

运动控制器的通信功能有哪些呢?
通信网络
描述
与驱动器之间的通信
目前,大多数生产机械都使用了数字总线系统,它们处理管理层、机器控制和执行机构间的通信,用于两种通信类型:过程通信和数据通信。
(1)过程通信
过程通信包括周期性地传送数据与设定值,被传送数据量相对较小,例如一个驱动器只需要4~16字节。连接传感器和执行器的数量一般由系统组态决定,它可以使处理通信的总线周期保持恒定。对于只有过程通信的系统,总线周期通常由控制器所带的轴数决定。
(2)数据通信
数据通信不直接应用于生产过程的执行,而是工程开发中需要。数据与编程装置非周期性地进行数据交换。通信量可以做到很大,可以大于100字节。
总线周期由过程通信与数据通信组成,不带数据通信的总线系统可以缩短通信时间,同时又能保证总线周期的等时同步效果,因此对于伺服系统的控制,采用过程通信模式。Profibus与Profinet是西门子最常用的两种通信方式,最新版本都支持等时同步功能。
针对两种通信模式,Profidrive特性以报文的形式明确了驱动器与控制器之间的数据访问程序。在伺服控制中,西门子驱动器的专有报文105不但含有控制器对驱动器与编码器的命令字,还包括动态伺服控制(DSC)属性的通信字,如下图所示。
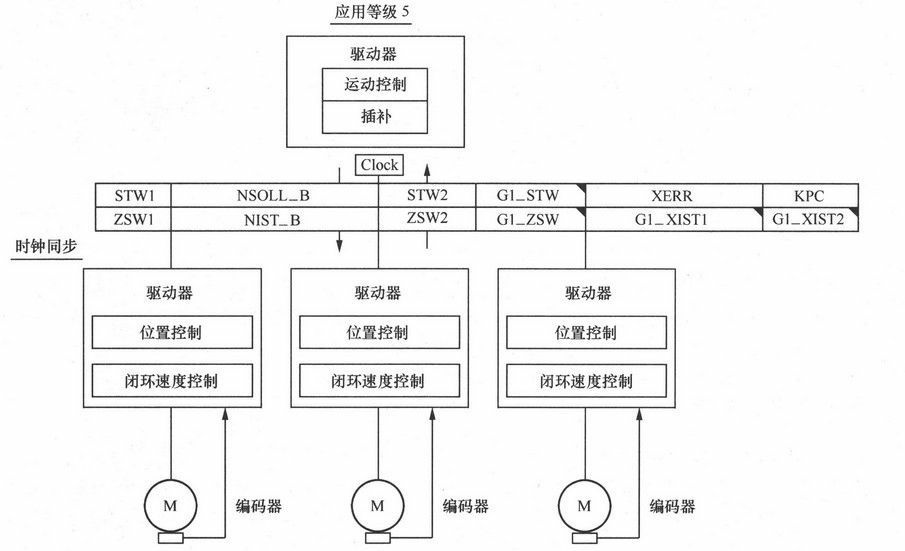
带有DSC的报文105
其中,STW是控制器对驱动器的控制字,NSOLL_B作为速度预控发送给驱动器,G1_STW是编码器的控制字,XERR与KPC分别是位置控制器的偏差与比例增益。DSC带来的好处是将位置控制器从运动控制器中转移到驱动器中,以提供其采样周期,进而提高系统的动态特性。
与控制器之间的通信
在很多大型工业生产线中,一个运动控制器所带的轴数不能满足工艺要求,因此很多情况下会需要两个以上的运动控制器,而且控制器之间所带的轴不是独立的,依然存在同步关系,即人们经常提及的分布式同步的需求,如下图所示。
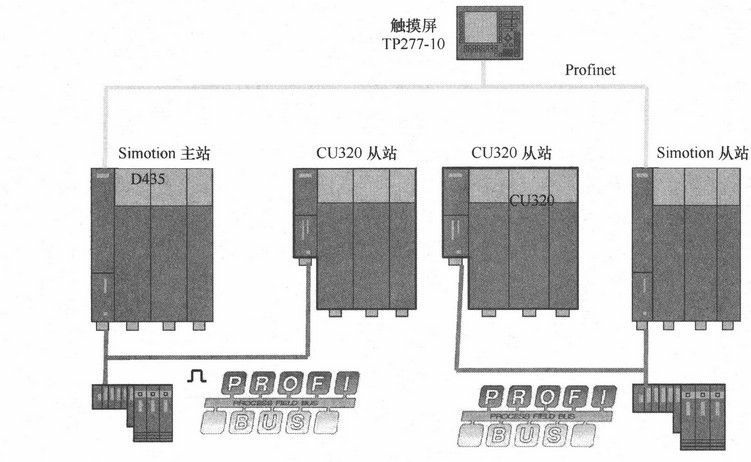
控制器之间的分布式同步
控制器与控制器之间也可以建立Profibus或者Profinet通信方式,通过主从通信的模式,来实现不同控制器所带轴之间的分布式同步。
OPC
OPC客户机应用程序可以通过一个标准的、开放式的、与制造商无关的接口,与OPC服务器进行通信。运动控制器可以将自己的变量通过OPC的形式传递给OPC服务器。这种方式常用于第三方监控设备对Simoiton数据的监控、采集以及修改。
TCP/IP
在很多场合中,运动控制器需要与工控机建立数据交换关系,但交换的都是实时性比较差的数据,因此不用来参与运动控制,只是为了监控或者修改数据。在工控机中可以通过VB、VC等通用编程语言来实现TCP/IP通信。西门子运动控制器Simotion也为用户提供了相关的指令。
审核编辑:刘清
-
ACS运动控制器浅谈#ACS控制器 #ACS #ACS运动控制器 #可编辑控制器 #音圈电机 #硬声创作季电子知识科普 2022-10-22
-
正运动技术企业宣传片# 运动控制器# 运动控制卡# 运动控制系统# 正运动控制器# 正运动控制卡正运动技术 2023-12-13
-
运动控制器是如何进行设计的?2019-07-31 0
-
如何利用ARM+PCL6045B设计嵌入式运动控制器?2019-07-31 0
-
如何利用DSP与FPGA设计运动控制器?2019-08-06 0
-
kp3-05m06r型运动控制器能实现什么功能?2019-08-16 0
-
运动控制器如何选择2019-09-12 0
-
运动控制器的类型有哪些2019-12-10 0
-
新型可通信智能断路器控制器基本功能有什么?2020-03-10 0
-
东莞运动控制器的工作原理及应用2021-08-02 0
-
PCL6143运动控制器原理及应用2023-09-26 0
-
基于SOPC的运动控制器设计2009-09-01 394
-
什么是运动控制器_运动控制器的工作原理及应用2018-04-23 36148
-
运动控制器位置锁存功能的应用2022-11-07 977
-
智能车控制器功能有哪些2023-11-26 885
全部0条评论

快来发表一下你的评论吧 !
