

构建RTOS Kernel指南 (上)
描述
1前言试想与我们相伴的MCU如若只存在裸机程序,那么运行到一个包含延时的线程时,我们的CPU就开始“摸鱼”了。为了最大化运行CPU,就需要用到RTOS(RealTime Operating System). 简单来说,RTOS是一个调度一切可利用的资源完成实时任务,并控制所有实时任务协调一致运行的操作系统,或者说,其内核是一个任务管理的框架。
市面上已存有许多优秀的RTOS,如FreeRTOS、Zephyr、RT-Thread等。许多小伙伴可能在最初接触RTOS时怯于其超厚的配套书籍或其庞大的代码,但不用害怕,像小编一样庖丁解牛般边学习边构建一个自己的RTOS是一个很好的学习方法,让我们踏上RTOS的学习之旅! 
图1 RTOS版本
就好像要盖一座高楼,必然先得考察地势地貌,地基稳固,才能逐渐添砖加瓦。构建一个RTOS也是同样道理,需要知道它运行在一个怎样的架构上,以NXP的RT系列芯片为例,我们需要了解学习ARM Cortex-M系列的架构内容。这是一个非常庞大的体系,这里推荐《ARM Cortex-M3 Cortex-M4权威指南》,是一本不错的参考书籍。下文将列举构建一个RTOS所需要的最为核心的内容。 图2《ARM 图2 Cortex-M3 Cortex-M4权威指南》
图2《ARM 图2 Cortex-M3 Cortex-M4权威指南》
2ARM处理器架构相关内容
2.1 操作模式和状态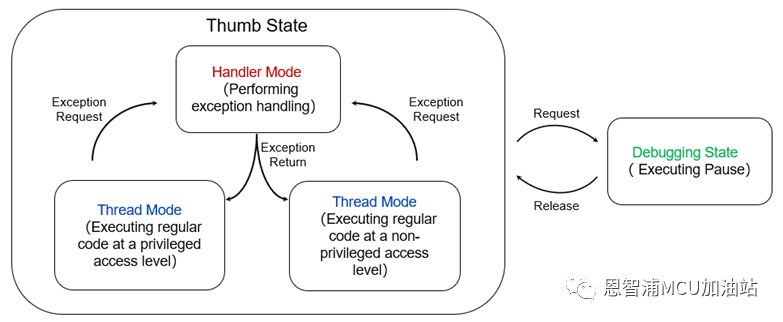 图3操作模式和状态
图3操作模式和状态
Cortex-M系列有两种操作状态和两种模式,并可以区分特权和非特权访问等级。其中调试状态只在连接调试器的时候起作用,若处理器在执行程序代码,则处于Thumb状态,Cortex-M处理器不支持ARM状态,所以ARM状态不存在。
两种模式为处理模式和线程模式:处理模式用作异常处理,并总具有特权访问等级;在执行普通的应用程序代码时,处理器处于线程模式,此时可能处于特权访问等级也可能处于非特权访问等级,前者可向后者切换,但是后者向前者切换则需要借用异常机制。
2.2 寄存器
Cortex-M处理器在内核中具有多个执行数据处理和控制的寄存器,这些寄存器大都以寄存器组的形式进行了分组。以cortex-M4处理器为例,寄存器组中有16个寄存器。
