

pwm控制的基本原理
电子说
描述
本应用程序注释详细介绍零露性脉冲- Width modult (PWM) 控制(ZDP) 。TMZDP TM是一种MPS专有、固定频率电力供应控制方法,它比普通固定频率控制方法(例如电压模式控制或峰值当前模式控制)改进了瞬时反应。
Introduction
MPS的零缓期PWM(ZDP)TM控制为电力供应设计提供了许多好处,包括快速瞬时反应和稳定的开关频率(f)SW描述一些共同的控制地形(电压模式控制、当前模式控制、以及定时[COT]控制),以建立基准,与ZDP进行比较。TM然后是ZDPTM此外,还详细介绍了其益处。
Conventional Control Methods
电压模式控制
电压模式控制是最简单的控制方法之一。图1显示电压模式控制。
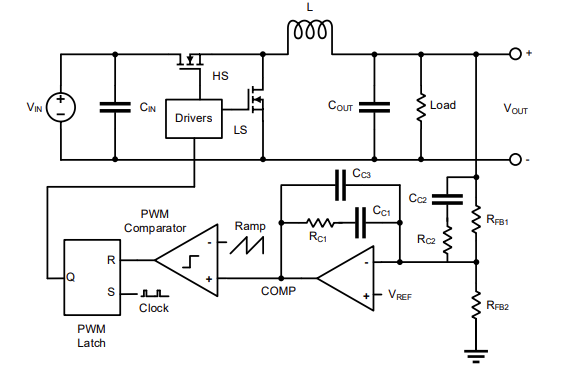
Figure 1: 电压模式控制
反馈电压和参考电压(V)之间的差异FB- 五级REF放大以生成错误信号(通常为计算电压) 。错误信号与电站级的电压斜坡作比较,以生成电站值周期。 电压模式控制需要高 ESR 电容器或第3类补偿来稳定系统。控制收益也与输入电压成正比(V)。IN这使跨频率随着V而变化。IN为避免这种情况,坡道电压应与V成比例IN.
峰值当前模式控制
峰值当前模式控制是汽车动力供应最常用的控制方法之一。 图2显示峰值当前模式控制。
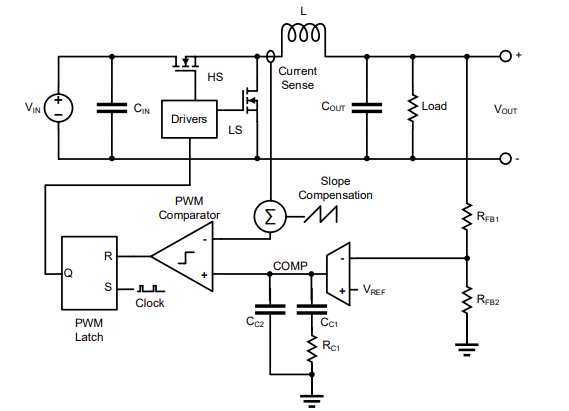
Figure 2: 峰值当前模式控制
类似于VV电压模式控制FB- 五级REF放大以生成错误信号。 峰值当前模式控制将错误信号比作感应器当前信号( I) 。L))),它通常通过镜像MOSFET、感应阻力或无损流感电路被感应到。通常,峰值当前模式地形包括一个坡度补偿信号,以确保稳定值周期超过50%。L在循环周期中,赔偿的复杂性降低,只需要第2类赔偿。这也消除了控制收益影响V。IN,这意味着整个五星年的跨重叠频率保持相对稳定。IN范围。
当前信号在转换过渡期间的峰值当前模式地形表中不稳定,当高端MOSFET(HS-FET)打开时,PWM参照器应在短期内空白。 这导致更长时间的最低时间( t) 与电压模式控制、传统COT或ZDP相比TM.
