

发那科机器人针对奇异点的处理方法
机器人
描述
在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。以下姿态即为奇异点位置。
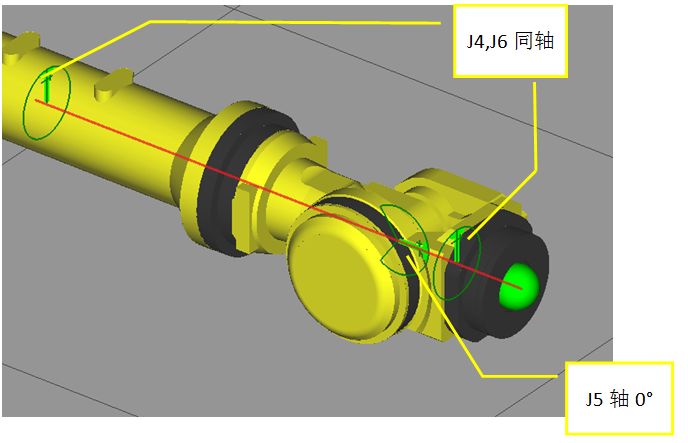
图1 机器人奇异点位置
当机器人J5轴处于0°位置,机器人会出现MOTN-023报警:

图2 MOTN-023报警
当机器人在执行动作类型为L,C,A的动作指令时,如需经过奇异点,机器人会出现MOTN-063报警

图3 MOTN-063报警
针对奇异点的处理方法
情况一:在机器人示教时遇到奇异点
处理步骤:
a) 将机器人的示教坐标系切换到关节
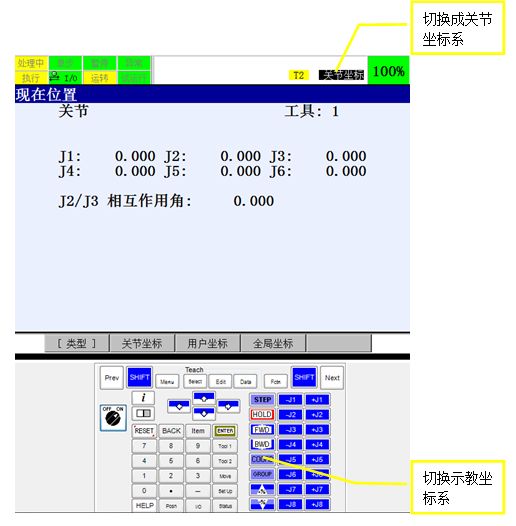
图2 示教坐标系的切换
b) 点动机器人,让J5轴调离0°的位置,建议小于-3°或者大于3°
c) 按RESET键复位报警
情况二:在程序运行时遇到奇异点
方法一:适合在无精细点位要求使用。
当运行程序时遇到奇异点,可以将该行动作指令的动作类型改为 J,或者修改机器人的位置姿态,以避开路径当中存在的奇异点。
方法二:适合在有精细点位要求使用。
在动作指令后添加附加动作指令:手腕关节动作指令WJNT(全名Wrist Joint)。
手腕关节动作指令(Wrist Joint),不在轨迹控制中对手腕的姿势进行控制(标准设定下,程序运行时,手腕的姿势始终被控制)。在直线动作、C圆弧动作、A圆弧动作时能够使用该指令。
当遇到奇异点时,程序中使用该指令,手腕的姿势在动作中发生变化,避开奇异点造成的手腕轴反转动作,使得工具中心点继续沿着轨迹动作。
处理步骤:
a) 将光标移至出现奇异点程序行行末,点击F4选择
b) 选择Wrist Joint
c) 按RESET键复位报警
d) 运行程序,观察运行轨迹
编辑:黄飞
-
#机器人编程 #PLC 发那科机器人程序的复制和粘贴.学习电子知识 2022-10-25
-
发那科机器人搬运程序实例2016-01-05 0
-
发那科机器人伺服电机维修2020-08-14 0
-
发那科2000iB机器人焊接时出现焊点整体偏移故障维修2020-09-07 0
-
大量回收全新西门子交换机和发那科机器人配件成套系统模块2020-09-24 0
-
青岛发那科机器人SERVO-062伺服报警故障维修2020-10-12 0
-
常年回收发那科机器人配件产品;回收发那科成套系统模块 回收伺服驱动器2020-10-26 0
-
求购发那科机器人配件;发那科伺服驱动器/全套系统模块高价上门回收2020-10-29 0
-
本人大量回收发那科机器人伺服电机收购发那科驱动器发那科整套系统2020-11-04 0
-
上海长期回收发那科伺服控制器模块 发那科机器人配件模块2021-07-19 0
-
发那科机器人系统回收 发那科机器人配件常年高价回收2021-07-19 0
-
回收发那科放大器,回收发那科机器人,回收发那科CPU2021-07-27 0
-
回收发那科机器人数控配件,回收发那科数控机器人2021-07-27 0
-
回收发那科伺服放大器发那科机器人数控配件发那科数控机器人配件发那科编码器发那科显卡2022-03-02 0
-
profinet转ethernet网关连接发那科机器人配置案例2023-08-03 0
全部0条评论

快来发表一下你的评论吧 !