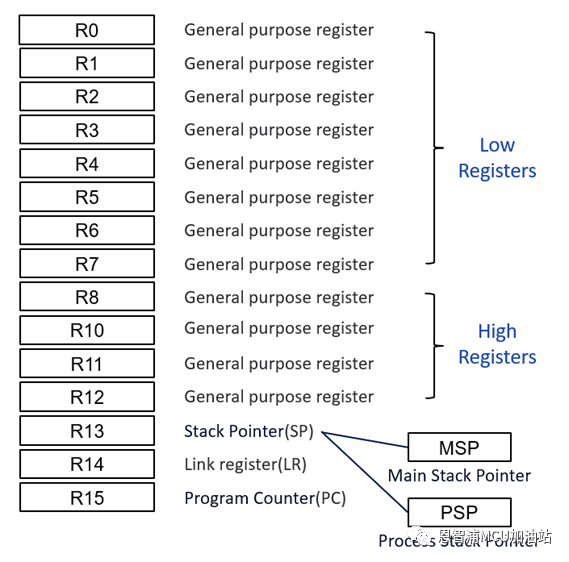 图4 寄存器组中寄存器其中R0-R12为通用寄存器,R13为栈指针,用于实现栈存储的访问。物理上存在两个栈指针:主栈指针(MSP)用于处理模式,以及进程栈指针(PSP)只能用于线程模式。R14也被称为链接寄存器,用于函数或子程序调用时返回地址的保存。R15为程序计数器。除了寄存器组中的寄存器之外,处理器中还存在多个特殊的寄存器。下面为几个较为典型的特殊寄存器:
图4 寄存器组中寄存器其中R0-R12为通用寄存器,R13为栈指针,用于实现栈存储的访问。物理上存在两个栈指针:主栈指针(MSP)用于处理模式,以及进程栈指针(PSP)只能用于线程模式。R14也被称为链接寄存器,用于函数或子程序调用时返回地址的保存。R15为程序计数器。除了寄存器组中的寄存器之外,处理器中还存在多个特殊的寄存器。下面为几个较为典型的特殊寄存器: 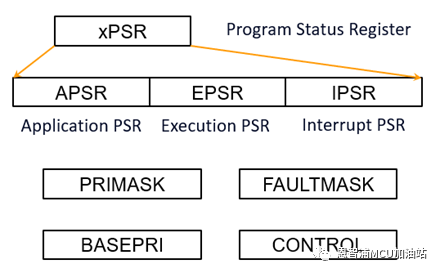 图5 特殊寄存器
其中,程序状态寄存器包含三个状态寄存器,用于保存处理的状态信息。PRIMASK、FAULTMASK、BASEPRI寄存器都用于异常或中断屏蔽,CONTROL寄存器则用于栈指针的选择和线程模式的访问等级。
图5 特殊寄存器
其中,程序状态寄存器包含三个状态寄存器,用于保存处理的状态信息。PRIMASK、FAULTMASK、BASEPRI寄存器都用于异常或中断屏蔽,CONTROL寄存器则用于栈指针的选择和线程模式的访问等级。
2.3 向量表和系统控制块
当Cortex-M处理器接受了某种异常请求后,处理器需要确定该异常处理的起始地址,该信息位于存储器内的向量表中。构建RTOS用到的最为核心的异常为PendSV,其优先级最低,可以被其他中断打断,因此通常用作上下文的切换,也就是任务的切换。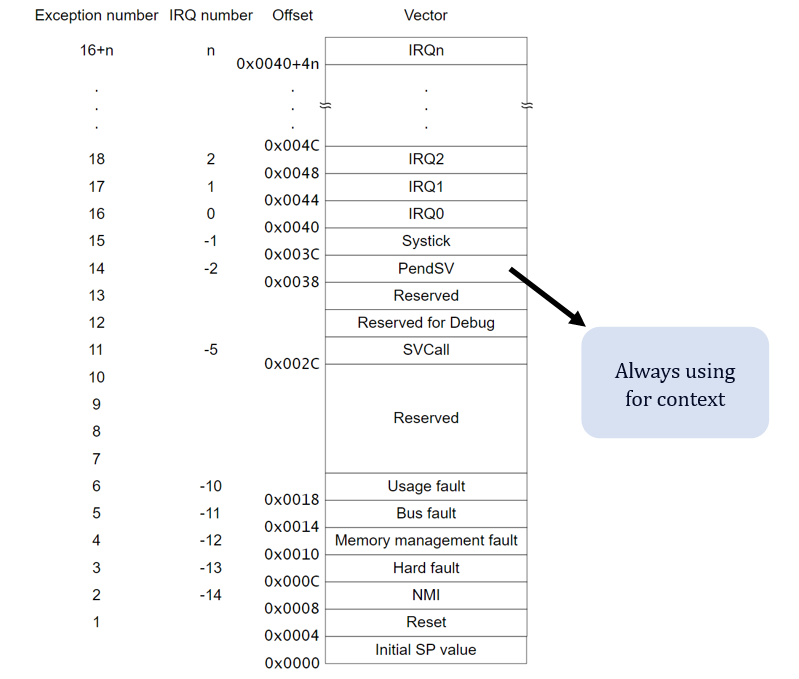 图6 中断向量表
图6 中断向量表
系统控制块(SCB)中包含了若干用于中断控制的寄存器,其中有一个与RTOS密切相关的为中断控制和状态寄存器(ICSR),通过将第28位进行使能操作,可以触发我们需要的PendSV中断异常。
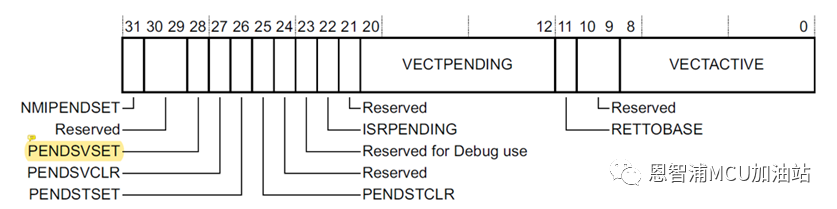 图7 中断控制和状态寄存器(ICSR)
图7 中断控制和状态寄存器(ICSR)
3任务切换的实现
上述背景知识是为构建RTOS而提炼的内容,作者在这里建议在开发学习过程中带着疑问前进,边学习边扩展。下面就可以对RTOS的最基本功能——任务切换进行实现。首先我们需要知道,不同于裸机程序,RTOS的每个任务都有独立的上下文环境,在发生任务切换时,需对每个任务的状态数据进行保存,那么需要为每个任务配备有独立的栈空间。
