

小鹏G6电子架构与ADAS系统分析
汽车电子
描述
最近小鹏和问界的AEB测试非常引人瞩目,媒体的黑暗测试环境中,小鹏G6进行30km/h测试时,完全没有反应,直接撞上了假车,驾驶员踩下刹车才刹停;作为对比,问界M5 EV从30km/h到80km/h全部一次性成功刹停。实际上,问界M5并没有采用华为的ADS 2.0,问界M5采用的是博世的ADAS系统,阿维塔11才是华为的ADS2.0。
小鹏G6的前视双目
小鹏G6的前视双目并非华为那种立体双目,应该就是一个远距离摄像头,一个近距离摄像头。如果是立体双目,那么双目之间的距离至少也在8厘米之上,这个显然没有。小鹏的双目都是800万像素。
阿维塔11的立体双目
小鹏G6的电子架构与其他车厂最大区别是引入了左右域控制器架构,有点类似特斯拉的左右域控制器架构,实际上这算不得先进,只是将传统的车身域控制器按物理位置一分为二,分开的话,主要是节约线束成本,减少装配时间。
根据JT269.com提供的小鹏G6的电路图,我们可以大致分析出小鹏G6的电子架构。小鹏G6电路图的智能驾驶部分分别是中距离毫米波雷达、短距离毫米波雷达、盲区侦测系统、全景影像AVM系统、倒车雷达PAS系统、XPU系统、自动泊车系统。再根据小鹏G6的CAN总线分布图,可以看出,小鹏将智能驾驶、座舱和中央网关集成在一起,称之为中央域控制器,这与蔚来的ES8非常接近,二者颇有点中央集中计算架构的意味,但这和真正的中央集中计算架构相差甚远,真正的中央计算架构是所有计算包括车身域的计算均由中央计算处理器负责,骨干网是超过10Gb的车载以太网,使用自适应AUTOSAR,每个区域Zone都只有控制MCU,这是汽车电子架构的终极模式,只有这样才能实现真正的软件定义汽车,不过这种架构目前还未出现,估计要等到2027年量产车上才有可能出现。
虽然中央计算域包括了智能驾驶和座舱,但电路图上还是分开描述,这和蔚来ES8还是不一样,蔚来ES8从头到尾都未分开描述。
小鹏G6的角雷达和前向主雷达架构
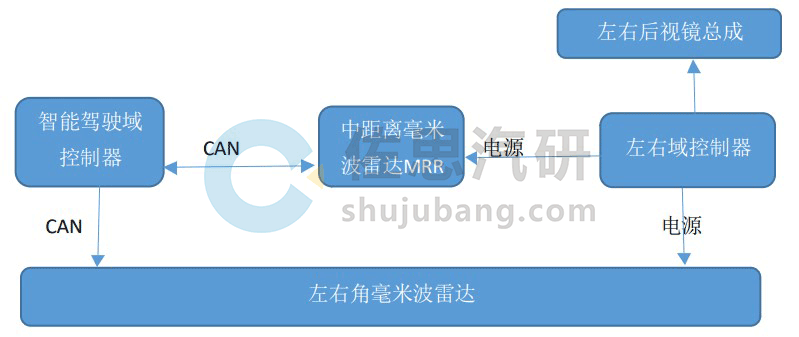
来源:佐思汽研
