

感应电动机的工作原理
描述
第一步:准备线圈和铁芯。其中线圈作为电路的载体,提供通电导体;铁芯作为磁路的载体,提供电磁铁。
第二步:把线圈绕成一圈圈(绕组)套在铁芯上后,固定在机壳上称为 定子 ,另一组可以用线圈绕成绕组(绕线式),也可以用导条做成笼子(鼠笼式),套在轴承上称为 转子 。装配在一起组成电机,定子与转子中间留有气隙。
第三步:给定子的三相绕组通三相对称交流电,则这个通电导体在电机气隙里就形成了旋转磁场,因为交流电的频率为f(一般为50Hz),所以在一个极对数(P=1)情况下,这个旋转磁场的转速就是一秒钟转50个2π弧度(360°,一圈),可以知道,旋转磁场的转速n0=60f/P(转/分钟),称之为同步转速。
第四步:现在定子产生的磁场在旋转,所以转子被迫切割磁感线,在转子的导条上就感应出电动势,根据右手定则,可以判断出转子导条上电流的流动方向,转子导条变成通电导体,根据左手定则,可以得出导条受到力的作用的方向,可以看出来,此时转子的受力方向和磁场的旋转方向一致。
第五步:转子开始旋转,假设它转到和磁场旋转的转速(也即同步转速)一样快,此时导条不能切割磁感线,转子不再受力,所以转子的转速n(电动机的转速)接近同步转速而又小于同步转速n0,两者有一个转速差,差的程度我们用转差率来描述,转差率s=(n0-n)/n0。所以感应电机是异步电机。
第六步:现在转子能转起来了,总不能空转吧,我们给它带负载转,比如说电葫芦,电风扇叶啥的,可是给它带多大的负载合适呢?我们需要知道它的额定输出功率和输出转矩,现在**输入电功率(P1=3U1pI1p*cosφ=√3*U1l*I1l *cosφ )我们是知道的,只要知道哪些是被损耗了,就能知道输出功率P2了。
第七步:我们看到感应电机和变压器几乎一样,都是靠电磁感应工作,这里就套用变压器的分析方法来分析感应电机,先画出感应电机的T型等效电路,变压器那里二次侧负载归算到一次侧用的是匝数比归算,即R2’=k²*R2,感应电机这里用转差率归算为R2’/s,我们分解为:R2’/s=R2’+(1-s)/s* R2’,这样分解成转子铜耗部分和机械消耗部分,T型等效电路如下:
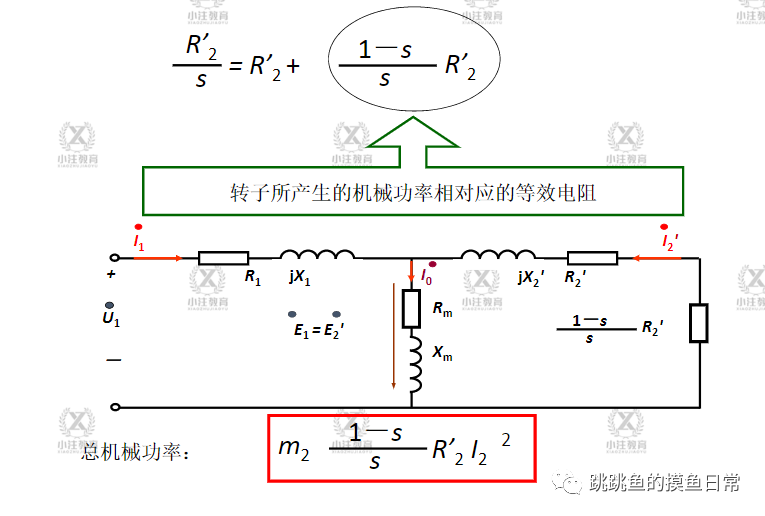
第八步:这样,我们就能计算了,下面我们统一采用相电压和相电流计算, 输入电功率P1=3U1I1*cosφ。定子铜耗:Pcu1=3*I1²*R1,
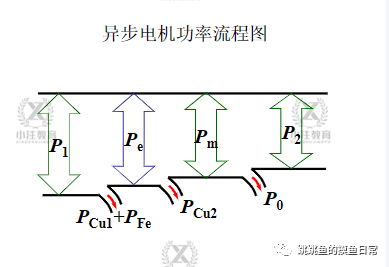
因为转子转速和旋转磁场的相对转速小,所以转子铁耗可以忽略,铁耗约为:Pfe=3I0²Rm,这样输给转子的电磁功率Pe=P1-Pcu1-Pfe,这是从定子这一端看的,从转子这一端看,电磁功率Pe=3*I2²*R2’/s,如第七步所述,这部分功率分解为转子铜耗和机械消耗,Pe=Pcu2+Pm,其中Pcu2=3*I2²*R2’=sPe,Pm=3*I2²*R2’*(1-s)/s=(1-s)Pe。现在我们知道转子的机械功率了,减掉空载损耗P0,剩下的就是给负载的输出功率P2了,P2=Pm-P0=P1-Pcu1-Pfe-Pcu2-P0。功率流程如下,小口诀:“输入电磁机械出”。
第九步:当我们得到了电机的输出功率,那显然,输出转矩T2=P2/Ω,Ω为角速度x1rad/s,转速n的单位为x1r/min=x2π rad/60s。Ω/n≈9.55,所以 T2=9.55*P2/n ,其他像电磁转矩Te、空载转矩T0都与之雷同。
第十步:现在,装上合适的负载,配上控制回路,我们就可以控制电机了,按下电机启动按钮,我们发现,电机的启动电流很大,启动电流Ist=(5.5~7)*In,忽略励磁支路的影响,则它的启动电流为Ist=U1/丨Z丨=U1/√(R1²+R2’²)+(X1²+X2'²)。
