

如何实现一种时间切换的单谐振FM MEMS加速度计设计?
电子说
描述
摘要:
本文提出了第一个工作在时间切换差分模式下的调频加速度计,其读出电路基于单个谐振器振荡频率的双重采样,在两种不同的时间内连续偏置。即使存在非均匀过程,该技术理论上能够使与频率温度系数(TCf)相关的偏置漂移分量归零。
此外,通过补偿热应力分量调整TCf失调漂移分量,从而实现高密度,超低漂移的加速度计。各种样品的实验证明,在消费级100μg/ VHz噪声密度下,实现了可重复的低于50μg/ K漂移(没有采样校正)。
简介
新兴的下一代消费级应用(如行人导航和混合现实)迫切需要低成本,高精度的MEMS惯性传感器。对于MEMS加速度计,关于环境变化的零g偏移的稳定性是一个关键问题。16-g的满量程范围(FSR)电容式MEMS加速度计的偏移热稳定性达到1 mg / K左右,超出了创新应用的目标。只有以较低的FSR为代价才能提高MEMS的热稳定性。
经研究,频率调制(FM)加速度计已作为电容解决方案的替代方案,主要用于其高动态范围和准数字频率输出。本文提出了一种新颖的FM MEMS加速度计,通过新引入的时间切换工作原理,能够在保证利用现有技术的实现优越的偏置热漂移性能的同时,保持面积,预期功耗和分辨率完全符合消费者的要求。
设备介绍
谐振加速度计通常由一对MEMS谐振器构成,如果a轴的外部加速度作用在惯性质量上,其频率会有差异地变化。从谐振器频率差中恢复有关输入加速度的信息:

其中2⋅Δf(a_ext)是差分输出频率变化,与通过比例因子S的加速度有关,而f0,1和f0,2是两个MEMS谐振器静止时的谐振频率(即外部a轴加速度为0),在参考温度T0。根据定义,谐振加速度计的ZGO是两个f0之间的差值,除以S,其热性能取决于每个谐振元件的热漂移。
实际上,众所周知,在温度变化下,多晶硅MEMS谐振器会随着杨氏模量温度系数(TCE≈-60ppm / K)线性地改变其谐振频率:

谐振加速度计的ZGO热漂移可写如下:

因此,偏移热漂移由不同振荡元件之间的f0_i和TCE_i不匹配确定。这种结果显然是因为比例因子的增加,但是,通常制造的具有小临界尺寸的谐振器具有高灵敏度,因为存在工艺容差,所以使它们不易实现精确频率匹配。
因此,即使可以通过谐振器的物理近似来最小化TCE失配,静止频率失配仍然是导致偏移漂移的主要原因。
新方法的描述
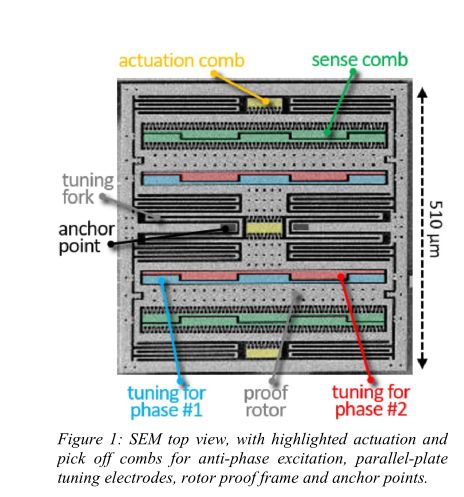
这项工作在概念上通过使用在单个谐振器上及时操作的差分读出而不是在两个单独的谐振器上的空间中克服了漂移问题。即使存在过程非理想性,该原则也能使得与方程式(3)相关的TCf相关贡献无效。所提出的平面内加速度计如图1所示。悬挂结构由带有中心锚的外部刚性框架包围,以优化对依赖于工艺的热应力的抑制,从而产生(510μm)2的总有效面积。传感器分为两个对称半部,由两个4折音叉弹簧连接。每个半部分都有一个由四个4弹簧悬挂的校样转子,两组梳子和两组调音板端口。
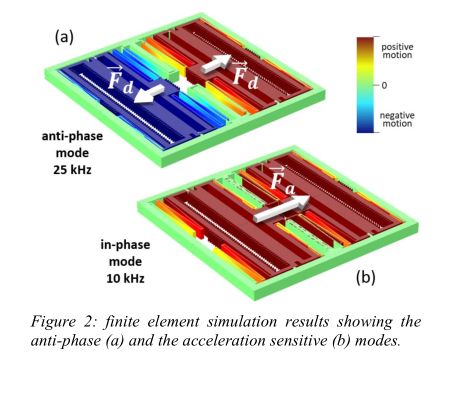
在操作中,传感器通过基于梳状的推拉致动和差分传感器保持在f0 =25kHz的反相共振振荡(有限元模态形状在图2a中示出)。加速度引起同相运动(2b),并通过共模位移朝向调谐端口#1或#2移动转子。
这些平行板端口以互补模式操作。在第一间隔ΔT1(称为阶段#1)期间,电极#1被偏置在DC电压V_tun,而电极#2与转子保持等电位:只有前者在静电软化方面给出了贡献。
假设外部加速度以这样的方式引导以向检测质量向电极#1施加同相运动,反相频率结果相对于静止值f0减小如下:

其中m是与反相运动相关的质量,kmech是对整体反相刚度的机械贡献,kel,0是整体刚度的静电部分的剩余值,而kel(aext)是其转移到期 对外部刺激。
在紧接着的时间间隔ΔT2(称为阶段#2)中,切换施加在调谐端口上的电压。 在这种情况下,假设外部加速度不变,转子质量移离有源调谐端口#2,因此谐振频率结果增加(相对于静止值)并等于:

减去在阶段#1和阶段#2期间获得的两个频率样本产生差分读出。
应当注意,在所提出的加速度计中,仅通过用两个反相方波驱动调谐端口就可以容易地管理调谐相位临时。因此,可以使用一次谐波近似和一阶线性化来描述所获得的输出:

根据采样定理,开关频率f_sw应至少设置为所需信号带宽的两倍(例如,f_sw = 100Hz,应对50Hz带宽)。注意输出信号的FM调制如何忽略反相频率f0的缓慢温度漂移。
系统总览
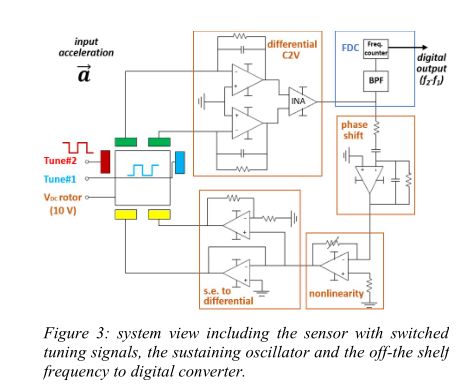
反相模式通过分立的电子极板保持振荡,如图3所示。由质量块振荡产生的运动电流通过差分电荷放大器级转换为电压输出,然后转换为仪表放大器(INA)的单端信号。满足环路相位的巴克豪森准则后,将INA输出送到模拟90°移位器,而高增益级确保快速启动并在达到状态条件时提供非线性。 最后,通过一对反相/非反相缓冲器实现推挽驱动。
进行频率读出后,将INA输出发送到现成的Keysight频率计,该频率计先前是带通的,为了减小仪器输入端的宽带噪声,从而避免与此特定测量方法相关的噪声折叠。
设备特性
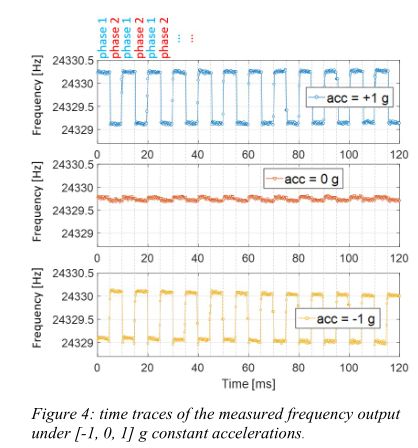
第一次通过倾斜板来验证设备工作原理,可以更改施加到加速度计的重力加速度的符号。图4报告了在[+ 1,0,-1] g的恒定加速度下,对于24个连续,5毫秒切换阶段(f_sw =100Hz)的测量频率的时间轨迹。可以观察到,对于相同的输入加速度,相对于静止值的频移在两个时间相位中的符号相反:两个移位之间的差异与加速度成比例。在没有加速度的情况下可以看到约50mg的残余偏移。
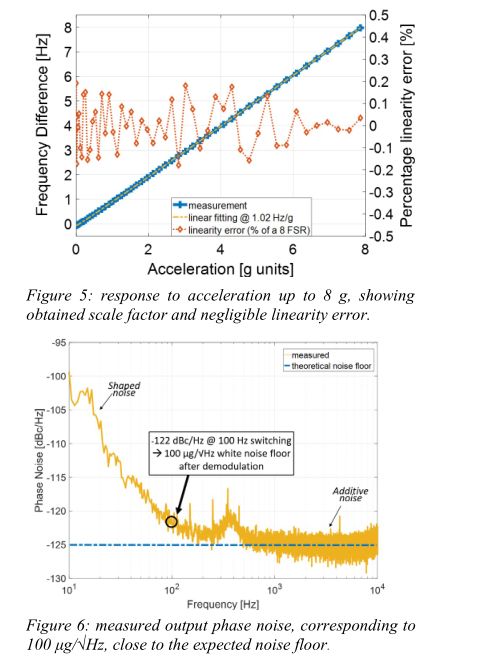
通过将电子板安装在速率表上来施加更大的激励,其中MEMS传感器从旋转中心移位,以便利用离心加速度。在这种情况下,检验质量受到从0g到8g的加速。图5报告了获得的1.02 Hz / g的比例因子,同时证明了0.2%以下的线性误差。最后,电子振荡器的相位噪声表征(图6)显示100 Hz切换调谐波的相位噪声水平为-122 dBc / Hz,对应于100μg/√Hz的消费者应用规范的等效输入加速度噪声密度
