

2023年电子设计大赛E题分享(基于CW32)
电子说
描述
一、团队介绍
团队成员:姚凯 王玉钱 陈叶璐健
二、题目要求
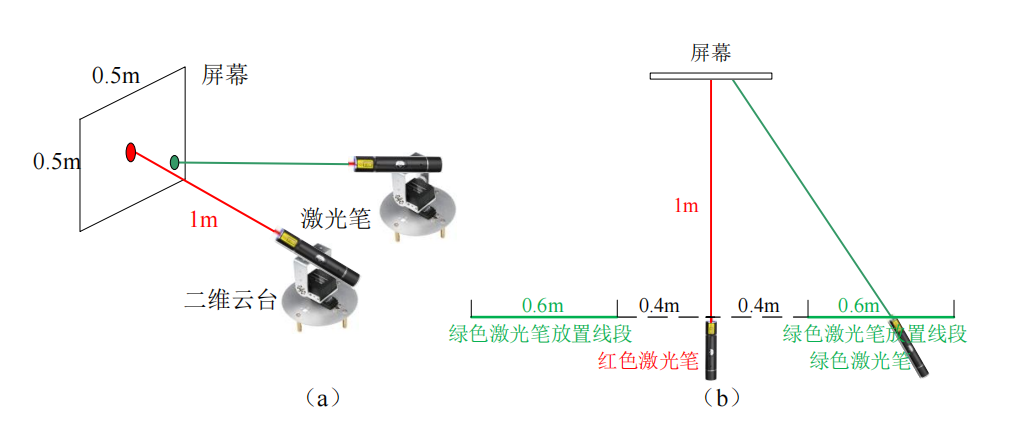
设计制作一个模拟目标运动的红色光斑位置控制系统和指示自动追踪的绿色光斑位置控制系统
三、题目分析
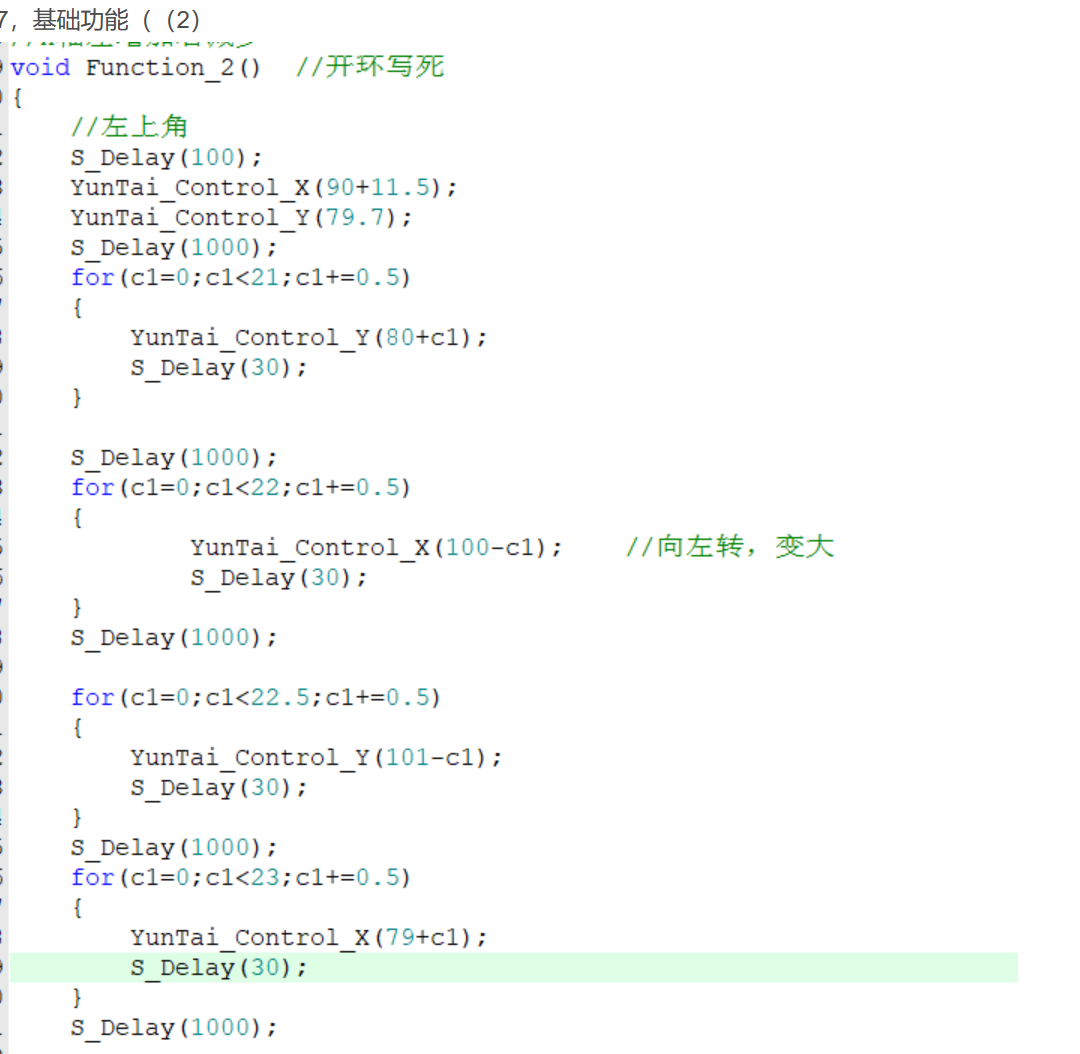
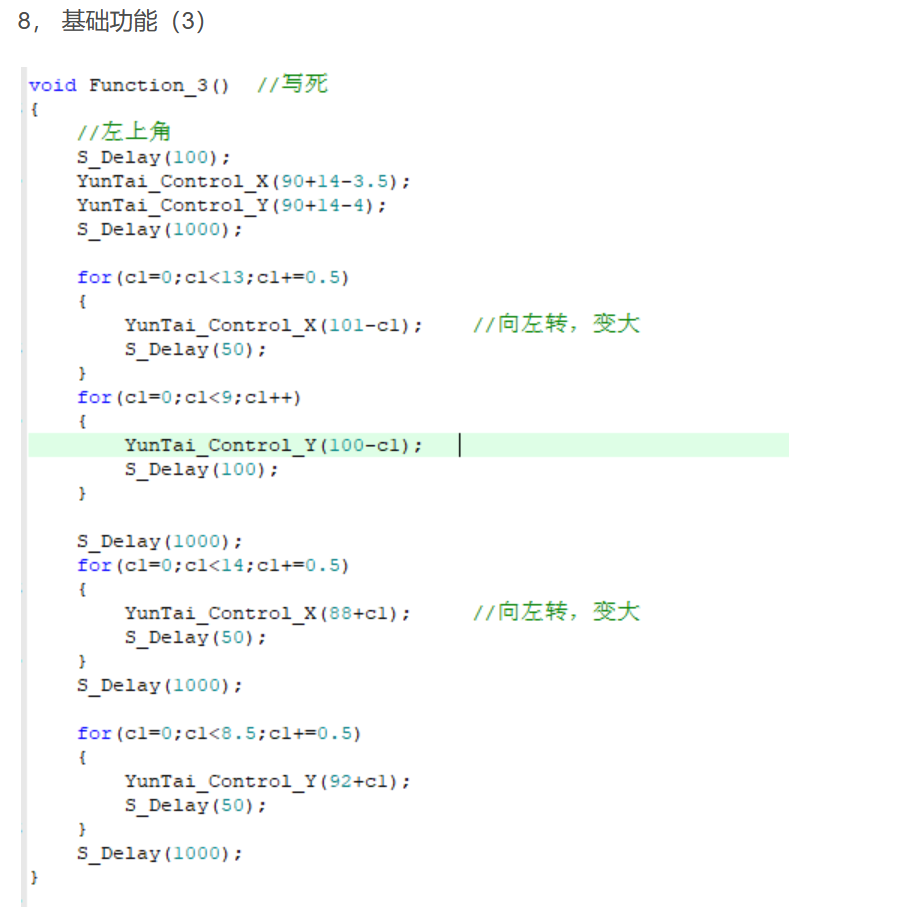
