

基于PSOC6开发板构建的智能小车
汽车电子
描述
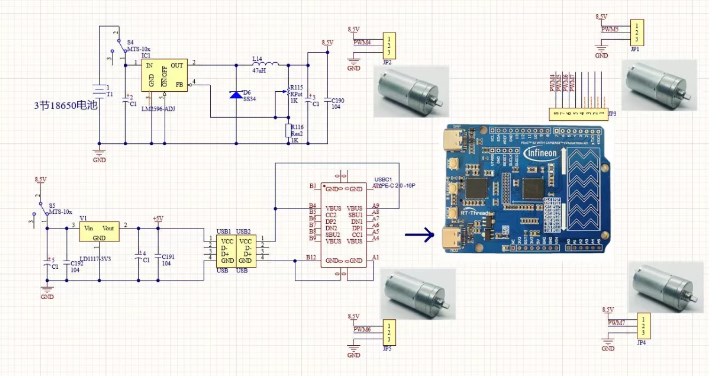
本项目是基于Psoc6-evaluationkit-062S2开发板构建的智能小车。该开发板由RT-Thread与英飞凌联合推出,集成了一颗32位双核CPU子系统,包括150MHz的ARM Cortex-M4F和100MHz的Cortex-M0+,并配备了单周期乘法和存储器保护单元。这使得PSoC6双核芯片的性能得到充分发挥。
该智能小车具备红外自动循迹和姿态监测的功能。通过红外传感器,小车能够根据轨道上的纹理自动跟随线路行驶,实现自动循迹功能。同时,通过集成MPU6050惯性传感器,小车能够实时监测姿态信息,如加速度和角速度,从而确保在运动过程中保持稳定的姿态。
硬件连接图
电机控制与编码器反馈
电机控制
使用rt-thread操作系统能够实现对PSoC6智能小车电机的精确控制,包括速度调节、方向控制等功能。通过定义PWM信号的频率和占空比,可以实现电机的调速控制,并结合PID算法等闭环控制策略,使得小车能够在不同速度下稳定行驶。
编码器反馈
借助rt-thread操作系统,可以实现对电机运动状态的实时监测与反馈。通过编码器获取电机转动的角度和速度信息,并通过rt-thread线程间的通信机制将这些反馈数据传输给控制算法,实现对电机的闭环控制。编码器反馈能够提供准确的位置和运动信息,从而帮助小车实时调整行驶方向与速度。
控制算法优化
在rt-thread操作系统的支持下,可以开发出多种控制算法来优化电机控制与编码器反馈。例如,可以通过调整PID参数来提高电机的响应速度和稳定性,或者使用滤波算法来消除编码器反馈中的噪声。采用rt-thread操作系统,开发过程更加简便,可以快速尝试不同的控制策略,并通过实验结果进行调整和优化,以增强小车的智能度和性能。
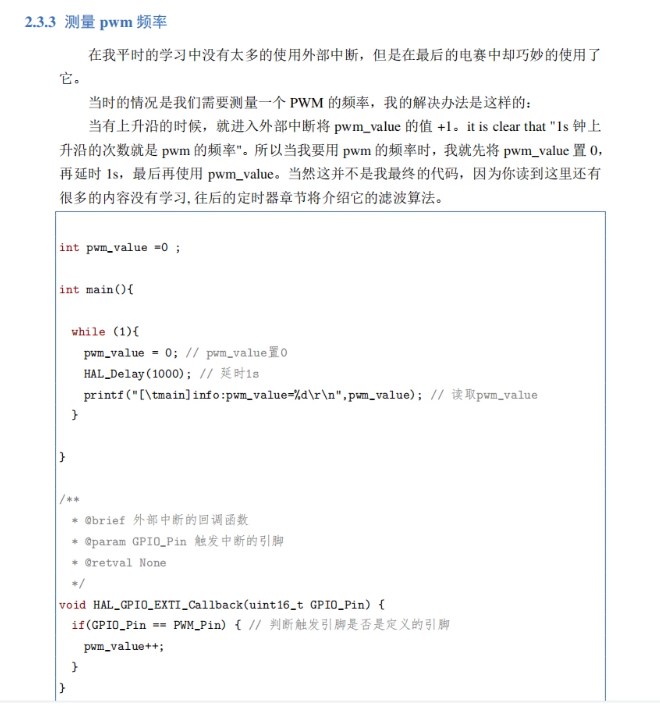
PWM频率测量
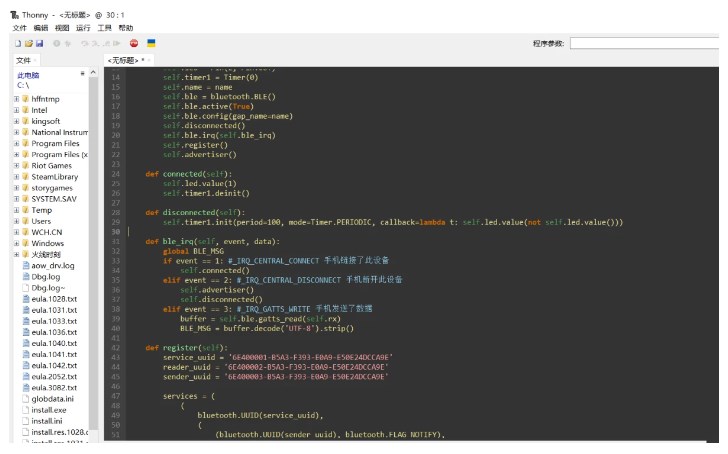
蓝牙通信代码
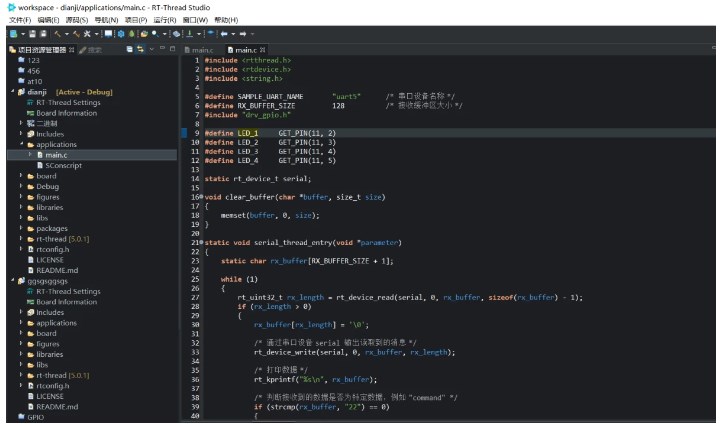
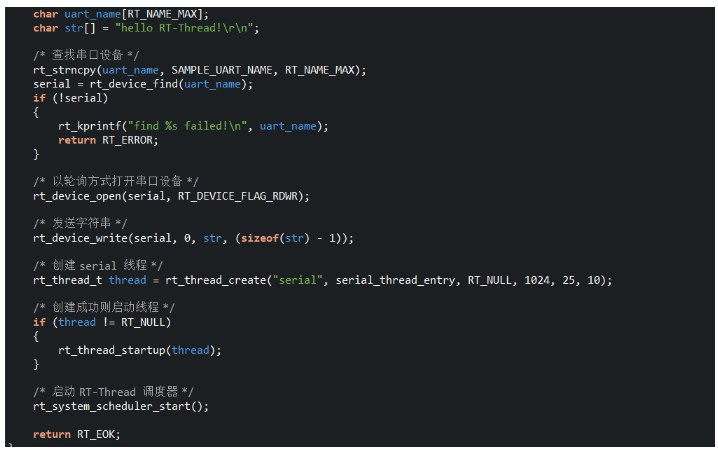
串口通信代码
在优化方面,结合Psoc6-evaluationkit-062S2开发板的双核架构,可以采用PID控制算法来增强自动循迹的稳定性和精确性。此外,可以进行算法优化和并行处理,合理分配任务到不同核心上,提高系统的运行效率和响应能力。还可以考虑功耗优化,利用开发板的低功耗模式来降低小车功耗,延长电池寿命。