在MPS设备,如MPQ2167、MPQ4436、MPQ4323和MPQ4430中,实施了峰值当前模式控制。
传统定时固定(COT)控制
在高性能应用中,传统的COT控制用于提高短期性能,图3显示了传统的COT控制。
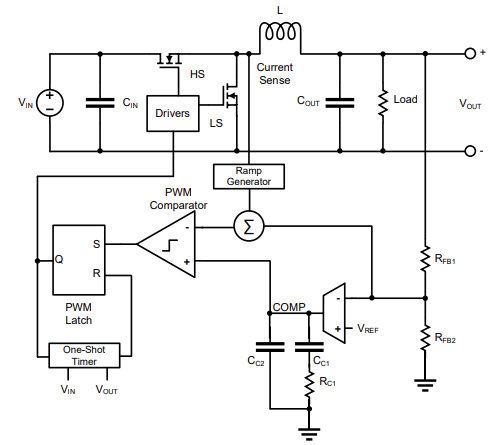
Figure 3: Traditional COT Control
传统COT控制与V比较FB直接对 V 直接对 VREF触发脉冲上的脉冲。只有反馈信号波波与I相联时,才可能发生这种情况。L。这可能来自输出电容器 ESR、置于感应器上方的斜坡注射电路或内部生成的合成斜坡。FB跌落到 V 下REF或错误信号或错误信号,即生成时脉冲并输入大门驱动器。在大瞬时中,通过内部最短时间生成连续实时脉冲,以恢复输出电压(V)OUT)快速。与电压模式控制和当前模式控制相比,这提供了更好的负载瞬时反应。
错误放大器(EA) 可以用作生成与 V 比较的错误信号的缓慢路径FB通过第2类补偿,可以实现传统的COT控制,从而减少COT地形学系统的组成部分计数。
由于连续的实时脉冲可在负载瞬时反应时发生,fSW这可能不适合在EMI性能更令人关切的情况下申请,例如工业或汽车电子产品,而EMI要求严格,以减少系统中的对口联系。
在MPS设备(如MPQ2179、MPQ2172和MPQ3431A)中实施了COT控制。
Zero-Delay PWM Control (ZDPTM)
建筑结构结构
零露天PWM(ZDP)TM控制达到与传统的COT控制相同的负载瞬时性性能,但采用固定频率办法。TM.
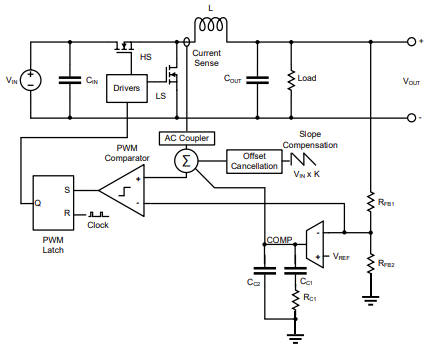
Figure 4: 零露天PWM(ZDP)TM) Control
类似于传统的KOT控制,ZDPTM将反馈节点直接连接到PWM比较器,从而创建了通往PWM比较器的快速路径,从而绕过EA。 这一快速路径快速改变驱动 HS-FET 和 低端MOSFET (LS-FET) 以补偿 V 的值勤周期OUT在不向上或向上或向下提高补偿值的情况下波动。例如,当 V 时OUT由于大量负荷瞬变而减少,在下一个周期,任务周期在下一个周期期间增加,以便向输出电容器提供恢复V的动力OUTZDP 津巴布韦民主党TM在不调整 f 的情况下实现此目标SW(见图5)。
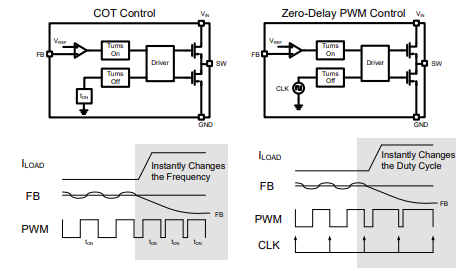
Figure 5: Traditional COT Control vsZDP 津巴布韦民主党TM
与传统的 COT 控制类似, 使用 EA 的慢路径会提高调控精度。 慢路径的使用( V)FB- 五级REF创建错误信号。该信号以一个与 AC 连接的当前信号和一个斜坡补偿坡坡坡。然后将总和信号与 V 比较。FB中输入一个使用固定频率时钟作为重置信号的 PWM 插件块。ZDPTM与第3类补偿相比,第2类补偿可以节省设计周期的时间,从而实现循环稳定性。
ZDPTM与峰值当前模式控制不同的是,带ZDP的峡谷流感测TM不需要空白时间, 因为当 LS- FET 打开 LS- FET 时可以感应当前时, 不需要空白时间。 通过消除空白时间, 降低 t通 使该装置能够在较低的值班周期内运行,因为V值较大。IN:VOUT比率,和较高的fSW.