根据MRR的名字,不难猜测这极有可能是博世的MRR中距离毫米波雷达,有效距离160米,国内几乎80%的车型包括问界M5都使用了这颗毫米波雷达,原因估计是性价比比较高。而左右域控制器只是供电,左控制器供应左侧雷达,右控制器供应右侧雷达,这就是传统的ECU,没有车载以太网,叫域控制器名不副实。
小鹏G6环视部分
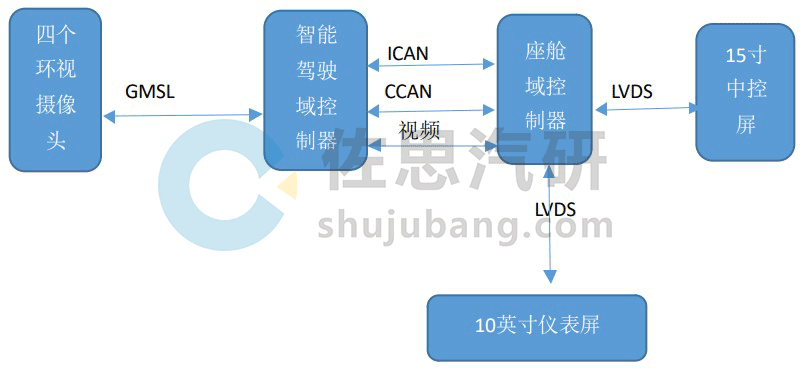
来源:佐思汽研
环视部分是交给智能驾驶域控制器负责,而不是常见的座舱域控制器负责。
小鹏G6智能驾驶域控制器架构图
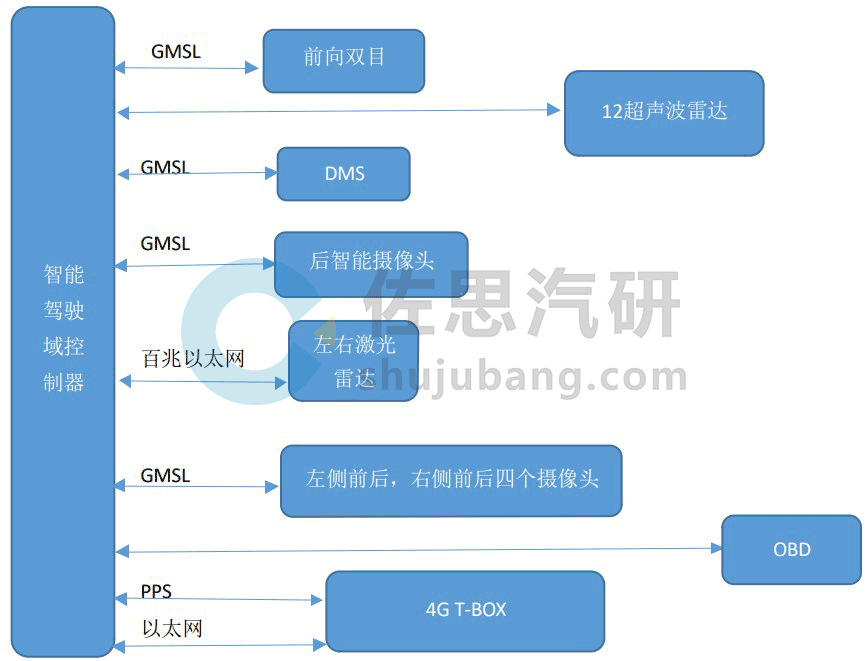
来源:佐思汽研
后智能是两颗摄像头,但是是一路输入,似乎是可以选择输入。ADAS摄像头包括前双目、车身两侧四个摄像头、后摄像头、360环视,共11个摄像头,除前双目为800万像素,其余都是200万像素,还有一个车内的DMS摄像头。智能驾驶也负责自动泊车,是典型的行泊一体设计。
前大灯下是激光雷达,激光雷达是速腾聚创的MEMS激光雷达,安装位置比较低,可以有效覆盖车身周围,而车顶激光雷达则有明显的盲区,速腾聚创几乎拿下了大部分中国车厂的激光雷达订单,除了理想、蔚来,其余厂家的激光雷达基本都是速腾聚创提供,包括比亚迪、极氪、广汽、上汽智己、小鹏、吉利路特斯,长城近期也从Ibeo转投速腾聚创。国际车厂中,丰田和Lucid也选了速腾聚创。比亚迪发布的百万豪车仰望U8,搭载3颗来自速腾聚创的激光雷达。
小鹏G6的底盘部分
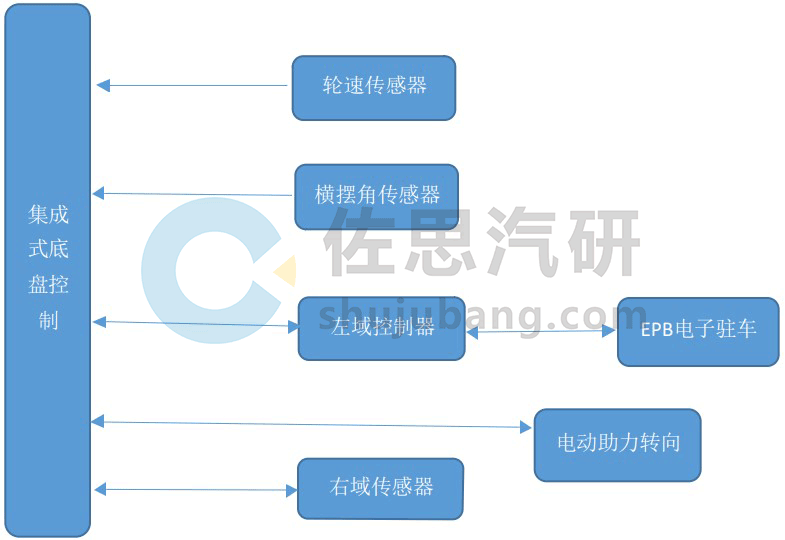
来源:佐思汽研
小鹏G6底盘集中控制应该是包含了iBooster和ESC。
小鹏使用了双Orin做智能驾驶处理器,号称算力高达508TOPS,而问界M5是博世那一套,毫米波雷达与小鹏一致,视觉部分是博世的MPC3一体机,只有CAN输出,类似于Mobileye的黑盒子。
MPC3参数
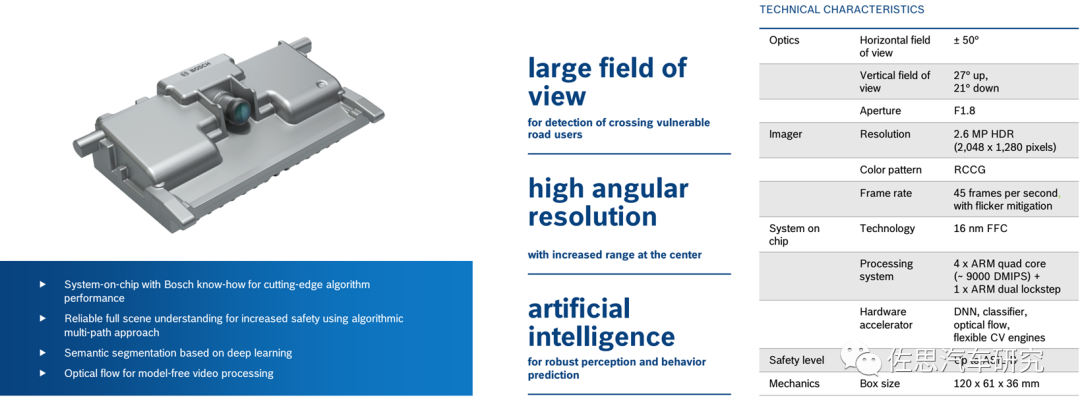
图片来源:博世
