

具有弯曲宏观裂纹的多功能水凝胶传感器
MEMS/传感技术
描述
背景介绍
软机器是生命和机器的桥梁。由于它们的柔软和轻盈,它们本质上是安全的,对人类友好。与刚性机器相比,能够与环境交互的智能软机器更有希望融入人类社会。然而,大多数现有的软机器都是以一种智能有限的方式运行的。例如,一种广泛使用的软机器,即软夹具,通过被动适应物体和夹具之间的变形来抓取目标。当目标比夹持器更软、更脆弱时,软夹持器的功能失效。赋予软机器智能需要对环境及其自身状态的感官感知,以实现闭环控制。具有简单结构但具有多种功能的可拉伸传感器是非常理想的,例如那些能够检测软夹具的变形和触觉力的传感器。
依赖导电聚合物对变形的电阻响应的应变和触觉传感器无处不在,实例包括掺杂有炭黑的聚二甲基硅氧烷、涂覆有碳纳米管的橡胶纤维和涂覆有金属纳米线的聚氨酯纤维。由大块导电材料制成的电阻传感器的灵敏度本质上受欧姆定律的支配。在小变形情况下,规范系数(GF)被限制为一个单位。为了提高电阻应变传感器的应变系数,在导电材料中引入了微/纳米级单向裂纹。