ZDPTM在MPS设备中实施,如MPQ4340、MPQ4371和MPQ2286。
模拟结果(1)
图6显示MPQ4340 瞬时模拟模拟结果。
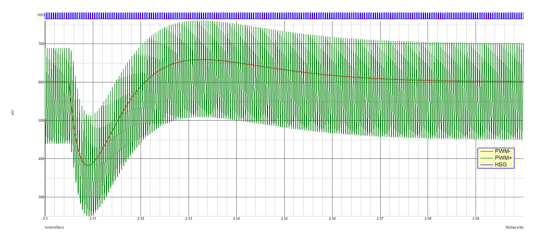
Figure 6: MPQ4340 Load Transient Response
在PWM-是反馈信号的地方;PWM是comp信号、AC结合的当前感知和斜坡补偿的总和;HSG是高端大门启动信号。
VOUT在从0A到4A的输出负载变化引起的低射频小小射线和小小小射速超射后迅速恢复。OUT回收量与PWM-成比例。
一旦PWM超过PWM-(见图7),HSG即开启(见图7)。
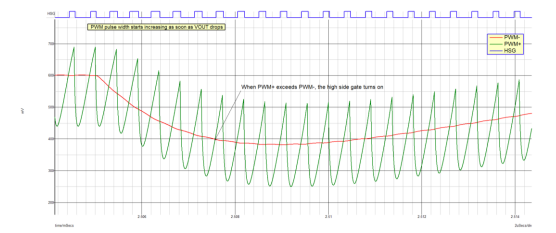
Figure 7: HSG Turns On during MPQ4340 Load Transient Response
曾经五OUT液滴,高SG脉冲宽度增加,为输出提供更多能量并纠正 VOUT在负载步骤之后。
图8显示当负载增加时,值勤周期如何变化,同时仍保持恒定的fSW(见图8)。
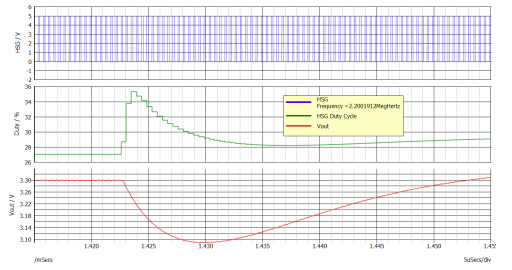
Figure 8: Duty Cycle during MPQ4340 Load Transient Response
图8中的绿色曲线图8显示7页图6和图7图7所示的HSG曲线的值勤周期(百分比),在几个转换周期中,值勤周期从27%增加到35%,以减少五级。OUT允许V(由负载增加引起的),并允许V(由负载增加引起的)OUT图8中的蓝色曲线以恒定 f 表示重债穷国。SW(2.2MHz) 整个载荷瞬时操作。
为观察控制计划的稳定性,制作了模拟预兆地块(见图9)。
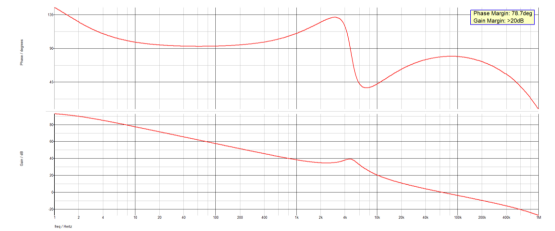
Figure 9: MPQ4340 Bode Plot
相位差和增益幅度超过大多数设计目标。 交叉频率约为63kHz。 由于快速路径, 大型信号瞬时反应优于63kHz交叉频率的预期效果。 通常通过传统的COT控制, 预兆图无法准确反映与传统当前模式控制装置预兆反应相比, 负载瞬时反应的改善。
注:
(1) (1) 五IN= 12V,V = 12V,VOUT= 3.3V, 0A至4A负载级,50A/μs, fSW=2.2MHz,L=1微克H,COUT= 2 x 22微克F,在 MPQ4340 上测试模拟电容器电压降压。
