

CAN总线的基本结构组成?为什么CAN总线会应用于汽车行业?
汽车电子
描述
关于CAN总线,其特点如下:
• 它使用一对双绞线电缆。
• 可在同一个CAN 总线上可以连接多个ECU。
• 减少了重量和电线成本。
• 减少了错误的发生。
• 可快速交换数据。其使用仲裁过程,因此最高优先级的数据可获得总线的访问权。
• 提升了应用范围。
• 标准的CAN 2.0允许11位的数据传输(这意味着,总共可以引入2048条不同的独特信息)。
• 扩展的CAN 2.0允许29位数据传输。(高达536亿多条信息)。
CAN 总线的基本结构
基本的CAN 总线布局只包括两根在两端终止的双绞线。ECU 或任何需要通信的系统都可以连接到这些导线上,因此可以满足任何数量的ECU 去连接。
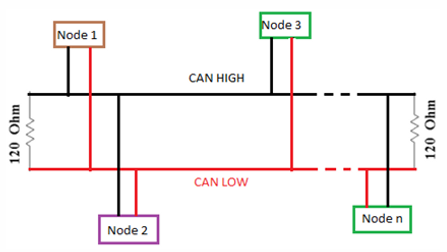
图中显示了一个CAN 总线的常规布局
CAN 总线遵循一个简单的原则,即向每个愿意下载的人提供数据。这就像在一个地铁站里,在不同的时间有各种公告,对于那些把这些数据视为重要信息的人来说,他们会采取行动,而其他人则会忽略这些数据。类似地,总线为线路上的每个节点提供了数据,发现它有用的节点接受它,其余的节点则忽略它。在总线上,数据是在优先级的基础上工作,而节点的功能也类似。从技术上讲,不存在主从调整,即这里的每个节点都是一个主站节点。

电压水平:标准的CAN 总线工作在5V 的差分信号上。
一个理想的 0 标志着传输的显性模式,而一个完美的 1 标志着传输的隐性模式。另外,显性模式和隐性模式的安排决定了数据总线的情况。显性状态永远高于隐性状态。
标准CAN总线中的数据帧结构(11位)


• 帧起始(SOF):即帧的开始,标志着数据帧的开始(一个显性0)。
• 地址字段(ADDRESS FIELD):该字段决定数据的优先级。地址越低,其优先级越高,显性0数量最多的地址将拥有最高的优先权,此外,没有两个节点可以同时传输相同的信息地址。
• 远程发送请求位(RTR):远程传输请求用于向节点请求数据,这些节点不需要连续发送数据。当任何节点希望与另一个特定的节点进行通信,就可以使用这个方法;这将直接减少了总线上的拥堵,因为节点之间进行直接通信。
• 仲裁段(ARBITRATION FIELD):仲裁过程是帮助决定哪一个节点在给定的时间点上扮演主人的角色。当另一个节点传输逻辑0时,任一节点传输一个逻辑1,就会退出或失去仲裁。这意味着传输第一个 1 的节点失去了仲裁,占优势的 0 总是获胜。仲裁失败的节点重新排队等待其信息的重新传输,帧位流继续无差错地传输,直到只剩下一个节点在传输。
• 扩展标识符位(IDE):识别符扩展位,用于扩展或以后使用。一个隐性的IDE将引出另外 18 位的地址。
• 储备位(RSRV):顾名思义,它是为将来的升级而保留的。
• DLC:数据长度代码(0-8字节)。
• 数据(DATA)。用户定义的数据(0-64 位)。
• 循环校验段(CRC):循环冗余检查,用于检测错误以及数据是否损坏。
• 确认段(ACK):接收端的确认。
• 帧结束(EOF):帧结束(7位隐性1s)。
在这里,人们需要理解的是,无论优先级顺序如何,每一个节点都会得到它的信息。
为什么CAN 总线会应用于汽车行业
CAN 总线最开始是为汽车发明的。在此之前,车辆中的每个电子设备都是用电线与其他设备连接的,当需要连接的设备系统数量较少时, 这可能很方便,但是随着复杂性的不断增加, 电线根本不可能实现连接。
因此,CAN 总线是专门为支持和实现汽车的高速和高效通信而开发的。
使用控制器区域网络即CAN 总线,每个ECU 可以与其他所有ECU 进行通信,并且无需复杂的专用布线,从而减少了电缆长度、成本以及由于不必要的布线而导致的车辆重量。在Influx,我们致力于创造值得信赖的与众不同的工程数据以及汽车数据记录解决方案,专注于CAN 总线数据记录仪,CAN 总线仪表模块,CAN 总线软件工具。
而CAN 作为一个强大的车辆总线标准,在没有主机的情况下也允许微控制器和设备的应用可以相互通信。
使用CAN 总线也会存在几个缺点:
• CAN 总线的电线最长为40米。因此节点的数量也限制在一个点上
• CAN 总线与其他网络相比要贵一些,所以其故障排除和维护的成本很高。
-
汽车行业使用最为广泛的CAN总线是如何发展起来的呢?#can总线北汇信息POLELINK 2023-04-28
-
汽车电子CAN总线的测试规范2015-08-19 0
-
汽车CAN总线系统原理、设计与应用2018-04-09 0
-
详解汽车CAN总线2019-07-26 0
-
怎么设计多通道实时CAN总线模拟器?2019-08-13 0
-
STM32的CAN总线协议2021-08-19 0
-
STM32F103 CAN总线配置与通信学习记录2021-08-20 0
-
CAN总线应用—汽车领域2011-12-14 812
-
CAN总线原理,CAN总线的8个特点2020-11-02 34713
-
深耕CAN总线领域40余年,克萨(Kvaser)满足汽车行业多维度需求2023-03-24 557
-
can总线为什么要用双绞线?can总线不用双绞线可以吗?2023-09-14 4164
-
虹科CiA演讲回顾 | CAN(FD)总线协议转换原理及其在汽车行业的应用2023-09-21 412
-
基于CAN总线在汽车行驶记录仪中的应用2023-10-18 99
-
can总线传输距离2023-12-07 1906
-
CAN转串口转换器在汽车行业中的应用场景2024-02-20 845
全部0条评论

快来发表一下你的评论吧 !
