

用于可穿戴无人机控制系统的仿生多功能水凝胶基电子皮肤
描述
重建具有表皮和真皮功能的人类皮肤与物理世界互动的需求巨大。近期,西北工业大学苑伟政、北京大学张海霞、中山大学吴进合作提出了一种仿生、超灵敏、多功能的水凝胶基电子皮肤(BHES)。它的表皮功能是使用具有纳米级皱纹的聚对苯二甲酸乙二醇酯模拟的,通过接触带电过程中获得/失去电子的能力,能够准确识别材料。内部机械感受器由具有粘滑传感能力的叉指银电极模拟,以识别纹理/粗糙度。
通过图案化的微锥水凝胶模拟真皮功能,实现了具有高灵敏度(17.32 mV/Pa)、大压力范围(20 Pa ~ 5000 Pa)、低检测限和快速响应(10 ms)/恢复时间(17 ms)的压力传感器。在深度学习的辅助下,该BHES在识别材料(10种材料为95%)和纹理(四种粗糙度情况下为97.20%)方面实现了高精度并最大限度地减少了干扰。通过集成信号采集/处理电路,展示了具有三自由度运动的可穿戴无人机控制系统,以及软机器人在数字孪生的自供电人机交互界面的巨大潜力。该研究以“Deep-Learning Enabled Active Biomimetic Multifunctional Hydrogel Electronic Skin”为题发表在ACS Nano期刊上。
仿生人造皮肤的设计
该工作提出了一种仿生、超灵敏、多功能的水凝胶电子皮肤,并将纳米级皱纹图案PET和微锥图案DN水凝胶引入BHES。这种BHES可以连续地将微小的机械刺激转换为电信号。如图1所示,所提出的e-skin主要由多层结构组成,即顶层的纳米级皱纹图案PET,夹在PET和聚酰亚胺(PI)之间的叉指银电极,抗脱水和防冻微锥图案DN水凝胶电极和聚二甲基硅氧烷(PDMS)基底。使用纳米级皱纹图案PET模拟表皮,可以根据各种材料在接触带电过程中获得或失去电子的不同能力准确识别材料类型。内部机械感受器使用叉指银电极进行模拟,以基于粘滑传感机制识别材料纹理。
此外,作为真皮的对应物,水凝胶使制造的电子皮肤柔软而有弹性,它还可以用作流体储存器和缓冲器。BHES不仅可以用于确定接触材料的类型,还可以精确检测压力刺激。此外,BHES通过增加信号处理电路可以实现实时手势检测和便捷的无人机控制操作,在可穿戴电子和交互式人机界面方面具有巨大的应用前景。在人工智能的帮助下,BHES可以赋予机器人手压力检测和材料/纹理识别能力,为软机器人在数字孪生和BHES的元宇宙应用中的成功应用而开发。
