

电动机定子绕组首尾的判定
描述
一、相别判定
1、先将定子绕组的六个线头分开,用万用表或兆欧表分别测量,通路(电阻很小)的两个线头为同相绕组。
2、找出三对同相绕组的线头,分别用黄、绿、红做好标记。
二、首尾判定
定子绕组的首尾判定有以下三种方法:
1、万用表法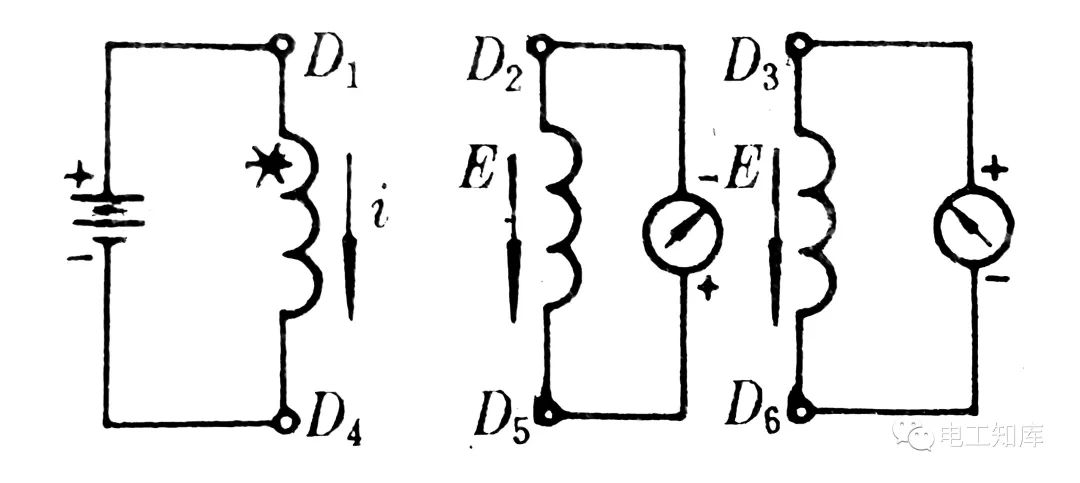 1)把万用表调到直流mV档或直流mA档,把任意一相的两个线头接到表上,指定接红表笔(+)的线头是首端,接黑表笔( - )的线头是尾端。
1)把万用表调到直流mV档或直流mA档,把任意一相的两个线头接到表上,指定接红表笔(+)的线头是首端,接黑表笔( - )的线头是尾端。
2)把另一相的一个线头接电池负极,另一个线头碰电池正极。如果指针向(+)偏转,则与电池正极相接的线头是尾端,与电池负极相接的线头是首端。如果指针向( - )偏转,则与电池正极相接的线头是首端,与电池负极相接的线头是尾端。
3)用同样的方法测出第三相绕组的首端和尾端,做好标记。
2、环流法
根据电磁感应原理,利用转子中的剩磁在定子三相绕组中产生感应电动势来判定绕组的首尾端。
1)把万用表调到直流mA档,红、黑表笔分别接在两相绕组的任意两个引出线头之间,另外四个线头随便串联,将三相绕组接成三角形。
2)用手缓慢而均匀地转动转子,观察万用表指针摆动情况,摆动不大或不摆动,说明三角形首尾接线正确,三相绕组为首尾相连,如果指针偏转角度较大,则倒换线头,直到三角形首尾接线正确为止。
3)指定三相绕组的首尾,做好标记。
3、灯泡法
根据电磁感应原理,一相绕组加上电压,另外两相就会产生感应电动势,若将两相绕组串联起来,如果电动势相加,则是首尾相连;如果电动势相减为零,则是头头或尾尾相连。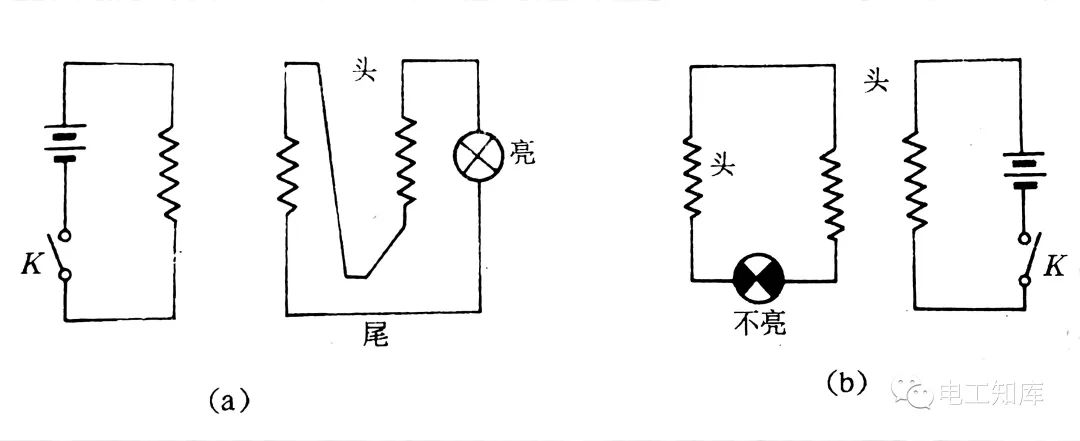 1)把任意一相绕组接入电池,另外两相绕组串联起来接入灯泡,合上开关K,如果灯泡很亮,则串联两相绕组为首尾相连,如果灯泡不亮,则串联两相绕组为头头或尾尾相连。
1)把任意一相绕组接入电池,另外两相绕组串联起来接入灯泡,合上开关K,如果灯泡很亮,则串联两相绕组为首尾相连,如果灯泡不亮,则串联两相绕组为头头或尾尾相连。
2)指定接灯泡串联的两相绕组首尾,做好标记。
3)把接电池的一相绕组与已找出首尾的一相绕组串联起来接入灯泡,另一相已找出首尾的绕组接入电池,判定方法同上。
-
永磁无刷电动机简介2008-11-25 0
-
电动机常见故障及原因2009-09-12 0
-
异步电动机出现定子绕组故障和匝间短路故障时,它们的定子电流波形是什么样的?2016-09-28 0
-
电动机在工作中的常见问题2018-10-23 0
-
电动机定子绕组Δ形启动2021-09-02 0
-
电动机电气常见故障产生的原因及处理方法2023-12-14 0
-
高压电动机定子绕组匝间绝缘方法2009-07-03 765
-
用“环流法”辨别电动机首尾2010-10-16 1451
-
三相异步电动机定子绕组的判别方法2020-08-14 5368
-
如何用万用表判别电动机绕组的首尾端2021-04-04 10274
-
电动机定子的结构原理2021-07-16 8566
-
电动机定子绕组的故障与处理方法2023-08-21 568
-
电动机定子绕组首尾的判定方法2023-08-21 962
-
电动机定子绕组的常见故障2023-10-07 728
全部0条评论

快来发表一下你的评论吧 !
