

永宏FBs系列PLC的RS485通讯方式介绍
工业控制
描述
本项目为弯管机设备改造工程,在不破坏设备原有的功能的情况下通过只更换设备原来的永宏PLC,使弯管机能够与埃斯顿机器人进行信号交互,通过机器人对弯管机进行上料、下料动作,即节约了人工成本,又提高了生产效率。
本文所述内容为两台永宏FBs系列PLC的RS485通讯方式。
永宏PLC
两台PLC型号为FBS-44MN。
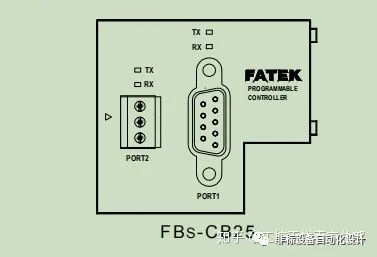
FBs-CB25通讯扩展板
两个FBs-CB25通讯扩展板。每个FBs-CB25通讯扩展板有两个通讯端口,一个为Port1(RS232),另一个为Port2(RS485)。
PLC编程软件
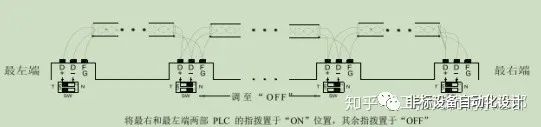
FBs-CB25通讯板RS485接线方式
传输线的质量,对传输信影响极大,质量不佳的双绞线在传输速率高时的信号衰减极大,传输距离将大幅缩短,且其噪声免疫力较差,易受噪声干扰。因此需要使用具有外层屏蔽被覆的双绞线。
传输线必须由第一站接至第二站,再由第二站接至第三站,依次逐一接至最后一站。
每个通讯扩展板中都有一组终端电阻,在RS485通讯架构中需要将最左侧及最右侧的两个PLC的终端电阻开关调至”0N”的位置上(出厂时是置于"OFF"位置),两侧间的所有PLC的终端电阻需置于“OFF”位置。
编辑PLC参数与程序
PLC参数
设定通讯协议
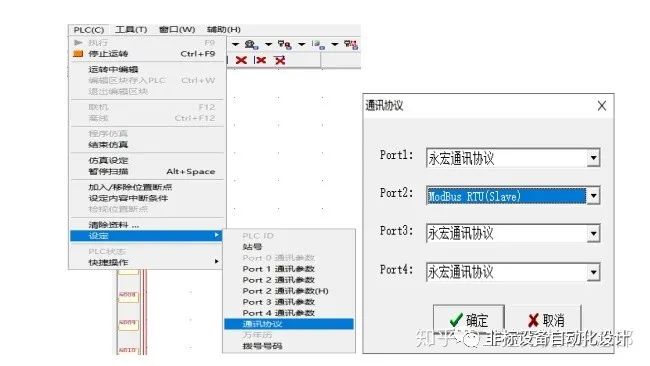

首先设定两台永宏PLC的“Port2通讯口的通讯协议”,此处选择“ModBus RTU”。
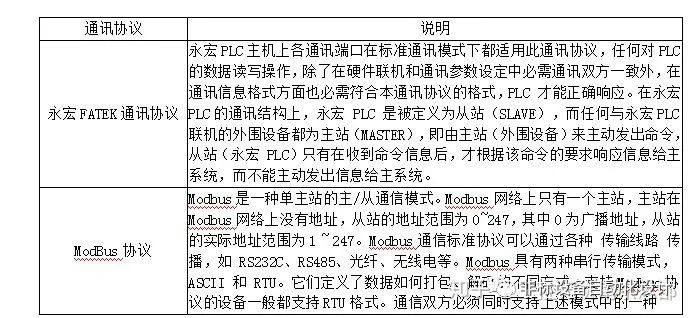
永宏FBs系列PLC有三种通讯协议:永宏FATEK通讯协议、ModBus 协议,以及自由口通讯协议。用户可根据不同的智能终端来选择通讯端口的通讯协议。
通讯协议
说明
永宏FATEK通讯协议