如果开环写:首先将激光笔放在舵机云台上,红色激光中心点对准纸张中心点,所有参数矫正好,这样,基础1第一的问题就完成了,执行复位程序,让舵机指定该角度即可;其次,第二问第三问,相当于一个问题,指定矩形位置和长度,进行控制,建个模型
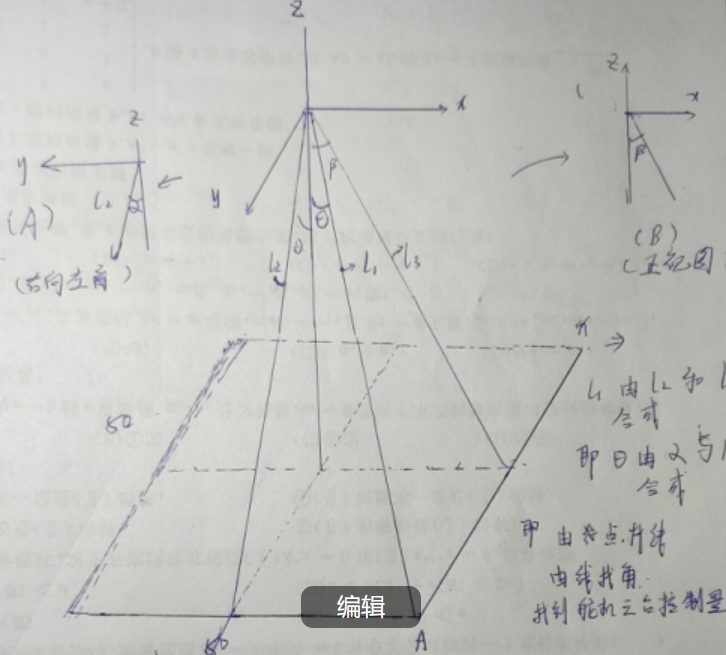
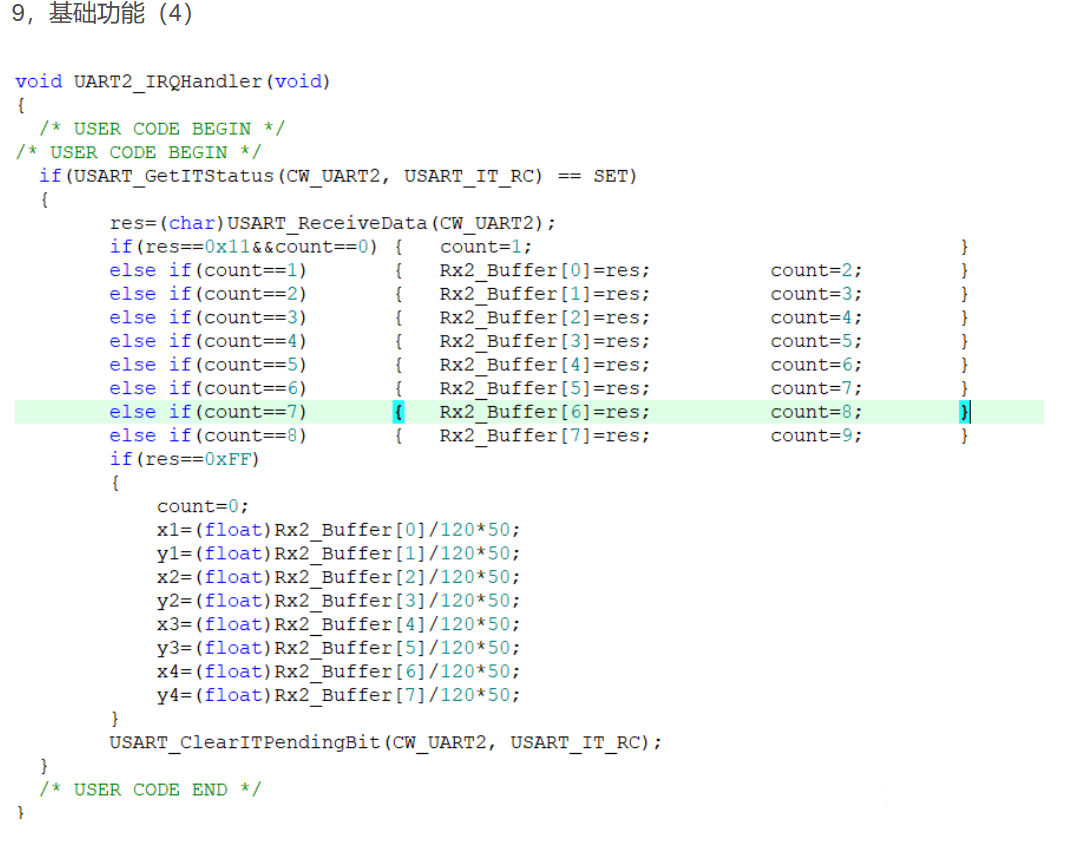
假设从上往下看,板子位于底板上,舵机云台在上方,他们(x,y)坐标均为(0,0),如果红色激光想达到A点,空间线反推一下分别投影到yoz平面上,xoz平面上,即可用反正切函数算出舵机云台x,y轴转动角度,用cw32030c8t6控制舵机精确转