当触发任务切换时,需要首先暂停当前任务的执行,并保存当前任务的状态数据到任务对应的栈空间,再将栈指针更新到切换的目标任务的栈空间,最后从该栈空间中恢复其状态数据,至此完成了任务的切换。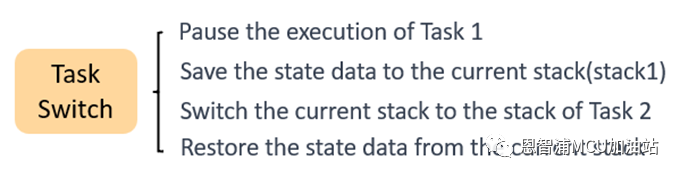 图8 任务切换的步骤
图8 任务切换的步骤
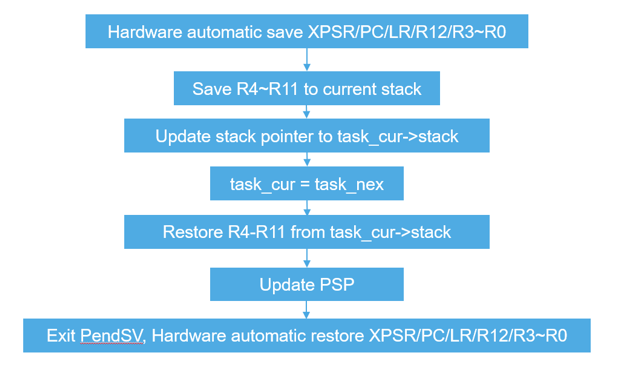 图9 上下文切换的流程
图9 上下文切换的流程
END
更多恩智浦AI-IoT市场和产品信息,邀您同时关注“NXP客栈”微信公众号

NXP客栈
恩智浦致力于打造安全的连接和基础设施解决方案,为智慧生活保驾护航。
长按二维码,关注我们
恩智浦MCU加油站
这是由恩智浦官方运营的公众号,着重为您推荐恩智浦MCU的产品信息、开发技巧、教程文档、培训课程等内容。

长按二维码,关注我们
原文标题:构建RTOS Kernel指南 (上)
文章出处:【微信公众号:恩智浦MCU加油站】欢迎添加关注!文章转载请注明出处。
-
使用XUPV5 LX110T板怎么构建RTOS?2019-08-28 0
-
kernel_liteos_a:揭开神秘的面纱!2021-04-23 0
-
怎样在Rockchip上获取并构建Kernel呢2022-04-21 0
-
手动安装了3.1.3,keil5选择RTOS时找不到kernel这是为什么2022-09-13 0
-
T-Kernel在Blackfin处理器上的移植分析2009-09-09 565
-
T-Kernel对应新硬件的实施指南2011-04-05 531
-
Using the FreeRTOS Real Time Kernel2016-07-13 863
-
SYS_BIOS (TI-RTOS Kernel) v6.46 User's Guide2016-10-31 1204
-
SYSBIOS (TI-RTOS Kernel) v6.40用户指南2018-04-13 1027
-
GR-MANGO 快速入门指南的 RZ/A2M Azure RTOS 包2023-01-13 192
-
YRDKRX62N 快速入门指南(NO-RTOS)2023-04-12 125
-
城市指南设备构建2023-07-11 127
-
构建RTOS Kernel指南 (下)2023-08-03 253
全部0条评论

快来发表一下你的评论吧 !