永宏PLC主机上各通讯端口在标准通讯模式下都适用此通讯协议,任何对PLC的数据读写操作,除了在硬件联机和通讯参数设定中必需通讯双方一致外,在通讯信息格式方面也必需符合本通讯协议的格式,PLC 才能正确响应。在永宏PLC的通讯结构上,永宏 PLC 是被定义为从站(SLAVE),而任何与永宏PLC联机的外围设备都为主站(MASTER),即由主站(外围设备)来主动发出命令,从站(永宏 PLC)只有在收到命令信息后,才根据该命令的要求响应信息给主系统,而不能主动发出信息给主系统。
ModBus协议
Modbus是一种单主站的主/从通信模式。Modbus网络上只有一个主站,主站在 Modbus网络上没有地址,从站的地址范围为0~247,其中0为广播地址,从站的实际地址范围为1 ~ 247。Modbus通信标准协议可以通过各种 传输线路 传播,如 RS232C、RS485、光纤、无线电等。Modbus具有两种串行传输模式,ASCII 和 RTU。它们定义了数据如何打包、解码的不同方式。支持Modbus协议的设备一般都支持RTU格式。通信双方必须同时支持上述模式中的一种
自由口通讯协议
所谓自由通讯协议,永宏 PLC 作为主站,根据通讯的从站设备通讯格式来编写通讯传输数据格式,以保证通讯格式的一致性。在符合从站设备的数据格式时设备才能识别主站发送出来的命令要求,再根据命 令来进行处理数据、做响应回复等工作。这样将大大提高 PLC 控制对象的通讯接口兼容。
设定通讯参数
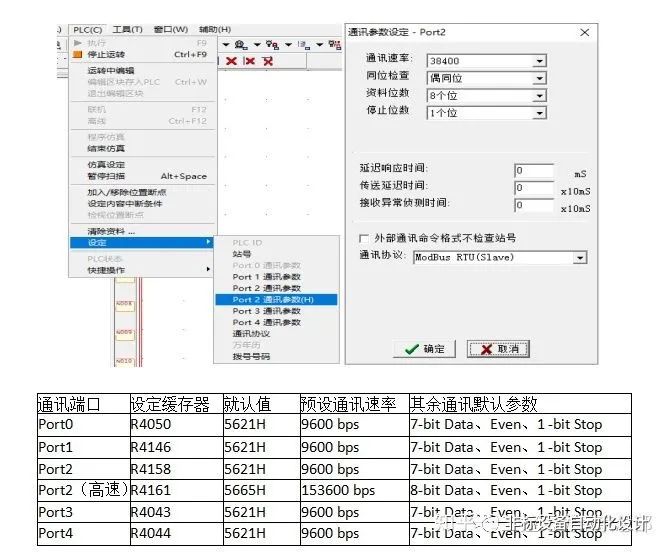
通讯端口
设定缓存器
就认值
预设通讯速率
其余通讯默认参数
Port0
R4050
5621H
9600 bps
7-bit Data、Even、1 -bit Stop
Port1
R4146
5621H
9600 bps
7-bit Data、Even、1 -bit Stop
Port2
R4158
5621H
9600 bps
7-bit Data、Even、1 -bit Stop
Port2(高速)
R4161
5665H
153600 bps
8-bit Data、Even、1 -bit Stop
Port3
R4043
5621H
9600 bps
7-bit Data、Even、1 -bit Stop
Port4
R4044
5621H
9600 bps
7-bit Data、Even、1 -bit Stop