动即可让激光打到A点,另外发现红色激光沿着边长移动时,总会一个角不变,所以就可以简单点,不必离散点计算,让程序递进控制一个轴即可。按照这个思路,第(2)(3)要求就完成了,前提参数调好。第(4)个要求就必须要用到摄像头给出矩形的信息。用摄像头模组实现开环控制不易之处主要在于摄像头识别到黑色矩形的像素坐标与实际坐标的不统一,为解决这个问题,我想到的办法是,将摄像头像素识别框设置到120*120(实测),再把摄像头识别框中心即(60,60)与铅笔画的正方形中心尽量重合,这样像素点的坐标和实际坐标就有一定的比例相关性,举个例子,如果矩形顶点像素坐标为(120,120),那么实际坐标就是(50,50),这样,就可以按照(2)(3)思路,坐标量化成角度。还有一个问题是如何找到倾斜角并走斜线,因为斜着走舵机云台x,y轴都要变化,解决这个问题首先要根据同边两个坐标算出倾斜角,然后利用倾斜角找到x,y控制的比例关系走斜线,形象一点,斜线可以离散成楼梯的一列边沿的点,按倾斜角度得出楼梯的长和宽,再控制舵机的x,y倾斜角,程序不断递进即可走一条斜线,解决以上问题,理论上能做到画随意角度,随意位置的矩形,不过实属不易,摄像头识别不出红色激光点或误差较大只好采用。