打开和闭合裂缝会断开并重新连接电流路径,导致电阻急剧变化。然而,这种强化机制仅适用于特定的应变范围(小于5%),取决于详细的微观结构。高灵敏度和大的检测范围仍然是可拉伸传感器的折衷方案。
本文亮点
1. 本工作提出了一种由高度开裂的水凝胶(HCHG)实现的设计,该水凝胶对大范围的拉伸应变、弯曲和触觉力非常敏感。
2. 当预切割的弯曲裂纹被外部载荷闭合/打开时,该机制依赖于流动离子电流的横截面积的连续急剧变化。水凝胶的高断裂韧性抑制了裂纹的扩展,使传感变得稳健。
3. 通过设计裂纹模式,0–20%拉伸应变的灵敏度为80,触觉力的灵敏度为0.45 kPa⁻¹。与大块水凝胶制成的传感器相比,灵敏度分别提高了两个和三个数量级,同时保持了可检测的应变范围(高达215%)。
4. 展示了HCHG传感器在操纵机械臂和用软夹具无损抓取更软物体方面的应用。
图文解析
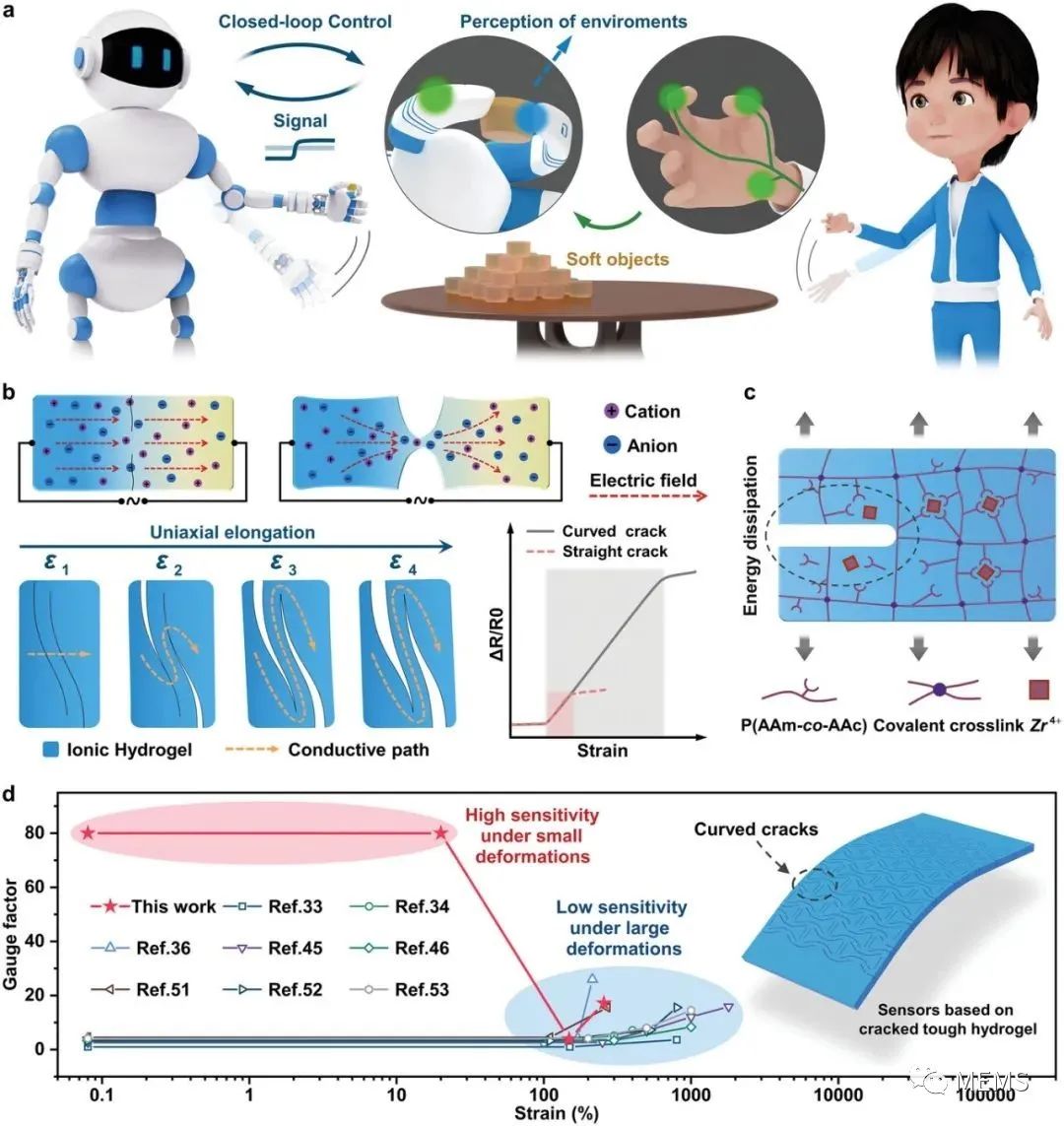