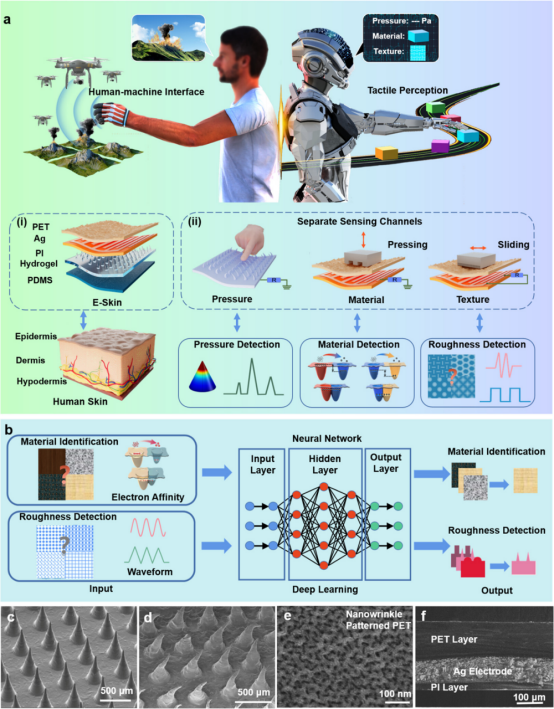
图1 BHES的结构设计
具有多种突出性质的水凝胶的表征
透明聚丙烯酰胺(PAM)/海藻酸钙(CA)DN水凝胶使用简单的聚合工艺合成。DN水凝胶的后处理是通过将原始DN水凝胶浸入50 wt%溴化锂(LiBr)溶液中以引入吸湿性LiBr来进行的,赋予其抗脱水和抗冷冻能力。处理过的DN水凝胶保持更高的残留质量,比未经处理的原始水凝胶具有更好的抗脱水性能。水凝胶优异的耐冻性和耐干燥性应归功于LiBr的强水化作用,因为形成稳定的Li-H⁺₂O 和 Br⁻-H₂O簇抑制水分子的冻结和蒸发。此外,制备的水凝胶还显示出高透明度,这对于具有美学和可见性要求的可穿戴电子产品非常有用。开发的水凝胶在压制和释放超过1000次时显示出稳定的产量,显示出其长期应用的巨大潜力。
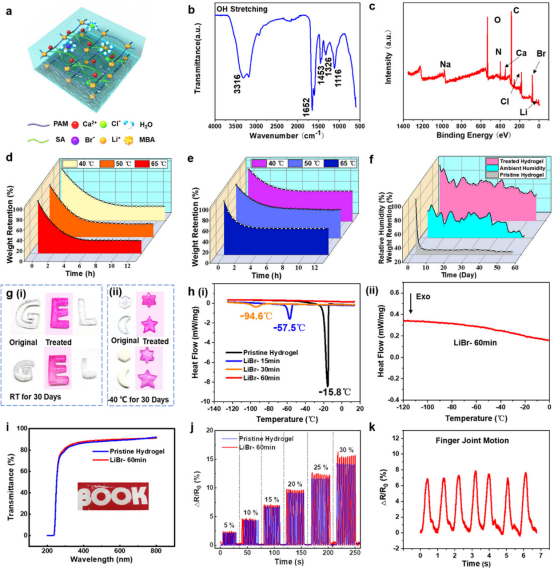
图2 表征水凝胶的各种优异性能
接触材料-高灵敏度的无干扰压力传感
如上所述,DN水凝胶已经取得了许多优异的性能。因此,将微锥图案化水凝胶用作BHES的导电电极和带电层,以构成自供电压力传感模块。结果表明传感器具有出色的抵抗接触材料干扰的能力。BHES在2 kPa左右压力下显示了快速响应(10 ms)和恢复(17 ms)时间,明显快于人体皮肤(30 ms ~ 50 ms)。重要的是,微锥图案BHES的灵敏度达到17.32 mV/ Pa,几乎是非结构化BHES的两倍。这主要是由于微锥图案结构在变形过程中更容易变形,有效地扩大了接触面积。此外,还检查了功率密度对具有和不具有微锥结构的器件的外部负载电阻的依赖性。在所有测量的外部电阻范围内,微锥图案BHES的输出电压比普通器件的输出电压高得多。BHES可以在-27°C和65°C的温度下输出稳定的电压信号。经过1000次循环压释放试验后,最大电压没有明显下降,有助于其在不同环境下的进一步长期应用。
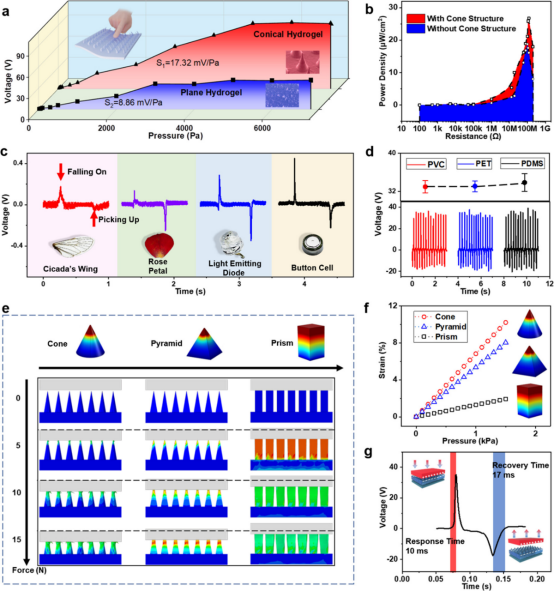