综上所述,该项目利用Psoc6-evaluationkit-062S2开发板的强大性能和多种功能,实现了智能小车的红外自动循迹和姿态监测。通过优化设计和算法,提升了小车的性能和稳定性,为智能小车项目的开发与应用提供了强有力的基础。
希望实现功能
基于rt-thread的操作系统
使用rt-thread操作系统作为智能小车的软件平台,实现高效的多任务调度和资源管理,提高系统的稳定性和实时性。
PSoC6芯片的强大性能
借助PSoC6芯片的高性能处理器和丰富的外设资源,实现智能小车的各种功能和算法,如传感器数据采集、图像处理、运动控制等。
多种传感器的综合应用
集成多种传感器,如超声波传感器、红外线传感器、摄像头等,用于感知环境,实现障碍物检测、避障、跟随等智能功能。
网络通信与远程控制
借助网络通信模块,如Wi-Fi、蓝牙等,实现智能小车与手机或电脑的远程通信和控制,用户可以通过APP或网页对小车进行操作和监控。
实时图像处理与视觉导航
通过摄像头采集实时图像,并利用图像处理算法进行物体识别、路径规划等,实现智能小车的视觉导航和图像识别功能。
-
PSoC6 SPI主从通信异常的原因?2024-02-18 0
-
PSoC Creator4.2开发PSoC6如何获取本地的设备地址?2024-02-21 0
-
用PSoC Creator 4.2开发PSoC6,怎么在这个IDE上使用Jlink或者STlink下载程序到开发板?2024-02-21 0
-
按时如何在PSoC6中复用?2018-08-19 0
-
PSOC6 BootLoader2018-09-03 0
-
PSoC6网格支持2018-11-23 0
-
PSoC6中的TCPWM与PSoC 5LP中的PWM相同2018-12-06 0
-
【大联大世平ON Semiconductor BLE5.0 RSL10开发板试用申请】智能门锁项目在on Semiconductor BLE5.0开发板的实现2020-06-30 0
-
PSOC6核心板的资料分享2022-08-15 0
-
PSoC6-CY8CKIT-062S2-43012开发板简介2022-10-14 0
-
【资料下载】英飞凌PSoC 6 RTT物联网开发板2023-04-13 0
-
【英飞凌PSoC 6 RTT开发板试用】+开箱测试2023-06-05 0
-
PSOC6核心板开源分享2022-07-27 433
-
PSOC6的入门案例demo2023-06-07 561
-
使用Psoc6的智能家居概念2023-06-26 216
全部0条评论

快来发表一下你的评论吧 !