图1 用于软机器的使用HCHG的多功能传感器。a) 具有高灵敏度的应变和触觉传感器是软机器所需要的,尤其是用于操纵甚至更软的物体。b) 所提出的使用破裂离子水凝胶的电阻传感器对小变形具有高灵敏度的原理。当水凝胶被拉长时,裂纹在小变形时逐渐张开,并切断了离子电流的局部路径,导致电阻急剧上升。此外,弯曲裂纹逐渐张开,导致在宽应变范围内具有高灵敏度。c) 所提出的传感原理依赖于在大变形时没有任何扩展的裂纹开口。因此,使用具有高韧性的水凝胶。d) 我们设计的裂纹模式传感器与使用大块材料的现有电阻应变传感器之间的应变系数比较。
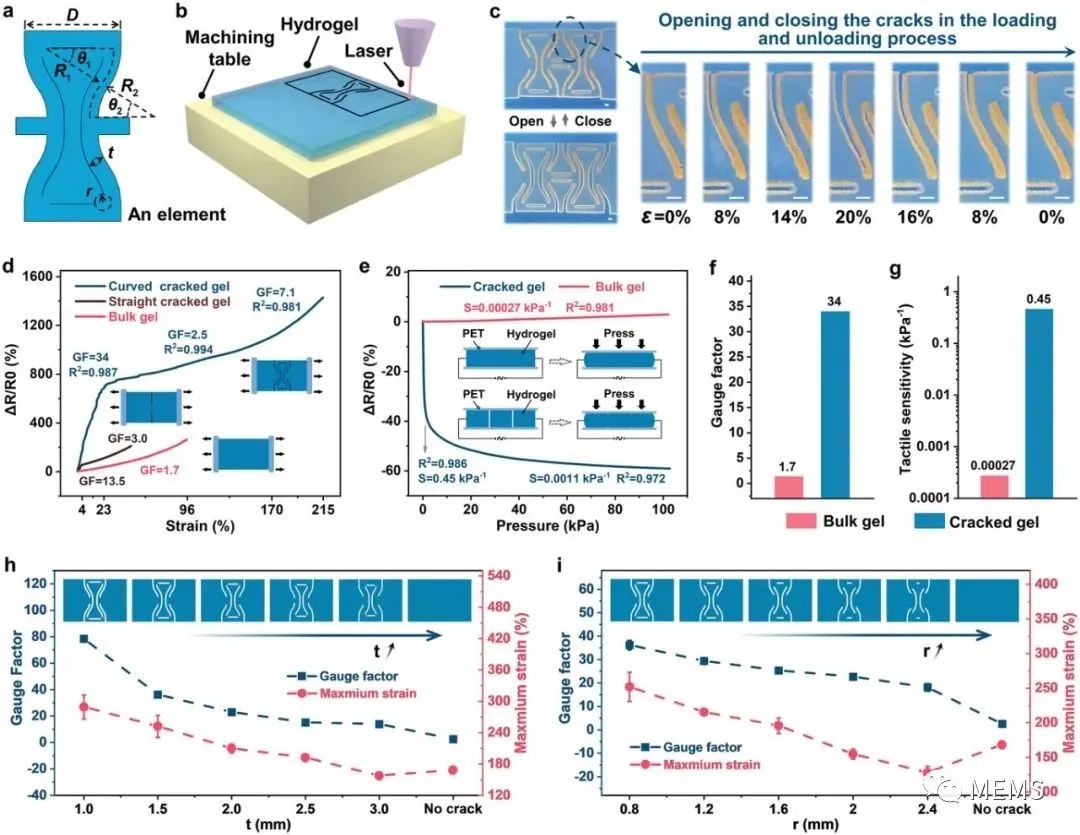
图2 设计大块水凝胶中的裂纹图案,以实现高灵敏度和大的可测量应变范围。a) 裂纹图案的晶胞的配置。以下所有分析都是在一个晶胞上进行的。b) 大块水凝胶中裂纹图案的制备示意图。c) HCHG中弯曲裂纹在单轴拉伸下的张开过程。比例尺为1毫米。d) HCHG、本体水凝胶和在伸长率下具有简单直裂纹的水凝胶的相对电阻变化的比较。在应变超过20%之前,HCHG的变形会出现电阻的线性急剧增加。