图3 所提出的BHES压力传感模块的表征
压力无扰动精确材料和纹理识别
识别不同类型的材料被认为是人体皮肤的关键功能之一。然而,使用电子皮肤来正确识别具有相同光滑表面的材料是一个巨大的挑战。由于接触带电和粘滑机制的产生,本研究中的人造电子皮肤可以超越人类皮肤的能力,并借助深度学习技术实现精确的材料和纹理识别。该研究选取铝、铜、纸、砂纸、化学胶、硅橡胶、PI、PVC和PDMS等10种不同材料,以及氟化乙丙烯(FEP)和4个不同粗糙度值的铣削碳钢样品,验证了BHES的材料种类和表面粗糙度识别能力。当另一个物体在这个粗糙的表面上滑动时,会产生摩擦力和移动速度的波动。这些不规则的运动会导致传感信号的波动,这些波动被用作识别不同纹理特征的原理。受天然人体皮肤皱纹表面的启发,引入纳米级皱纹PET与被触摸物体构成摩擦对,并通过粘滑机制辅助纹理识别。在这项研究中,材料识别的平均准确率可以达到95.00%,BHES的材料感知功能有助于架起物理世界和网络世界的桥梁;因此,这项工作可以针对数字孪生和元宇宙领域的软机器人进行开发。
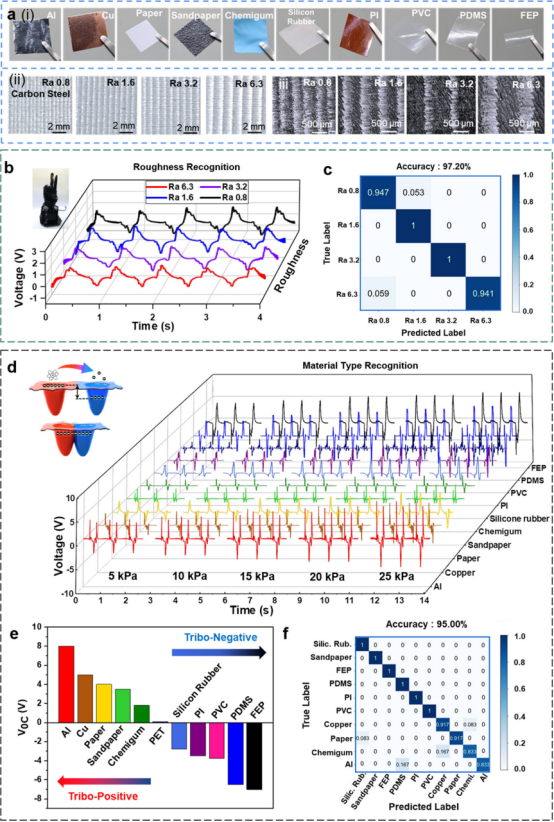
图4 材料和粗糙度识别过程和结果
BHES-集成无人机控制系统
手势是一种高效的沟通媒介,特别是对于需要无声换向的反恐场景。因此,将人体皮肤启发的BHES与信号采集和无线信号传输电路相结合,该研究开发了一种无人机控制系统,展示了其在反恐事件中的巨大潜力。BHES检测到人的手部动作,并将数据传输到电输出信号以操纵无人机。所提出的BHES已成功用于调节人机交互界面应用的四旋翼飞行器。此外,还总结了可以检测压力、识别材料或辅助无人机控制的电子皮肤的当前发展情况。通过比较,所提出的BHES展示了在功能和传感性能方面的出色特性。此外,BHES在快速灵敏的压力传感以及无需外部电源即可准确识别材料和纹理方面也显示出优势。
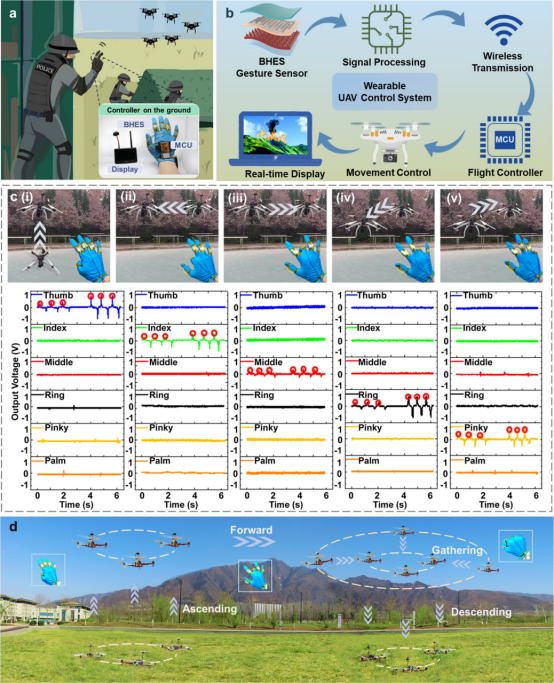
图5 BHES在人机界面应用中的实现
