

自动驾驶系统功能自车运动与路径规划介绍
描述
自车运动
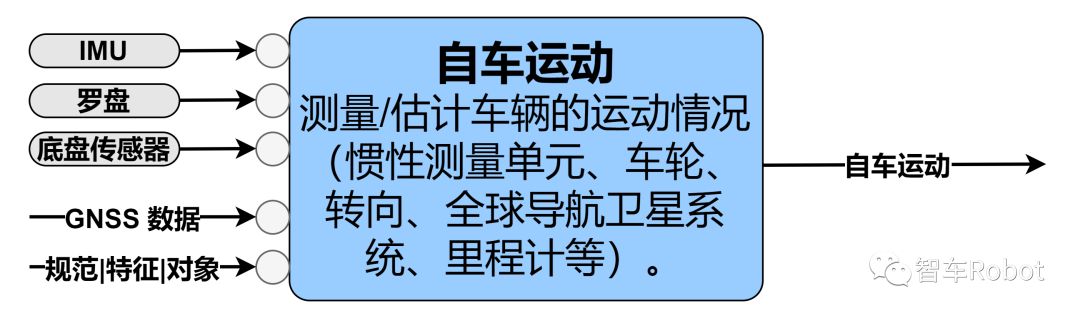
自车运动功能模块图自车运动模块估计车辆随时间姿态(位置+方向)的变化。通过多种不同类型传感器计算和改进的运动估计的融合,可以获得比单一传感器测量更准确可靠的估计。根据系统的不同,使用的输入数量各异。更简单的自车运动组件可能只处理IMU和底盘传感器的数据。然而,更复杂的系统可能使用所有或子集的其他输入来计算额外的运动估计,然后将其融合在一起。
自车运动输入:
•规范|特征|对象:使用连续的感知数据序列来估计自车运动。估计可以基于具有不同计算复杂度的各种算法。例子是光流和基于CNN的估计器,利用像素级数据或已经检测到的特征。也可以利用已分类的对象与已知速度(例如护栏)。
•底盘传感器数据:包含控制/执行器反馈,改进自车运动估计。
•IMU数据:包含加速度计和陀螺仪传感器数据,提供自车运动估计。
•罗盘数据:提供绝对旋转测量,改进自车运动估计。
•GNSS数据:从多个顺序的地理空间位置读数计算自车运动估计。
自车运动输出:
•自车运动:提供自车运动估计使自动驾驶系统中的多个其他组件(例如感知或定位)能够完成其任务。
路径规划
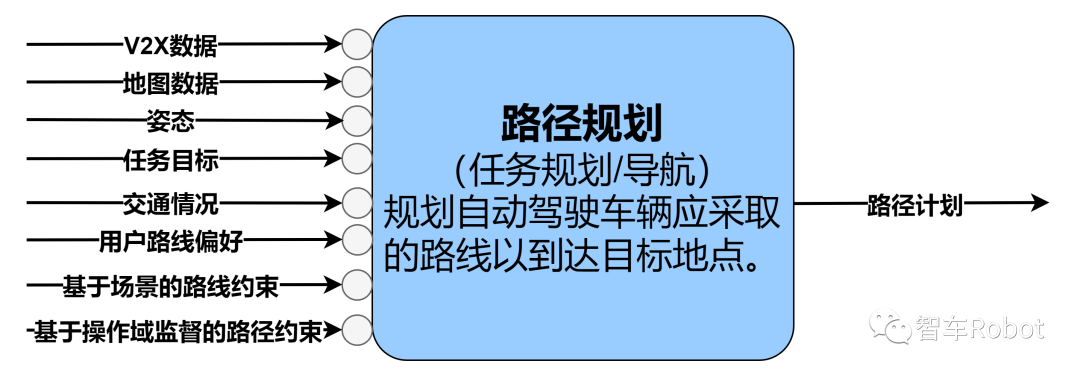
路径规划功能模块图
路径规划功能模块提供算法来确定实时路径以到达目标目的地。它接受驾驶员所需的目的地,并从车辆当前位置计算到达该目的地的最短路径,同时考虑驾驶员偏好和交通条件。也称为任务规划,它负责将“从A到B”的期望任务分解成结构化的道路片段,如所提供的地图(典型示例是提供车道级子任务)所指定和定义的。一组车道级子任务被输出,它们描述了车辆在每个交叉口的所需车道和转向。此外,当车辆完成当前的车道级子任务时,它会自动计算下一组目标并提供下一个车道级子任务。在设有停止标志、交通灯或让行要求的交叉口,该模块参考来自感知系统的输入来决定汽车是否可以进行到下一个提交。
路径规划输入:
•V2X数据:用于接收交通信息或道路警报。
•地图数据:计算路线。
•姿态:提供路线的起点。
•任务目标:指定目标目的地。
•交通状况:提供自主车辆附近或路线计划上的交通状况的动态源信息。
•用户路线偏好:提供约束路线选择的偏好或规则。可能包括乘车服务或自主车辆本身保持在操作设计域内或避免收费道路的约束。
•基于场景的路线约束:提供动态确定的路线约束,如封闭道路标志、高速公路上封闭的车道或用路障封闭的高速公路入口。
•基于操作域监控的路线约束:由于需要保持在操作设计域内而对路线进行约束。一个示例是由于缺乏路灯照明而在某些时间避免某些路线。
路径规划输出:
•路径计划:提供自主车辆将要走的路线描述,包括适用的车道,以达到目标目的地。
-
【mBot申请】自动驾驶车2015-11-30 0
-
自动驾驶真的会来吗?2016-07-21 0
-
细说关于自动驾驶那些事儿2017-05-15 0
-
自动驾驶的到来2017-06-08 0
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 0
-
车联网对自动驾驶的影响2019-03-19 0
-
中国自动驾驶行业前景看好,国产技术迅速发展2019-04-03 0
-
如何让自动驾驶更加安全?2019-05-13 0
-
自动驾驶车的人车交互接口设计方案2020-07-30 0
-
UWB定位可以用在自动驾驶吗2020-11-18 0
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 0
-
自动驾驶技术的实现2021-09-03 0
-
自动驾驶线控底盘VCU功能介绍2021-09-07 0
-
自动驾驶中基于图搜索的常用路径规划算法介绍2021-04-25 3084
-
自动驾驶之路径规划2023-06-01 184
全部0条评论

快来发表一下你的评论吧 !
