

位移、速度和加速度与阻抗参数之间的关系
描述
在运动中,位移、速度和加速度与阻抗(惯性、阻尼、刚度)之间存在一定的关系。阻抗控制是一种控制方法,旨在通过调节阻抗参数来实现所需的运动特性。下面是位移、速度和加速度与阻抗参数之间的关系:
1. 位移与刚度(Stiffness)的关系: 刚度描述了物体对位移变化的抵抗能力。较大的刚度值会使得物体对位移变化更为刚性,即物体更难产生位移。
2. 速度与阻尼(Damping)的关系: 阻尼描述了物体对速度变化的抵抗能力。较大的阻尼值会使得物体对速度变化更为阻尼,即物体的速度响应趋于平稳。
3. 加速度与惯性(Inertia)的关系: 惯性描述了物体对加速度变化的抵抗能力。较大的惯性值会使得物体对加速度变化更为惯性,即物体的加速度响应趋于平缓。
以下为简单的单自由度机器人阻抗控制MATLAB程序示例:
% Set simulation time
T = 1000;
dt = 0.001;
% Set desired trajectory
xd = sin(linspace(0, 10, T));
dxd = cos(linspace(0, 10, T));
ddxd = -sin(linspace(0, 10, T));
% Set impedance parameters
Md = 1;
Bd = 10;
Kd = 400;
% Set initial conditions
x0 = 0;
dx0 = 0;
% Initialize variables
x = zeros(1, T);
dx = zeros(1, T);
f = zeros(1, T);
x(1) = x0;
dx(1) = dx0;
% Simulate impedance control
for i=1:T-1
% Compute desired end-effector acceleration
ddx_d = Md (f(i) - Bd*(dx(i) - dxd(i)) - Kd*(x(i) - xd(i)));
% Update end-effector velocity and position
dx(i+1) = dx(i) + ddx_d * dt;
x(i+1) = x(i) + dx(i+1) * dt;
end
% Plot results
tiledlayout(2,1);
nexttile;
plot(x);
hold on;
plot(xd);
title('Position');
nexttile;
plot(dx);
hold on;
plot(dxd);
title('Velocity');
仿真结果如下:
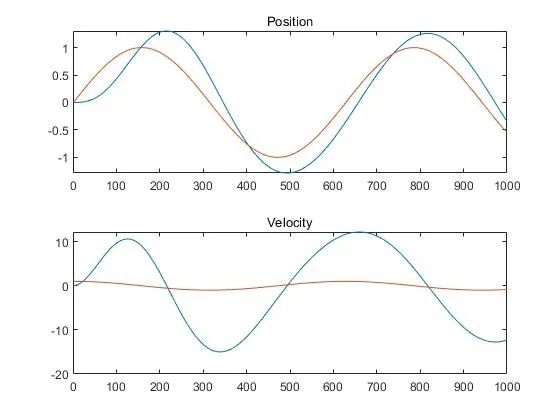
程序设置了仿真时间、期望轨迹和阻抗参数。然后,使用阻抗控制算法来计算末端执行器加速度,并更新末端执行器速度和位置。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
c语言中通过加速度求位移怎么实现2015-07-21 0
-
已有频率与加速度功率谱密度的数据,怎么得到时域和加速度的关系图2015-08-19 0
-
加速度、速度、位移的算法2018-01-16 0
-
加速度计的技术规格详解2018-10-18 0
-
低频光纤光栅加速度传感器2018-10-29 0
-
如何测量汽车刹车踏板的位移和加速度2019-07-19 0
-
加速度传感器的选型2020-08-11 0
-
气轨上测量滑块的速度和加速度2009-06-09 923
-
基于单片机的发动机振动速度、位移和加速度测量方法2009-08-10 746
-
在气垫导轨上测速度和加速度2009-11-03 678
-
labview中位移+速度+加速度采集显示(一阶导、二阶导)2016-05-06 2610
-
位移+速度+加速度采集(反馈节点形式)2016-05-06 785
-
如何选择合适的加速度传感器2020-01-17 1617
-
细说振动位移、速度、加速度 理解轴承使用三大误区2022-07-22 3210
-
加速度传感器的基本力学模型是什么2024-01-17 355
全部0条评论

快来发表一下你的评论吧 !