综上所述,该研究采用纳米级皱纹图案PET和微锥图案DN水凝胶,提出了一种基于人体皮肤的超灵敏、多功能水凝胶的电子皮肤。引入纳米级皱纹图案PET以模仿表皮表面并产生接触带电机制。此外,采用微锥图案的DN水凝胶作为摩擦层和导电电极,以提高器件的灵敏度。设计的DN水凝胶具有出色的抗脱水和抗冻能力,出色的透明度(在可见光谱中超过85%)和令人钦佩的电稳定性。精心设计的BHES用作压力传感器,在相对较宽的压力范围(17 Pa ~ 32 Pa)内具有高灵敏度(20.5000 mV/Pa),检测限低,响应速度超快(10 ms)/恢复(17 ms)。多功能BHES赋予机器人材料识别和纹理识别能力。在深度学习的帮助下,10种材料和4种粗糙度的识别准确率分别为95.00%和97.20%。通过将BHES与信号采集/处理电路进一步结合,该传感器展示了其作为人机界面的能力,通过监控人类手势来调节无人机的运动。该研究可用于数字孪生和元宇宙应用中的智能机器人,在交互式人机界面方面具有巨大潜力。
审核编辑:刘清
-
【OK210申请】四轴无人机的多功能控制系统2015-07-24 0
-
无人机侦测和反制系统2017-04-05 0
-
郑州无人机侦测反制系统使用更便捷2020-09-10 0
-
【HarmonyOS HiSpark Wi-Fi IoT HarmonyOS 智能家居套件试用 】鸿蒙系统无人机控制系统2020-09-25 0
-
无人机飞控系统2021-07-21 0
-
无人机控制系统原理是什么?2021-11-08 0
-
反无人机技术的研发,无人机反制设备成为热门产品2022-09-08 0
-
如何使用可穿戴传感器和ESP2866驾驶鹦鹉无人机?2023-05-23 0
-
农药喷洒多旋翼无人机控制系统研究_黄水长2017-01-13 903
-
基于ATmegal28的无人机控制系统硬件设计2017-09-25 822
-
无人机中继模块和无人机图传控制系统介绍2018-05-22 3219
-
仿生无人机能增强无人机的环境适应性 是未来无人机研发的重要方向2019-11-25 1375
-
北京林业大学:研究多功能MXene导电两性离子水凝胶应用于柔性可穿戴传感器阵列2023-05-19 1048
-
基于MXene水凝胶实现可穿戴人机交互,用于智能水下通信和传感救援2023-08-21 1383
-
基于图案化水凝胶材料的多功能仿生电子皮肤2023-09-06 929
全部0条评论

快来发表一下你的评论吧 !