如果闭环写:摄像头识别正方形铅笔线,给出4个点像素坐标,人为再这几个点之间加坐标,以便走的丝滑,让这些坐标按顺序作为舵机x轴,y轴pid的目标值,红色激光位置实时反馈,调好参数,即可由点成线,完成走矩形,(2)(3)(4)均可如此。(理论构想,因比赛过程对摄像头认识不足获取不到稳定坐标信息而未实现)
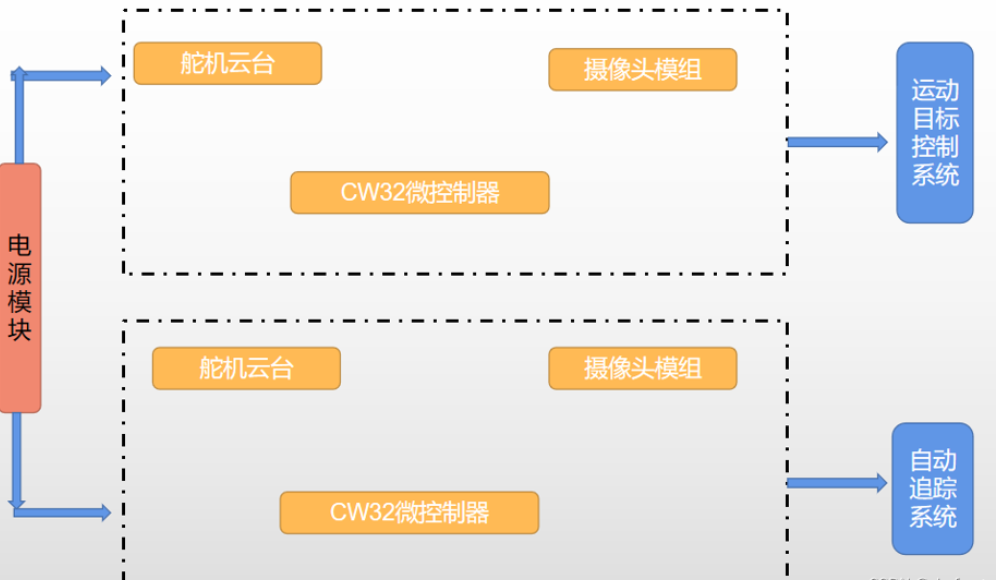
五、总体设计框图
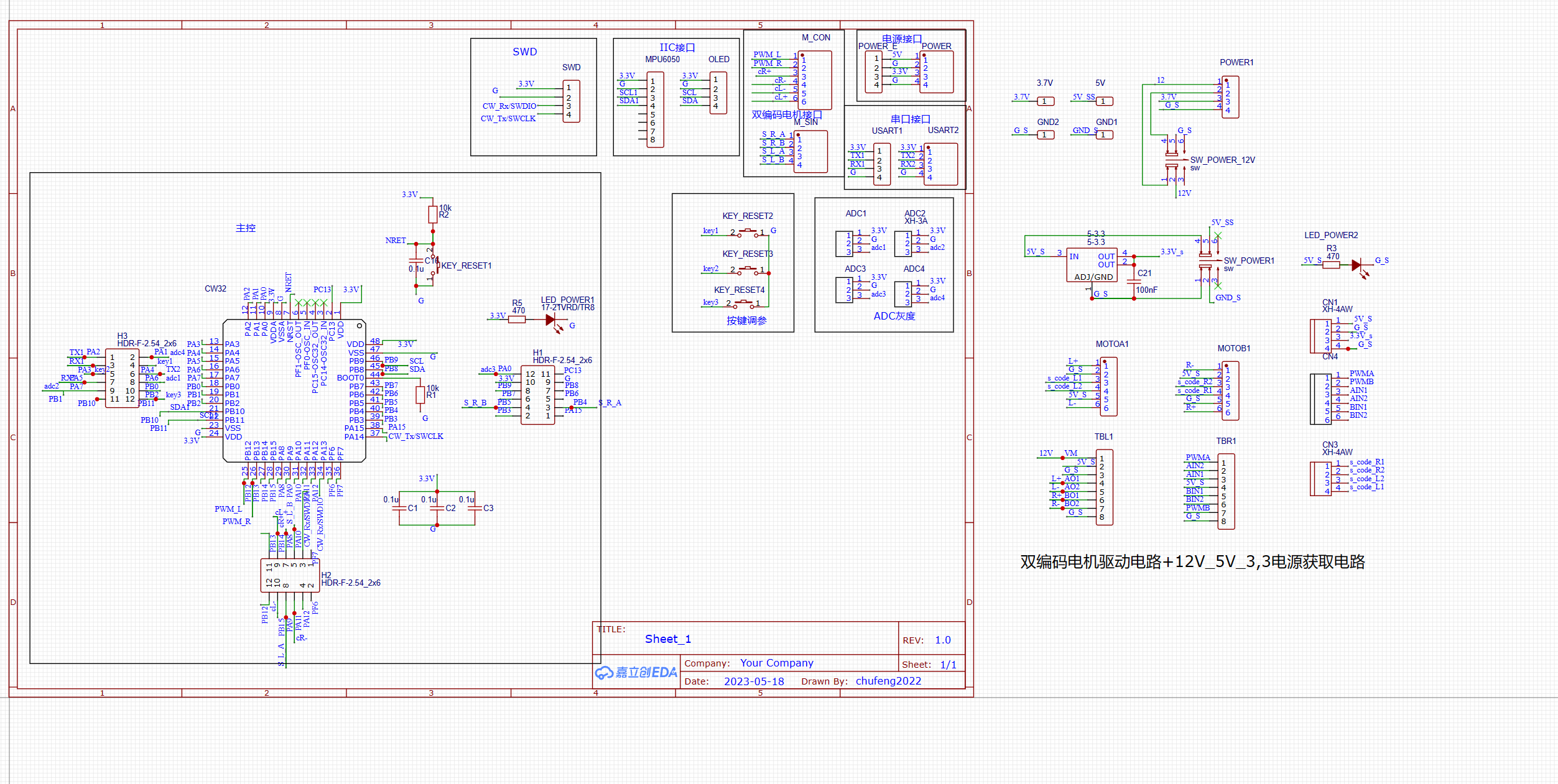
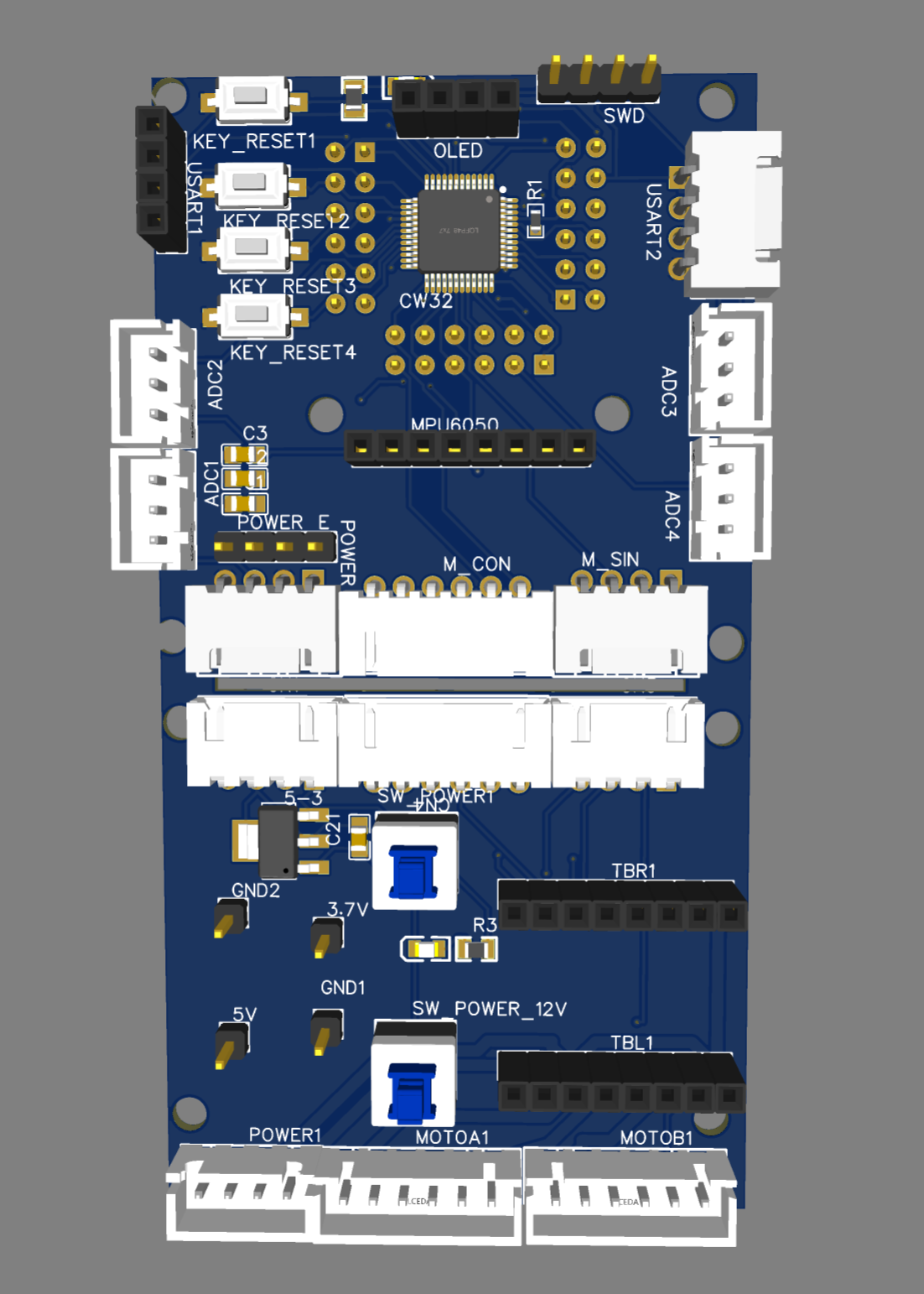
六、硬件电路组成