因为本项目的通讯端口为“Port2”,所以要对“Port2”端口进行设置。Port2通讯参数的设定有“Port2通讯参数”和“Port2通讯参数(H)”两种方式,由于弯管机生产节拍要求较高、其中PLC间的通讯还涉及到了数据的传递,因此选择“Port2通讯参数(H)”这种方式,在设定其通迅速率时必须≥38400。
延迟响应时间:PLC接收到通讯命令并处理后,会等到延迟响应时间到,才会响应该笔通讯命令。
传送延时时间:当PLC的通讯Port有使用FUN150(M-BUS)或FUN151(CLINK)当作ModBus或Fatek通讯网络的Master时,可设定下笔通讯命令要等到传送延迟时间到,才发送出去。
接收异常侦测时间:
1、当PLC的通讯Port设定为ModBus RTU通讯协议时,系统会以内定的接收间隔时间来区分每笔通讯命令,如果系统内定值会造成偶有通讯不良情况时,可将M1956设定为1,并设定R4148的高字节用来改善通讯不良现象。
2、当PLC的通讯Port有使用FUN151(CLINK)来与外界外围作通讯联机时,如通讯协议本身并无结束码来当作每一笔通讯讯息的区分,则R4148的高字节用来当作判断新讯息的接收间隔时间。
设定PLC站号
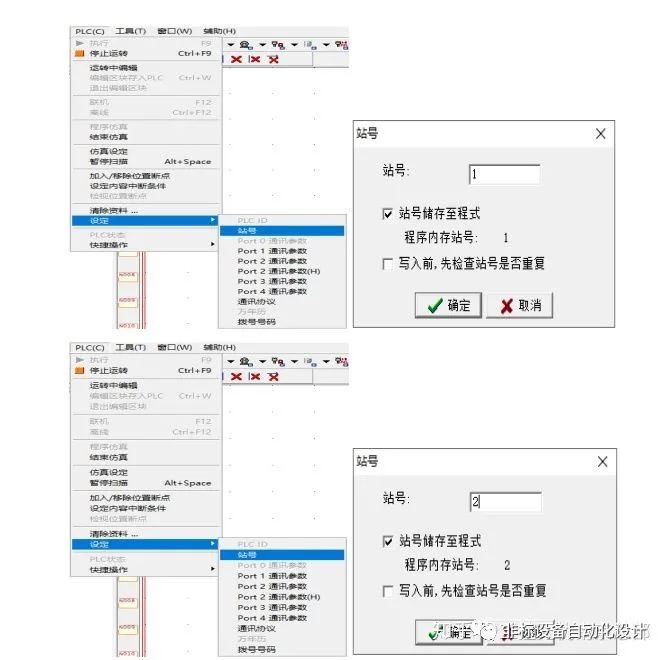
因为本项目同用到了两个FBs系列的PLC所以在进行通讯站号设置时站号要依序设置,不能重复。
PLC程序编辑
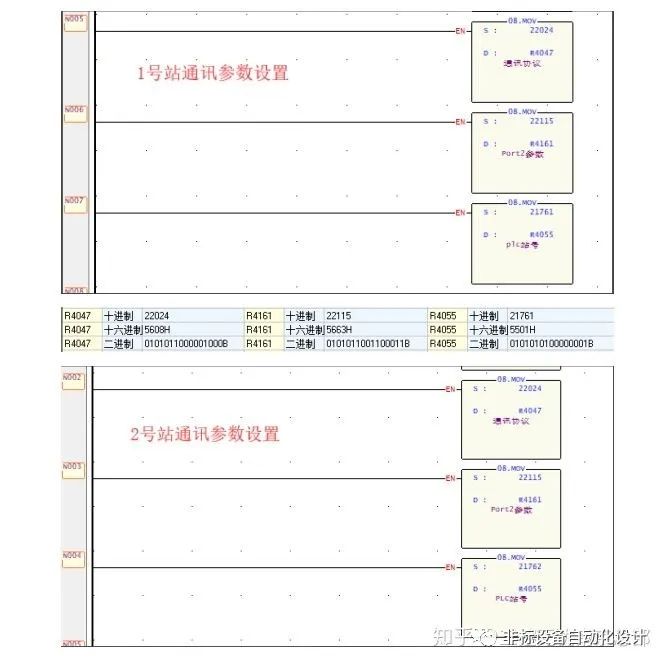
R4047:Port1~Port4通讯协议设定(设定Port1~Port4为FATEK或为Modbus RTU通讯协议)。
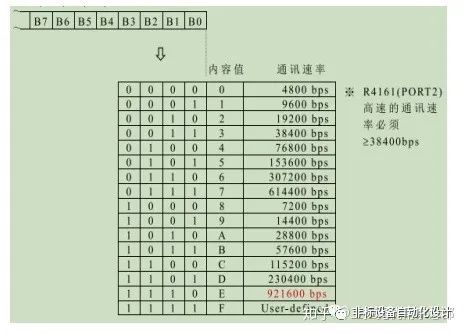
R4161:定义通讯端口2通讯参数(高速CPU LINK)。
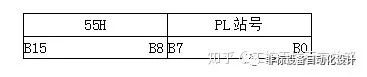
R4055:PLC站号显示或设定(当缓存器高字节不等于55H时,R4055之内容显示此PLC之站号;当缓存器R4055高字节等于55H时,R4055之低字节用来设此PLC之站号)。
