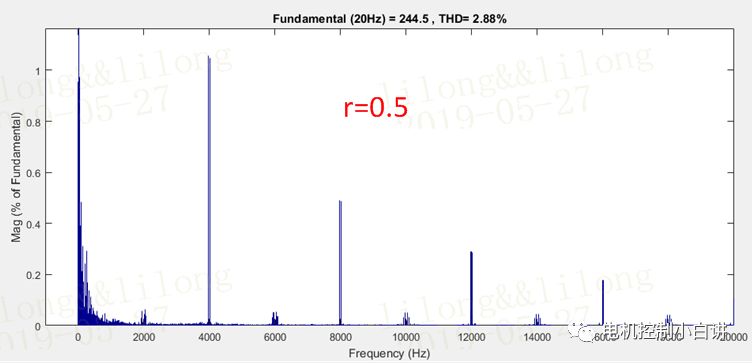
1、对于传统CPWM发波方式,电流中的谐波成分主要分布在2倍开关频率的倍频次;
2、对于DPWM发波方式,电流中的谐波成分主要分布在载频的倍频次,而且THD大于CPWM模式。
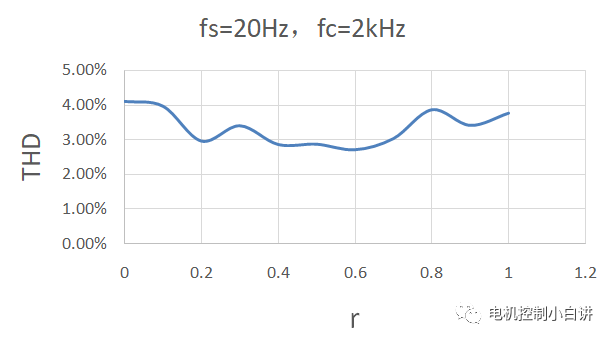
通过仿真我们可以得到不同r下的电流THD分布情况:
1、随着r取值的变化,电流的THD会发生变化;
2、r=0.5时,电流的THD接近最小。
r对我们工程应用的价值
对于r取值会影响输出电流谐波成分及THD这一特性对于我们实际工程应用是具有重要价值的。
对于几百千瓦甚至上兆瓦级别的电机控制器而言,因为输出电流极大,为了降低开关器件上的损耗,系统开关频率一般都设置的较低(1kHz或者更低)。电机控制器在如此低的开关频率下运行,系统的电磁噪音将会十分明显,同时因为系统开关频率只有1kHz,传统的降噪方法(随机开关频率调制)效果将大打折扣。
这时候我们不妨让r按一定的序列实时变化,这样电流中的谐波成分也将实时变化,而不在是集中在某几个频率点附近。
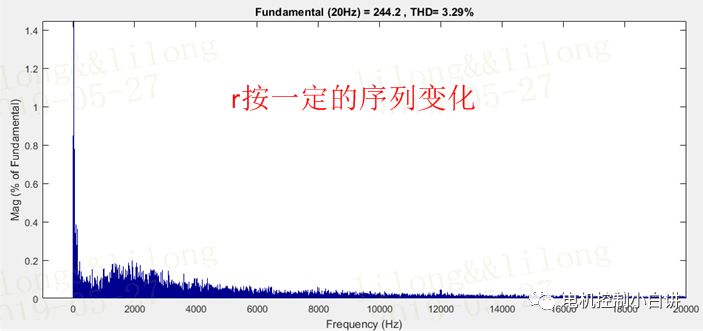
从仿真波形可看出,电流中的谐波成分主要均匀分布在低频区域,不会出现在噪音集中的频率点,这时候控制器的电磁噪音将从刺耳的高频转变为低沉的声音。
-
SVPWM到底是什么2021-08-27 0
-
[原创]简单的说一说放大器的维修2010-03-22 0
-
我的proteus是怎么回事?2013-10-28 0
-
添加过孔变绿了,这是怎么回事?2015-05-29 0
-
请问采用正弦波驱动的无刷电机,还有弱磁控制一说吗?2015-12-22 0
-
照明光源频闪是怎么回事?2019-07-24 0
-
详细说一说降压型开关电源(BUCK)相关的设计细节2022-01-03 0
-
S32DS构建没有收到任何.elf文件是怎么回事2023-04-14 0
-
NB-IOT模组到底怎么用的?2023-10-31 0
-
线性科技是怎么回事?2021-04-21 570
-
说一说对模拟电路这门课的理解2022-10-24 820
-
所有这些干扰是怎么回事?2022-11-04 289
-
CNN到底是怎么回事?2023-06-28 3371
-
定频风管机报E3保护到底怎么回事?2023-08-21 1074
全部0条评论

快来发表一下你的评论吧 !