ZGO热漂移
在气候室内安装与垂直于重力方向的装置耦合的电子板进行偏移热漂移测量。将腔室预热至95°并关闭以避免测量仪器的振动。通过靠近MEMS定位的温度传感器监测冷却。每摄氏度变化捕获零g偏移值。
由于MEMS器件直接引线键合在PCB板上以最小化寄生效应,为了检查热稳定性能的可重复性,在三个不同板上的三个不同传感器组装并使用所述程序进行测试。
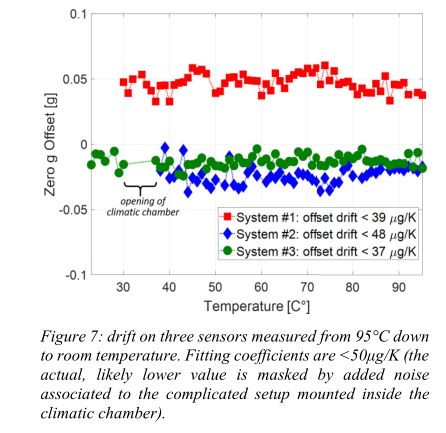
图7报告了这三个系统的测量偏移漂移,并显示了所有样品如何达到低于50μg/ K的热系数,在直接数据(频率)采集后没有任何后处理补偿。
结论
该工作展示了第一款单谐振器,时间切换,超低漂移FM MEMS加速度计。该传感器被设想为在面积和噪声密度方面应对消费者约束。对于预期的功耗,可以注意到方程(6)的输出频率调制在概念上与Lissajous FM陀螺仪(功耗406 ua)的相同。通过在单个谐振器上实现差分读出,由于时间切换操作,可以擦除或精细调整与TCf相关的偏移漂移以抵消其他热漂移源。通过这种方式,传感器实现了可重复的亚50μg/ KZGO漂移,这是实现导航级消费类MEMS加速度计的重要一步。
-
USB微机电加速度计2017-07-10 0
-
从一份案例研究MEMS加速度计的振动校正2018-10-22 0
-
MEMS加速度计性能已臻成熟2018-10-23 0
-
MEMS加速度计性能成熟2018-10-29 0
-
数据说话,今非昔比的MEMS加速度计你真的了解吗?2018-11-01 0
-
详解状态监控的MEMS加速度计2019-07-17 0
-
MEMS加速度计如何选择2019-07-25 0
-
MEMS加速度计怎么选择?2019-08-13 0
-
谐振式微加速度计有什么特点?2019-09-03 0
-
2476-100加速度计2021-05-27 0
-
2422H-400加速度计2021-05-28 0
-
2227-050加速度计模块2021-05-28 0
-
1527J-010加速度计2021-05-28 0
-
1521L-200加速度计2021-05-28 0
-
设计具有成本效益的加速度计2022-08-23 0
全部0条评论

快来发表一下你的评论吧 !