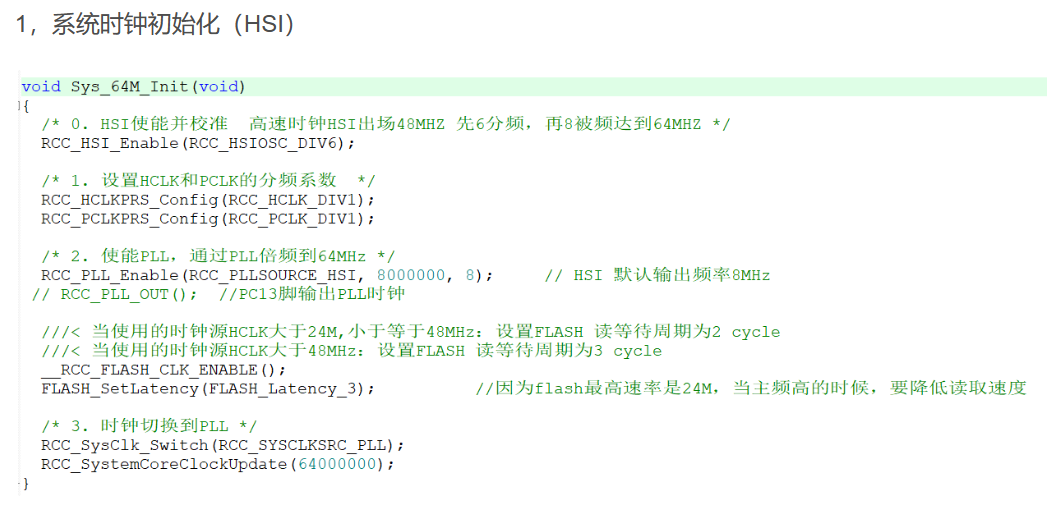
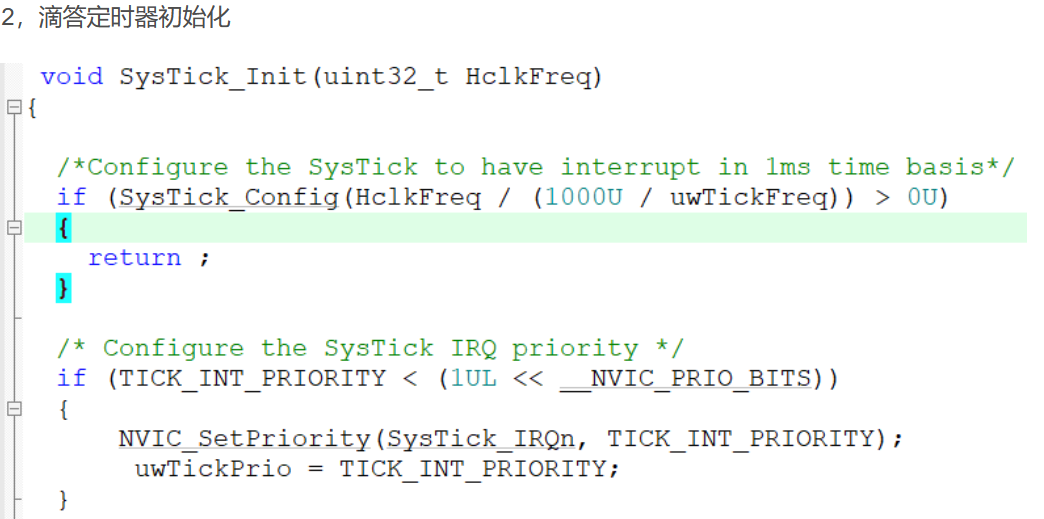
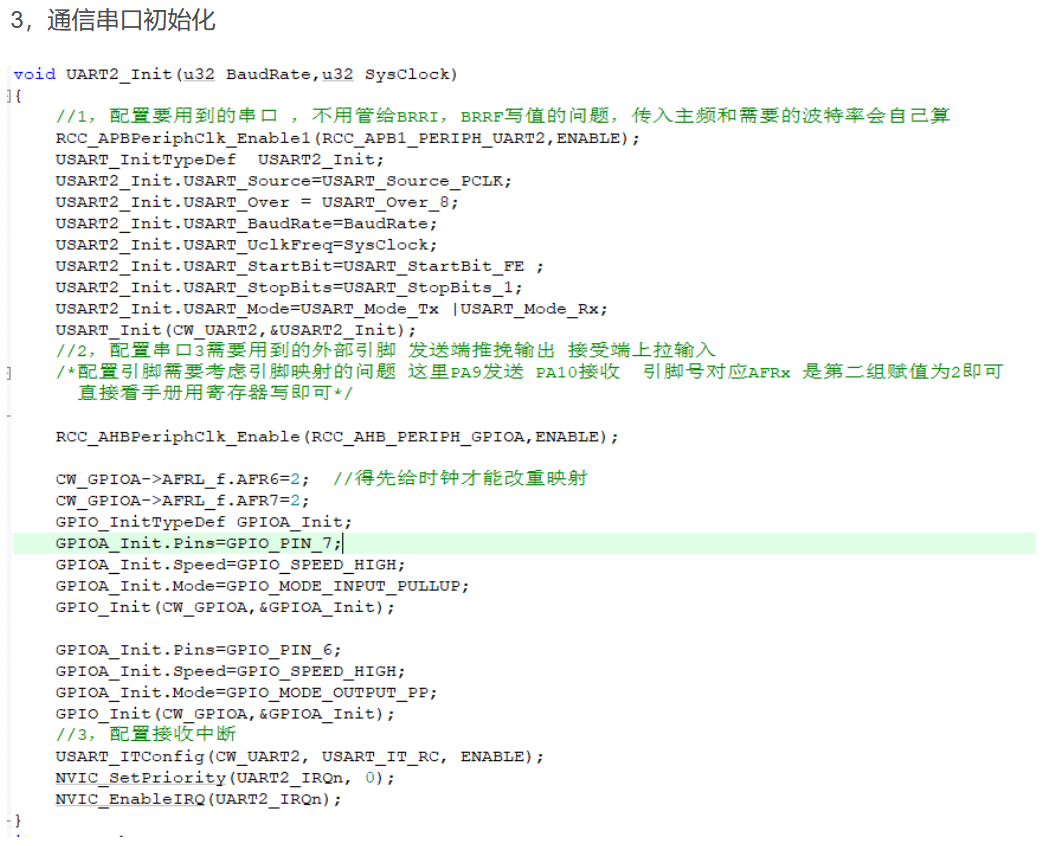
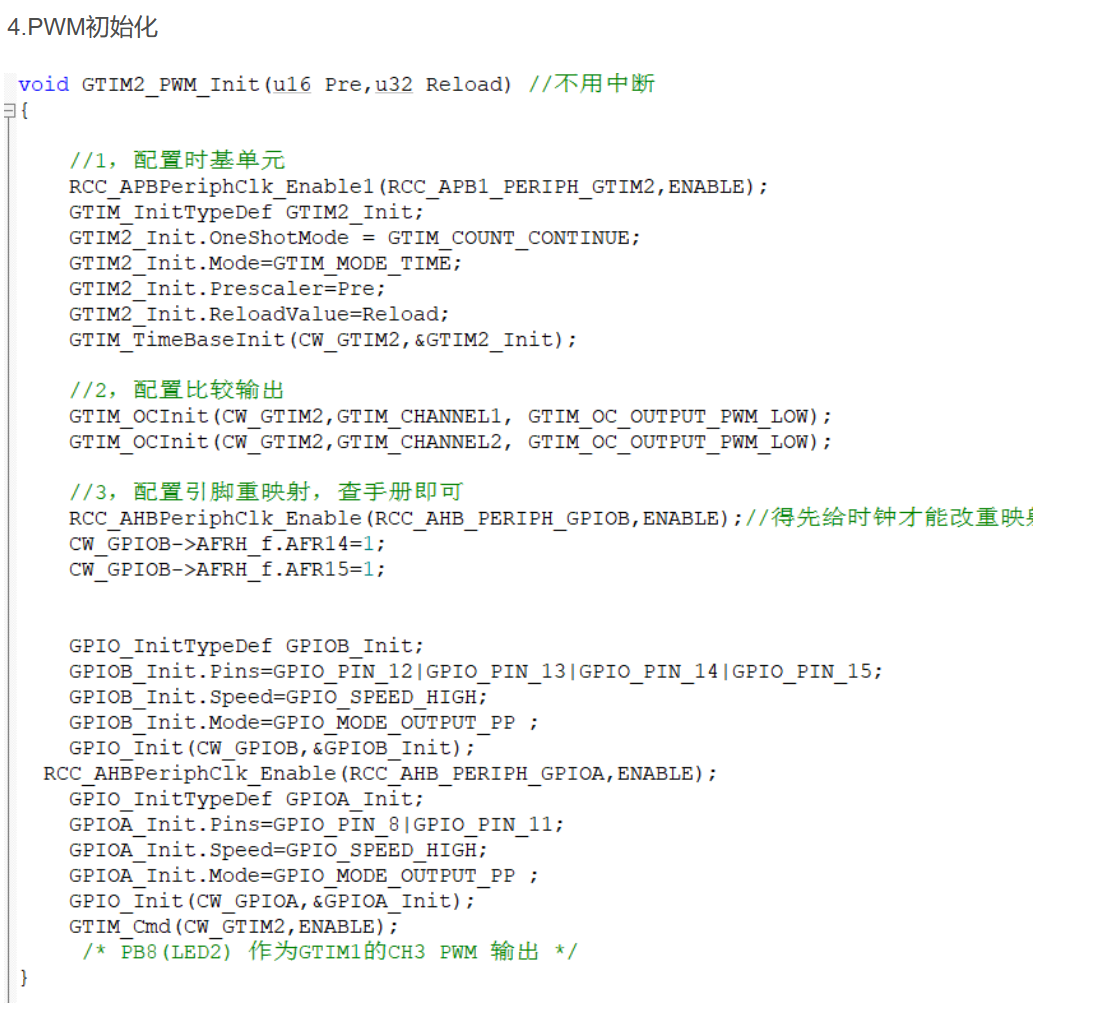
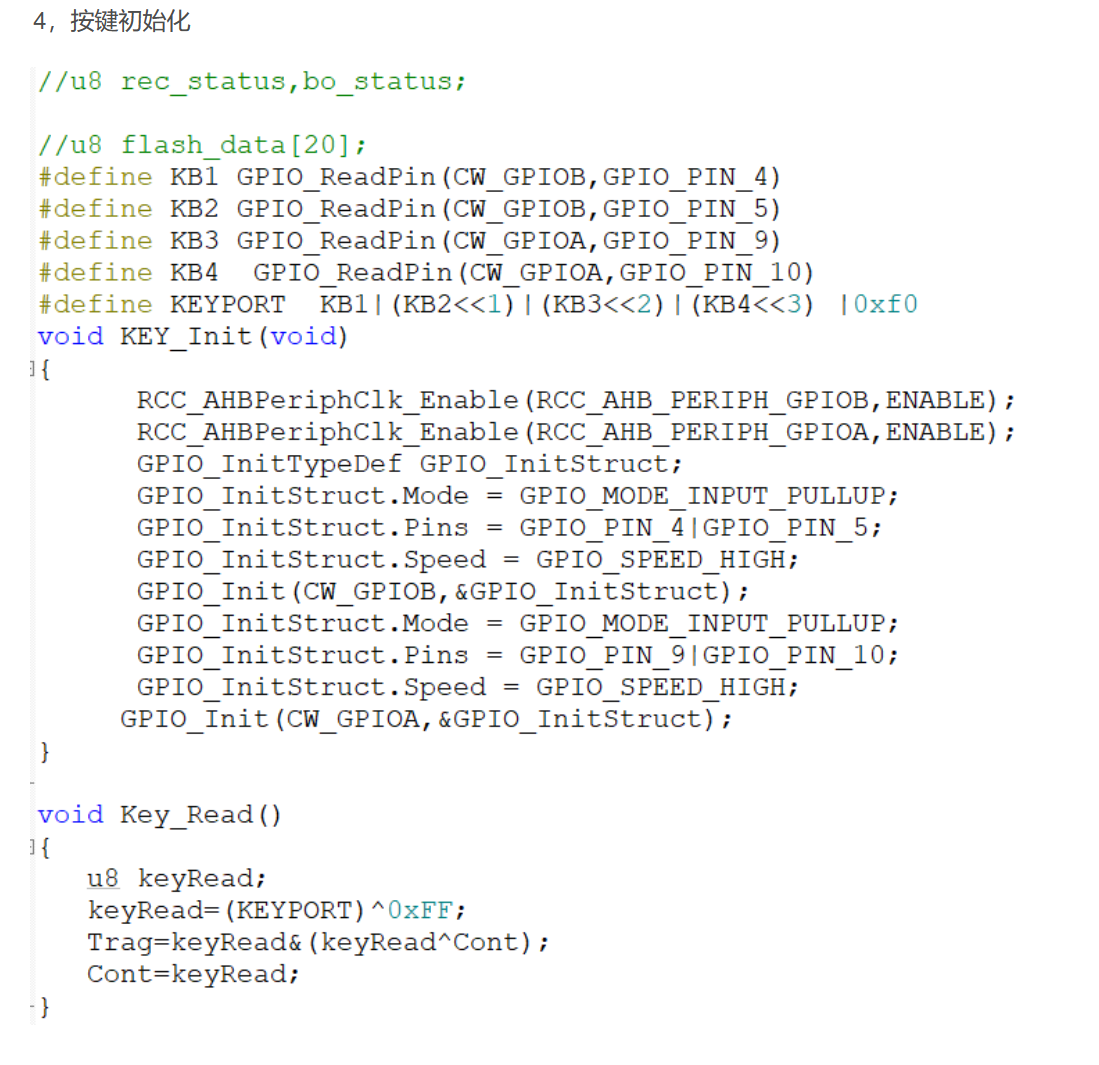
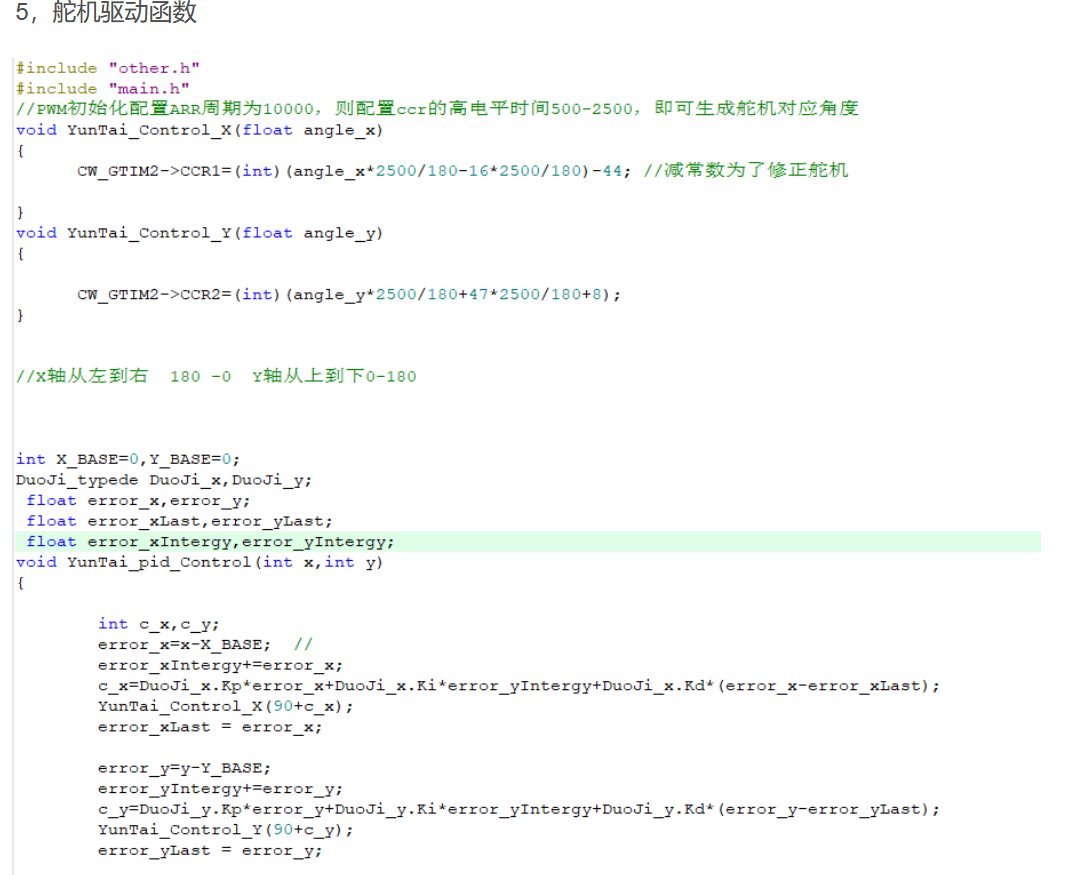
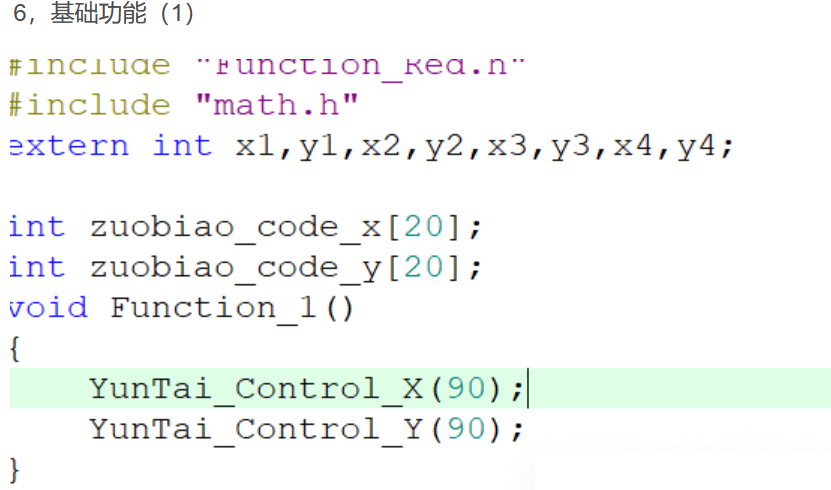
七、程序代码:
审核编辑 黄宇
-
电子设计大赛真题2012-07-28 0
-
全国大学生电子设计大赛题2012-12-02 0
-
全国电子设计大赛题目.2013-05-23 0
-
电子设计大赛历年真题2013-05-26 0
-
求07年全国电子设计大赛(E题)开关稳压电源的 原理电路图2013-07-31 0
-
历届电子设计大赛赛题,,,,2013-08-25 0
-
2013年电子设计大赛必备资料2013-08-31 0
-
2013全国电子设计大赛复测题2013-11-29 0
-
2006年黑龙江电子设计大赛A题的论文设计及电路图2014-07-22 0
-
备站2015电子设计大赛分析往届控制题2015-08-10 0
-
谁有2016年TI杯的大学生电子设计大赛E题的电路图,程序以及元器件清单2019-06-14 0
-
武汉芯源半导体CW32 MCU助力2023年第二届“圆梦杯”大学生智能硬件设计大赛2023-05-22 0
-
2023电赛A题国奖CW32 开源分享2023-11-02 783
-
基于CW32的物联网应用2023-11-02 335
-
2023年电子设计大赛G题火源设计方案2023-11-03 598
全部0条评论

快来发表一下你的评论吧 !