与其他固定频率控制方法(例如,电压调控模式和峰顶当前模式控制)相比,零调值PWM(ZDP)TM控制快速路径 控制快速路径 大大改进了瞬时反应。图10显示 ZDP 之间的瞬时比值为 0A 到 3. 5A 。TM(MPQ4340)和峰值当前模式控制(MPQ4430)。MPQ4340和MPQ4430具有相同的电导、电容器和fSW.
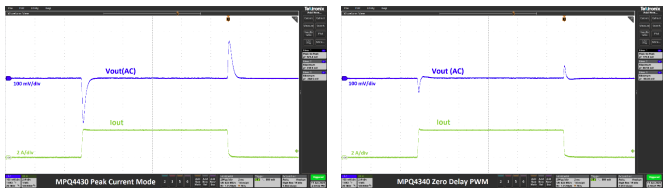
Figure 10: Load Transient with ZDPTM vs. 峰值当前模式控制
波形显示523米VPK-PKMPQ4430 和 a 170mV 的 MPQ4430 和 a 170mV 瞬时式负载PK-PK对 MPQ4340 来说, MPQ4340 的瞬时反应要比 MPQ4430 的瞬时反应好得多。 这样用户就可以在改进瞬时性能的同时使用较少的输出电容器。
允许非常短的 t通 在使用峰值当前模式控控控的装置中使用峰值当前模式控件的装置中, MPQ4340 最长的 MPQ4340 t通 允许 MPQ4340 将扩大的汽车电池电压(至多18V)直接转换为1.8V,同时切换到AM波段以上并带有频谱(FSS)。
固定频率允许ZDPTM提供极佳频率稳定性。 带有ZDP的装置TM(例如,MPQ4340)也可以与外部时钟同步,也可以与FSS同步使用。TM可用于具有严格的EMC要求的应用,如汽车应用。
Conclusion
PWM(ZDP)TM控制能提高与传统峰值当前模式控制相比的负负瞬时性能,同时在负瞬时保持固定频率。TM从传统的COT控制,它有波动 f 。允许该设备用于高f/SW利用ZDP对MPS产品进行模拟和硬件测试证明了这些效益。
审核编辑:彭菁
-
#硬声创作季 电力电子技术:7.1PWM控制的基本原理--视频Mr_haohao 2022-10-27
-
[7.3.1]--7.1PWM控制的基本原理jf_60701476 2022-11-27
-
PWM控制是如何定义的?2021-05-20 0
-
PWM控制的基本原理是什么2021-10-22 0
-
PWM控制技术2009-05-09 1040
-
PWM控制的基本原理2009-09-09 1015
-
单片机pwm控制基本原理详解2018-02-27 154254
-
PWM的控制技术学习教程免费下载2020-01-09 1097
-
PWM控制的基本原理和控制方法等资料详细说明2020-04-08 2574
-
详解pwm控制基本原理,单片机pwm怎么用?资料下载2021-04-24 825
-
pwm控制的基本原理 pwm是怎么驱动电机的2023-08-29 17342
-
开关电源pwm控制的基本原理2023-09-02 3191
全部0条评论

快来发表一下你的评论吧 !