e) 接触压力下HCHG和本体水凝胶相对电阻变化的比较。f、 g)对于小的拉伸应变和接触压力,HCHG和本体水凝胶的应变系数。h、 i)晶胞的几何参数t和r对最大变形和规范因子的影响。
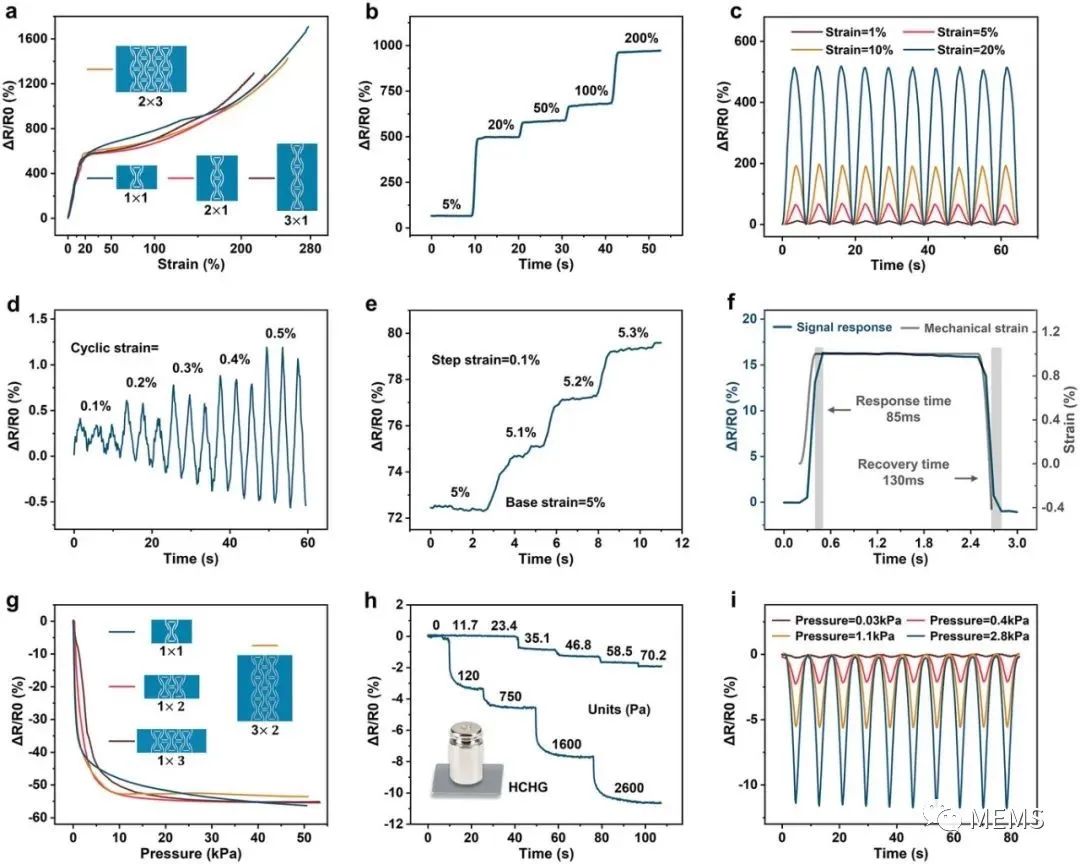
图3 含有不同数量元素的HCHG在伸长和接触压力下的性能。a) 不同元件布局的相对电阻在单轴伸长率下,尤其是在小应变下,几乎表现出相同的响应。b) 含有1×3元素的HCHG的电阻在阶跃伸长的区间内保持稳定。c) 电阻响应在循环拉伸下是可重复的。d)在小伸长率下HCHG的检测极限和e)分辨率。f) HCHG用作应变传感器时的响应和恢复时间。响应和恢复时间是通过从传感器的电响应时间中减去加载/卸载过程的时间延迟而得出的。g) 接触压力下的相对电阻响应几乎与单个布局无关。h) HCHG作为压力传感器工作时的检测极限和分辨率。测量了11.7 Pa阶跃压力下的电阻响应,以显示HCHG作为压力传感器的分辨率。当接触压力保持恒定时,也含有单一元素的HCHG的电阻保持稳定。i) 接触压力循环加载下HCHG的电阻响应。
