

基于机器学习的触觉传感器设计
MEMS/传感技术
描述
类皮肤柔性传感器在医疗保健和人机交互中发挥着至关重要的作用。然而,一般目标集中在追求类皮肤传感器本身固有的静态和动态性能,同时伴随着各种试错尝试。这种前瞻性策略使传感器的设计几乎脱离了实际应用。
据麦姆斯咨询报道,近日,浙江大学杨赓、徐凯臣研究团队开发了一种机器学习(ML)指导的柔性触觉传感器系统设计,该系统能够在六种动态触摸模式下实现高分类精度(≈99.58%)的触觉感知。与直觉驱动的传感器设计不同,这种机器学习指导的性能优化是通过引入基于支持向量机(SVM)的机器学习算法以及用于制造参数选择的特定统计标准来挖掘深藏在原始传感数据中的特征而实现的。这种逆向设计将统计学习标准融入到传感硬件的设计阶段,弥补了器件结构和算法之间的差距。相关研究成果以“Machine Learning-Enabled Tactile Sensor Design for Dynamic Touch Decoding”为题发表在Advanced Science期刊上。
在所提出的机器学习辅助传感器设计中,选择了一组与接触滑动模式下基于摩擦电纳米发电机(TENG)的触觉传感性能相关的参数作为初始优化目标,包括读出信号的类型(如电流和电压)、电极的分布、形状和微结构的密度。通过手指皮肤在传感器上执行六种动态触摸模式,包括按压、拍打、向上、向下、向左和向右滑动。这些多向相互作用被选择用于目标任务,以评估每个制造参数。与一般直觉驱动的传感器设计不同,这项工作提供了一种数据驱动的方法来优化目标应用的制造参数,这将器件设计和算法紧密联系起来。
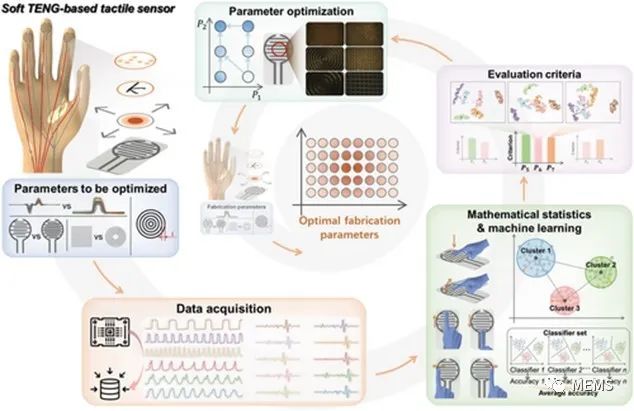
基于制造参数优化的机器学习辅助传感器设计示意图
这种基于TENG的触觉传感器由四层组成,包括顶部和底部聚二甲基硅氧烷(PDMS)封装、叉指型激光诱导石墨烯(LIG)电极和聚全氟乙丙烯(FEP)膜。当手指接触PDMS表面时,由于不同的电子亲和力,人类皮肤带正电。基于静电感应原理,带电手指的水平滑动会在两个LIG电极之间产生感应电流的电子转移。在这种情况下,LIG电极的叉指型设计允许梯度电子转移,即感应电流正负交替,以平衡两个电极之间的电势差。这种机制有效地将与动态触摸模态相关的信息整合到原始数据中。
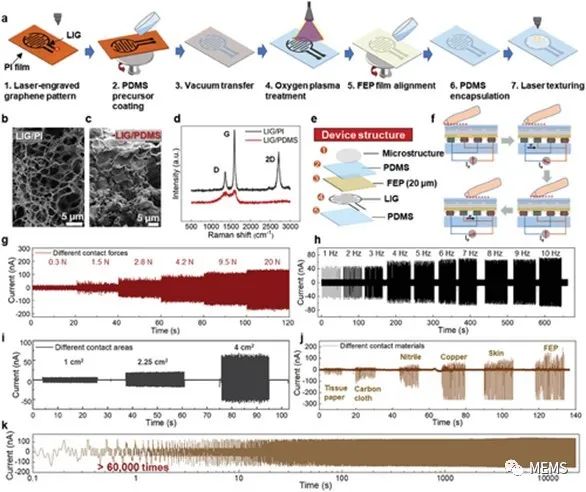
基于TENG的触觉传感器特性
为了提高基于TENG的触觉传感器的性能,研究人员开发了一套评估标准,并应用于选择所需的输出信号类型和优化制造参数。评估后,选择基于电压的信号作为传感器输出。同时,稀疏分布的电极对和间隔较小的指纹状微结构有助于提高传感器的性能。研究人员展示了在六种触摸模式下具有优化参数的传感器的输出,通过调谐的线性SVM分类器实现了99.58%的高分类准确率。
