

机器人阻抗控制有几种方法
描述
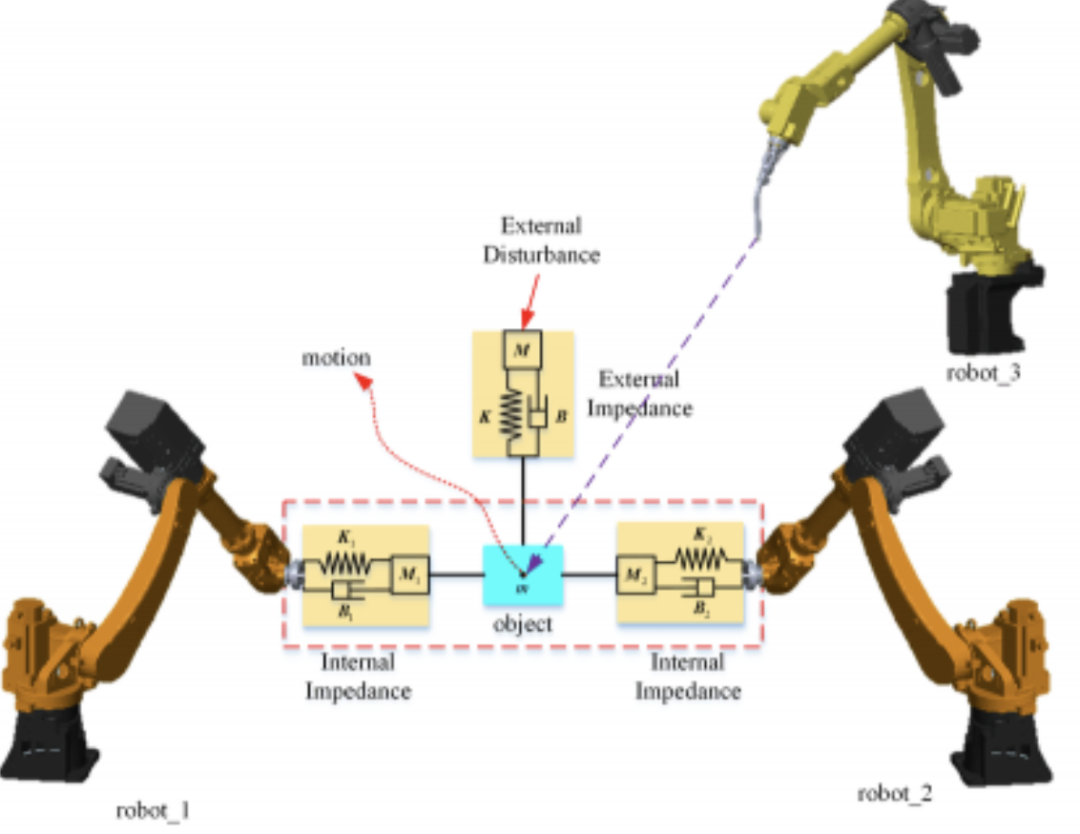
在工业机器人中,阻抗控制是一种非常重要的控制方法,主要用于控制机器人的力和位。通过调整阻抗,机器人可以更好地适应不同的操作环境和任务需求。
阻抗控制的基本思路是:建立一个期望的机器人位置和接触力的动态响应关系,通过改变阻抗,可以调节机器人与外界的动态作用。
一般来说,机器人阻抗控制主要分为两种方法:基于位置的阻抗控制和基于力的阻抗控制。
1.基于位置的阻抗控制:让机器人电机在位置模式下工作,通过发送目标位置和速度实现阻抗特性。这种控制方式主要是为了控制机器人的位置精度和运动轨迹。
2.基于力的阻抗控制:需要让机器人的电机处于力矩模式工作,需要考虑机器人的动力学模型,直接计算出需要的力矩给驱动器。这种控制方式主要是为了控制机器人与环境之间的作用力和反作用力,从而实现更好的顺应性。
在基于力的阻抗控制中,需要使用到机器人力传感器来测量机器人与环境之间的作用力。
通过这种方式,机器人可以更好地感知其操作环境,并根据实际需要对力和位置进行更为精准的控制。
力觉传感器在机器人的主动柔顺控制中起着至关重要的作用,它们是实现机器人力控制性能必不可少的部件。六维力传感器是目前在机器人力控解决方案中应用最为广泛的力觉传感器。
六维力传感器能够同时提供更全面的力信息。这些信息对于实现机器人的精确操作和适应各种不同的任务场景至关重要。
相比之下,电流环在响应精度和速度上均低于力传感器,因此其适用场景相对有限。
尽管电流环的成本可能较低,但在需要更高精度和更快响应速度的应用中,力传感器通常是更好的选择。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
如何远程控制机器人?2014-10-25 0
-
什么是工业机器人2015-01-19 0
-
机器人视觉——机器人的“眼睛”2015-01-23 0
-
【机器人在线】一种新型串并联六自由度喷涂机器人误差建模引言2017-07-14 0
-
机器人的主要技术参数2017-08-15 0
-
先进机器人控制2017-09-19 0
-
工业机器人的工作原理2017-12-15 0
-
给机器人以平衡感的各种方法测量倾角的传感器2018-10-30 0
-
机器人基础书籍2019-05-22 0
-
如何设计智能灭火机器人控制器?2019-07-31 0
-
有什么方法可以实现服务机器人的运算与控制?2019-10-16 0
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 0
-
什么是机器人控制系统2021-10-11 0
-
机器人是什么?2022-03-31 0
-
阻抗控制的特点及阻抗控制的实现方法2019-09-25 16245
全部0条评论

快来发表一下你的评论吧 !