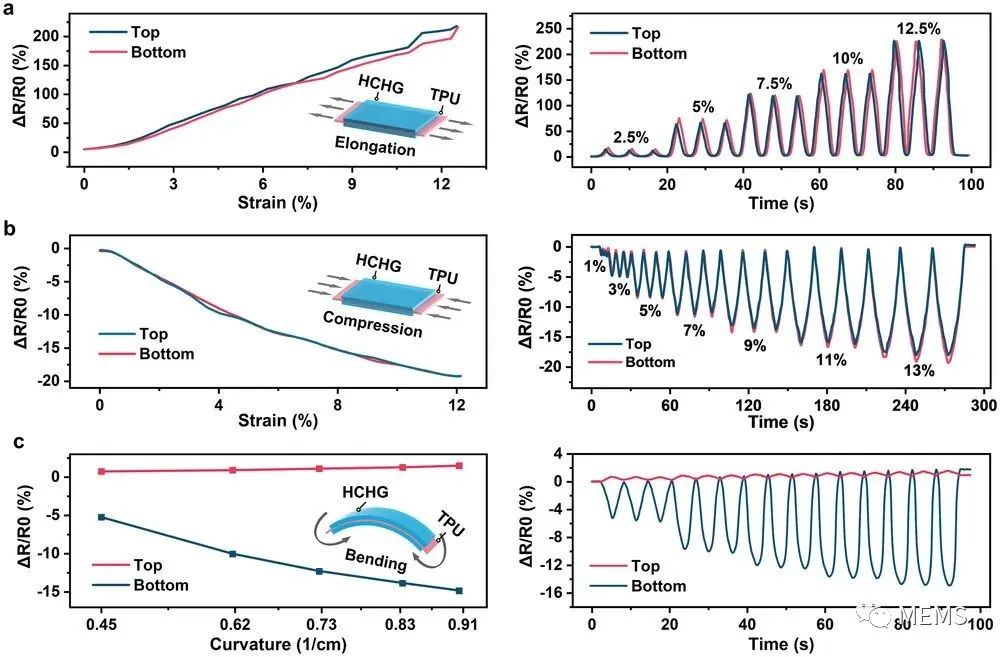
图4 由两个HCHG和一个TPU薄膜组成的夹层结构实现多重传感。夹在可拉伸TPU膜之间的两种HCHG对a)伸长率敏感,其中两种HCHG都增加了它们的电阻,b)压缩,其中两个HCHG都降低了它们的阻力,以及c)弯曲,其中一种HCHG增加了它的电阻,而另一种则降低了。
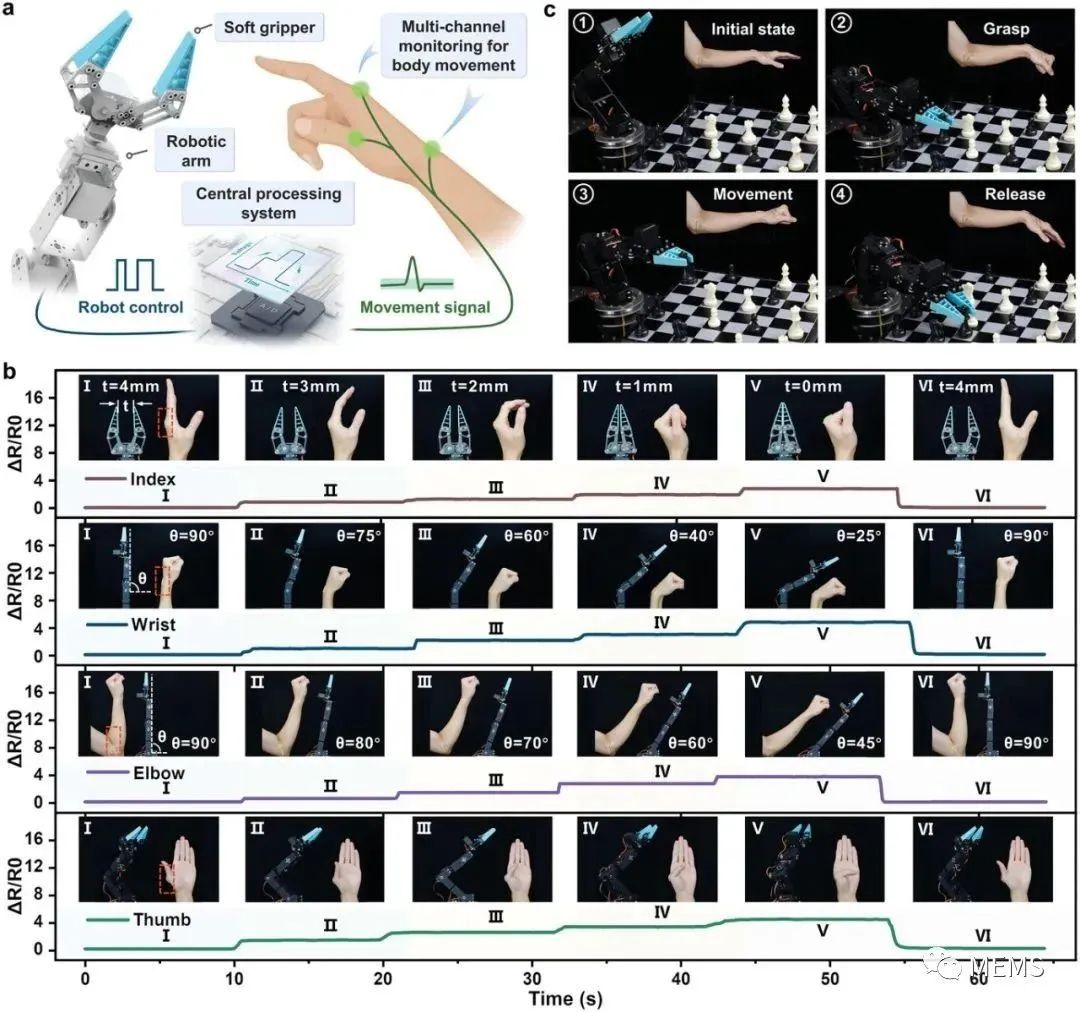
图5 基于HCHG的人体运动检测控制机器人手臂。a) 通过身体运动操纵机械臂的控制图。机器人手臂和人类上肢跛行的关节被绘制出来。对各种跛行运动的检测为机器人关节提供致动信号。b) 附着在食指、手腕、肘部和拇指(用红色虚线框标记)上的传感器对各种姿势的相对阻力响应。机械臂和人体肢体的运动是相互关联的。c) 用分布式传感器通过人体上肢跛行控制机械臂下棋:①初始状态,②抓握,③移动,④释放。