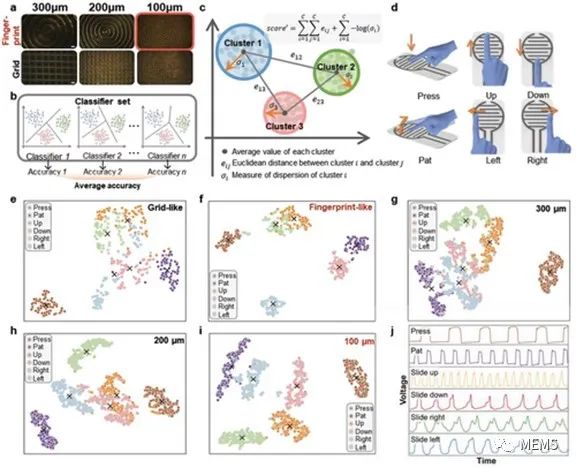
基于机器学习方法的制造参数优化
为了模仿人类皮肤卓越的触觉行为,所提出的触觉传感器被集成到机器人手指上进行盲文识别。通过添加机器学习算法,机器人-传感器系统在传感、提取、计算和解码信息的闭环中工作。由于卷积神经网络(CNN)强大的非线性拟合能力,平均分类准确率达到96.12%。根据实验结果可以看出,大多数盲文数字的分类准确率都超过95%(例如数字1、2、4、5、6、7、9),而在数字0、3、8的分类准确率较低。这种微小的性能差异可能是由于在数据采集过程中机械手的力控制精度和重复精度造成的。
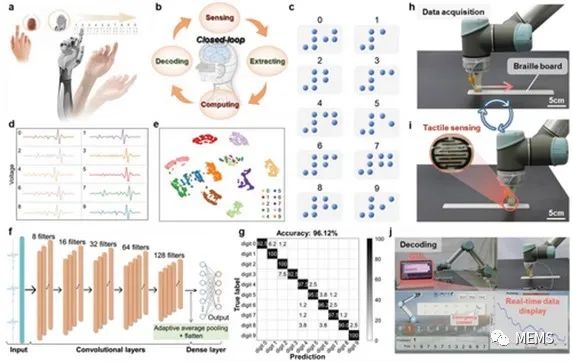
通过在机器人手指上集成触觉传感器实现多点接触的动态解码反馈
总而言之,研究人员开发了一种基于TENG的柔性触觉传感器,该传感器可以在输出信号选择和制造参数优化方面实现机器学习辅助的器件设计。在设定评价标准后,通过对六种接触模式的统计分析,对输出信号的参数值、电极的分布密度以及不同的表面微观结构进行比较和选择。基于制造参数和机器学习协同设计触觉性能的综合评价,获得了≈99.58%的分类准确率,高于参数优化前的分类准确率(≈95.579%)。鉴于最佳的触觉传感性能,该触觉传感器被成功地应用于各种英文字母和句子的手写识别。
此外,通过应用定制的CNN模型提取特征并评估决策边界,10个盲文数字的分类准确率达到96.12%。为了模仿人类的感知反馈,一只配置触觉传感器的智能机械手完成了11位盲文电话号码的动态识别任务。这项工作为基于逆向设计策略有目的地构建传感器提供了指导,对直觉驱动的传感器设计提出了挑战。
审核编辑:刘清
-
[分享][下载]美国PPS触觉传感器有限公司2009-12-16 0
-
[原创]美国PPS触觉传感器有限公司2009-12-16 0
-
美国PPS触觉传感器有限公司2009-12-16 0
-
智能机器人对于传感器的需求2015-01-20 0
-
机器人传感器2018-01-03 0
-
传感器应用在触觉前沿图像系统设计2018-11-01 0
-
机器人传感器的类别和应用原理2018-11-08 0
-
触觉传感器为机器人提供了新功能2018-11-08 0
-
机器人传感器应用2021-09-16 0
-
基于传感器的触觉设计应用2017-09-14 796
-
多维力觉传感器赋予机器人真正的触觉2018-08-28 4855
-
六维力传感器赋予机器人真正的触觉体验2020-12-26 450
-
用于小型腿式机器人的仿生裂纹触觉传感器介绍2023-05-05 516
-
什么是触觉传感器?触觉传感器如何工作?2023-08-29 1364
-
工业机器人的触觉传感器有哪些?传感器作用是什么?2024-03-11 235
全部0条评论

快来发表一下你的评论吧 !