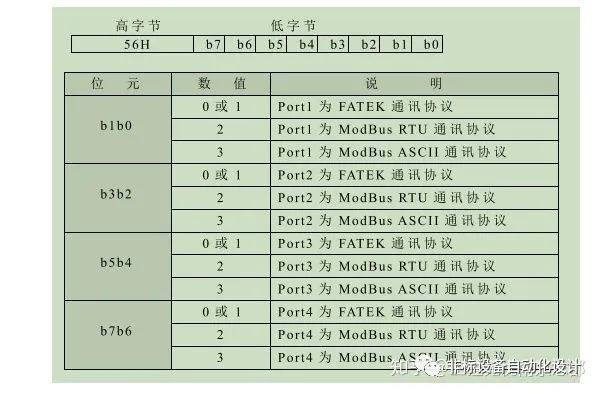
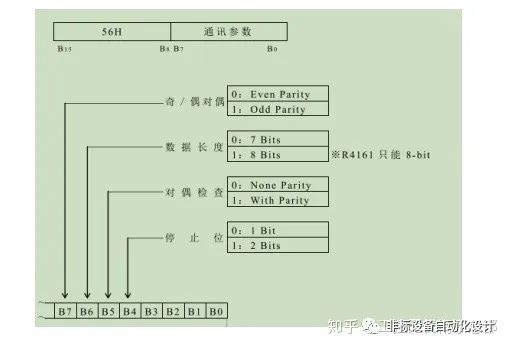
R4047:(高字节) =56H.规划通讯端口为ModBus RTU/ModBus ASCII通讯协议界面
=其他值,无上述的功能(预设为FATEK通讯协议)
(低字节) =Port1〜4, FATEK/ModBus RTU/ModBus ASCII 通讯协议。
R4047的格式如下图所示:
R4161的格式如下图所示:
R4055的格式如下所示:
通用性总结
在本项目中,使用永宏PLC-FBs系列的PLC在进行RS485通讯时可根据现场的情况合理的设置通讯参数,在编写PLC程序时要仔细,如果在进行3台PLC通讯时,除了PLC站号外,其余的参数设置需要设置一样,永宏PLC在设置完成通讯参数后仍然需要在程序中编写“参数程序”由于两台PLC通讯之间还需要数据传递等功能,在编写“ModBus Master表格”的时候需要注意到表格中的数据格式以及内容长度都会对通许速率有影响。
审核编辑:刘清
-
PLC通讯控制系统(04):RS485通讯常用接线方式讲解#硬声创作季电子学习 2022-11-16
-
RS485通讯接口及其应用2012-08-06 0
-
RS485通讯的理论和实践2012-08-20 0
-
RS485通讯标准2014-07-11 0
-
RS485通讯芯片的应用行业介绍2017-08-30 0
-
RS485通讯接口芯片介绍及选型要点2018-03-30 0
-
请问USB和RS485通讯能互转吗?2019-04-09 0
-
RS485芯片/RS485通讯芯片/RS485通讯接口芯片UN3485 精选资料分享2021-07-23 0
-
变频器RS485通讯协议概述2021-09-07 0
-
串行口RS485通讯协议概述2021-09-09 0
-
如何使用CAN通讯与RS485通讯去控制电机2021-10-08 0
-
RS485通讯的注意事项:2023-05-24 0
-
rs485通讯协议2015-08-13 21126
-
RS485通讯的方式2020-07-23 11114
全部0条评论

快来发表一下你的评论吧 !