第十一步:要避免电机频繁启动过热和对电力系统的冲击,需要减小启动电流,对于转子为绕线式的,我们完全可以在转子电路串电阻来减小启动电流,此时 临界转差率Sm增加(Tm最大时的转差率),而最大电磁转矩Tm不变 。而对于鼠笼式,因为转子无法串电阻,假如电机容量小,就直接启动,对于电机容量大的鼠笼电机,需要在定子端降压启动,减压启动的方式包括:定子串电阻启动,自耦变压器启动,Y-△启动,延边三角形启动。
第十二步:定子串电阻,利用电阻来分压很好理解,自耦变压器变压时,设变压器变比为Ka,要降压显然Ka<1,Ka=U1/Un,I=U²/R,T∝U²,所以 Ista=Ka²*Ist;Tsta=Ka²*Tst。重点看最常用的Y-△启动,Y型启动时,我们学过,Ul=√3*Up,(且超前Up30°),Il=Ip,此时IstY=Ul/(√3*丨Z丨),△运行时,Ul=Up,Ist△=√3*Ip=√3*Ul/丨Z丨;显然, IstY=Ist△/3 ,由T∝U², TstY=Tst△/3 ,(这里可以类比Ry=R△/3来记忆,外大内小)。至于延边三角形启动,则是星三角启动和自耦变压器启动的结合。
第十三步:电机解决启动电流过大问题顺利启动后,电机处于平稳运行状态,给它带不同的负载,观察它的运行特性如下:
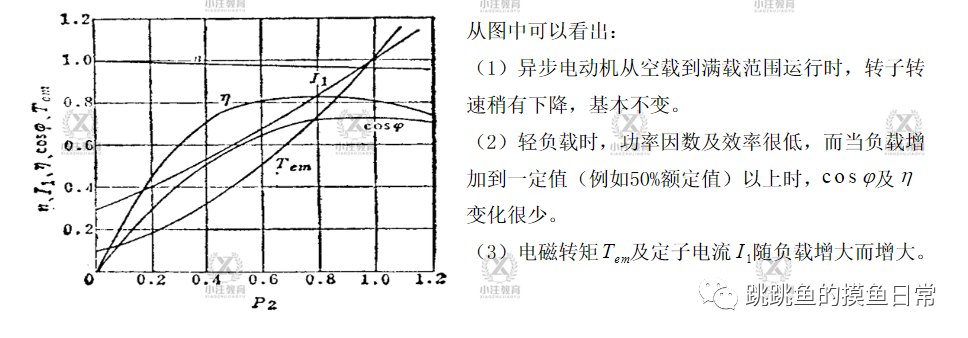
可以看出,随着负载增加,转速基本不变,效率和功率因素到50%后也变化很小,但是电磁转矩和定子电流会增加,相当于负载增加了,需要的能量和力量要变大才能带起来。
第十四步:现在我们还需要能调节它转的快慢,根据前面的n0=60f/P,s=(n0-n)/n0,可得:n=(1-s)*60f/P ,所以可以通过改变P,f,s来调速,极对数P为离散型变量,所以调P称为有级调速,调f或s为无级调速。以调s为例,这里常用的为绕线式异步电机转子串电阻调速,转子串入电阻R2,临界转差率Sm增加,最大电磁转矩Tm不变,即 **Sm∝R2’,根据转矩平衡,S/Sm= (R2'+Rs') /R2';而Tm与R2’无关,但增加R2’,转速下降,而启动转矩增加,所以适用于起重机调速。
第十五步:现在我们能调速了,假如遇到紧急情况,怎么让电动机停下来呢?就是怎么给电机"踩刹车"?第一种,切断电源,把定子绕组接到直流电上,产生静止的磁场,n0=0, n>n0,s<0,此时如果有能量能一直推动转子转动,则感应电机将一直感生出电动势,处于发电机状态。 如果没有外在能源,Te与n反相,电机停机,称为 能耗制动。 或者我们改变输入电源的任意两相,n0与n反相,设n0为正,则此时 n<0,s>1,电机处于电磁制动状态 ,称为 反接制动。 又或者电源不变,n0不变,但是给个外在的动力给转子,使得 n>n0,s<0 ,此时n与T也反相,称为回馈制动。
-
三相感应电动机的基本工作原理(2)#硬声创作季jf_49750429 2022-12-01
-
电机学:三相感应电动机的基本工作原理#电机学习电子 2022-11-09
-
三相感应电动机的基本工作原理(1)#硬声创作季jf_49750429 2022-12-01
-
不同电动机的工作原理(动态GIF图片演示)2018-07-26 0
-
感应电机的基础知识汇总2020-08-25 0
-
感应电动机的工作原理2021-02-02 0
-
感应电动机和异步电动机有何区别2021-09-06 0
-
模拟一台感应电动机2021-09-06 0
-
感应电动机的转速―转矩特性详解2023-03-14 0
-
干货 | 感应电动机的基本结构与工作原理2021-01-22 2400
-
感应电动机的工作方式 感应电动机的特性和参数的测定方法2023-03-04 2097
-
三相感应电动机的工作原理2023-03-10 2952
-
三相异步电动机的工作原理和接线方法2023-03-23 5376
-
感应电动机的工作方式是什么 感应电动机的基本工作原理2023-09-13 448
-
感应电动机的基本工作原理及工作方式2023-09-19 2946
全部0条评论

快来发表一下你的评论吧 !