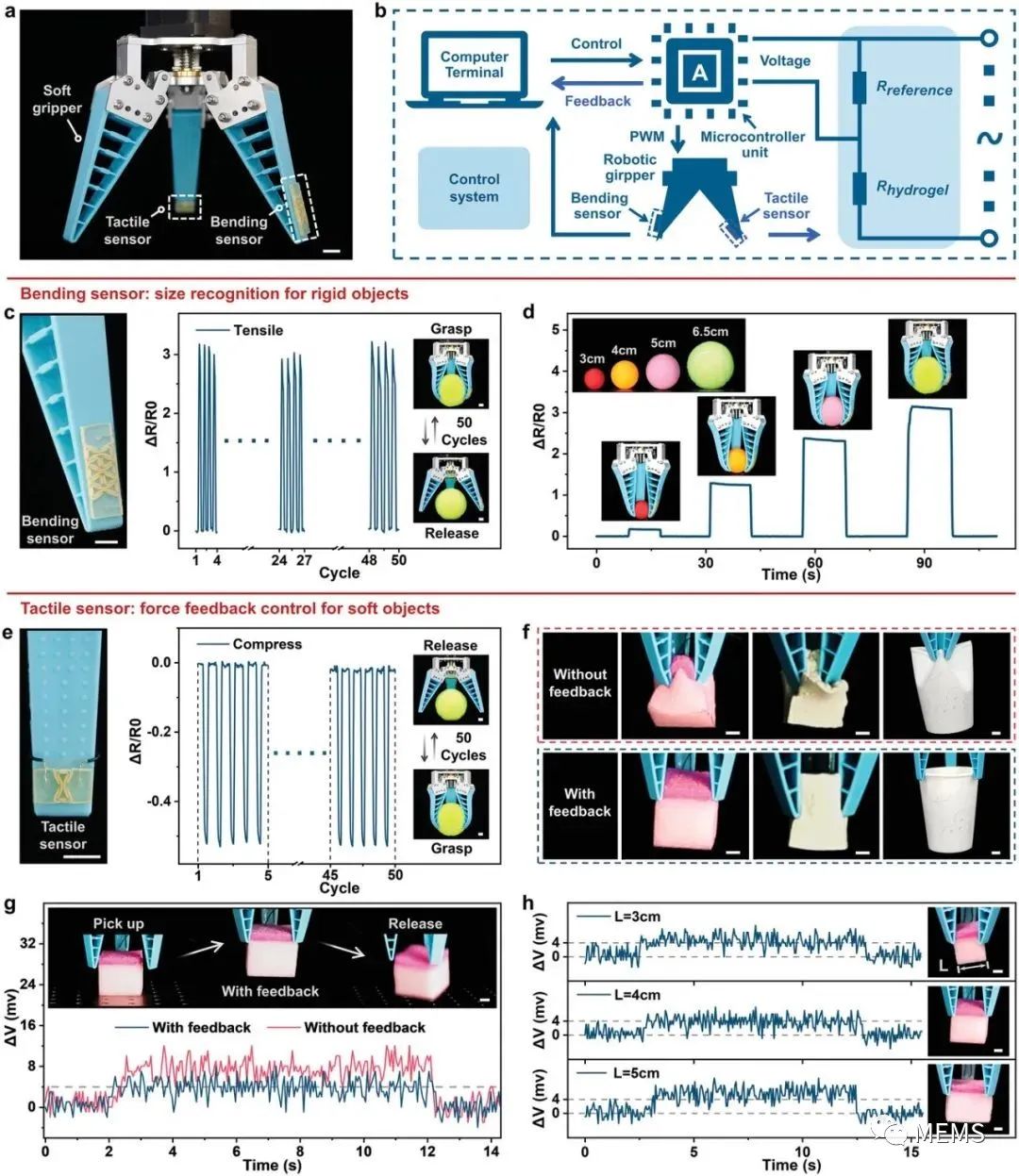
图6 HCHG在物体操纵中的软夹持器应用的多传感能力。比例尺为1厘米。a) 一个软夹具配备了两个HCHG,一个作为弯曲传感器,另一个作为触觉传感器。b) 用于在开放和闭环模式下操作对象的软夹持器的控制图。c) 粘附在软夹具外表面的破裂水凝胶起到弯曲传感器的作用。当夹具周期性地抓取和释放网球时,弯曲传感器的响应是可重复的。d) 当夹持器抓取具有不同半径的硬球时,弯曲传感器的相对阻力变化会发生变化。e) 附着在抓握手指内表面的HCHG起到触觉传感器的作用。当夹持器循环抓取和释放网球时,其响应也是可重复的。f) 夹持器抓取海绵、豆腐和Dixie杯的照片,有反馈控制和无反馈控制。g) 用反馈控制抓取海绵的详细过程。h) 当用反馈控制抓取不同尺寸的海绵时,触觉传感器的相对电阻响应几乎相同。
审核编辑:刘清
-
多功能传感器2013-07-28 0
-
漏水水浸传感器的分类2015-01-12 0
-
弯曲传感器模块的程序2015-12-27 0
-
智能家居——多功能饮水机的设计与实现2016-05-22 0
-
水溶氧,PH传感器2017-08-25 0
-
高分辨率柔性传感器可弯曲光纤传感器自动识别方向2019-05-10 0
-
多功能医疗床中的霍尔传感器应用-响拇指2021-11-04 0
-
溶胶2凝胶硫离子传感器的研制及应用2010-01-16 355
-
基于振弦式传感器的多功能智能检测仪_白泰礼2017-01-12 786
-
柔性弯曲传感器技术在玩具领域有什么作用和应用2018-11-20 1245
-
dfrobotflex 2.2‘’单向弯曲传感器简介2019-12-04 2705
-
弯曲裂纹的机理讲解2023-02-17 554
-
具有超拉伸性、自粘附性及自愈合与高灵敏的导电水凝胶传感器2023-04-11 941
-
氮掺杂石墨烯复合气凝胶,用于灵敏的压力传感器2023-08-10 490
-
研发PAM@SiO2-NH2/石墨烯导电水凝胶传感器2023-08-21 1024
全部0条评论

快来发表一下你的评论吧 !