MPC3参数如上,使用安森美AR0233图像传感器,260万像素,采用3.0微米背照式(BSI)像素,提供出色的微光性能,单次曝光超过95分贝(dB)。片上高动态范围(HDR)提高微光性能至超过140 dB,或抑制LED闪烁的120dB。安全性是该传感器的核心,该器件符合ISO 26262 ASIL-B标准和AEC-Q100 Grade 2。具有超过8000个注入故障的一个完整的安全封装,可供设计人员使用。目前海外使用EyeQ4的像素都是130万像素,以大众最为普遍,全系列都是法雷奥的EyeQ4,包括奥迪和保时捷。MPC3的核心是日本瑞萨V3H芯片。
MPC3有两个特色,第一就是光流,这可能是单目光流第一次在量产车上使用,光流配合structure-from-motion (SfM)主要用来识别道路中间的突起物,最典型的就是角锥,其次是护栏或隔离栏。
第二个特色是路肩或路沿识别,这也是最早使用语义分割的量产系统,利用语义分割识别路沿,将路上目标与路边目标分离,提高计算效率。
V3H内部框架图
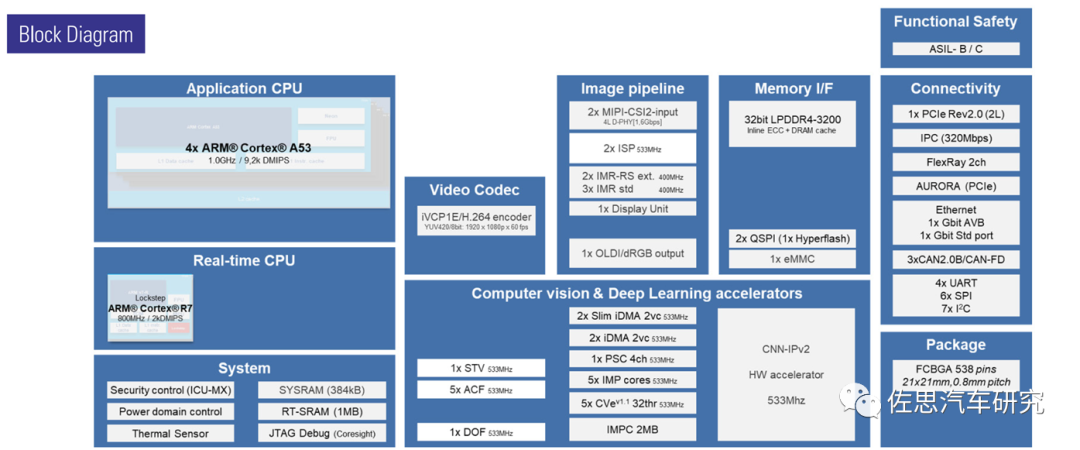
图片来源:瑞萨
V3H采用台积电16纳米FFC工艺制造,AI算力为7.2TOPS@INT8,CPU算力为9.2kDMIPS,双Cortex-R7运行AUTOSAR为2kDMIPS算力,同年推出的Mobileye EyeQ4与V3H差距不小,EyeQ4M AI算力仅为1.1TOPS@INT8, EyeQ4H AI算力2.5TOPS,且都是意法半导体的28纳米FD-SOI工艺。
吉利ICON、博瑞、帝豪S、缤瑞、几何全系列,广汽埃安除几乎没有销量的LX外的全系列、C传祺全系列,长安除UNI-V外全系列,比亚迪宋、唐、海豹,上汽名爵ZS,奇瑞捷途,问界M5,上汽通用五菱大部分,东风岚图,这些车型智能驾驶芯片都是日本瑞萨的V3H,国产厂家除长城大量采用Mobileye EyeQ4外,主流车厂都是V3H。
这背后主要是博世的强大实力,博世的第三代视觉系统MPC3内置了瑞萨V3H。国际市场上,MPC3的主要客户是本田,本田之前也是博世的系统,2023年开始全面引进MPC3。马自达和三菱可能在今年下半年或明年也引进MPC3。V3H成为唯一可以与MobileyeL2领域一争高下的芯片。博世在中国市场风光无限,在欧洲市场不敌法雷奥,法雷奥凭借低价拿下了原本属于博世的大众、奥迪和保时捷的市场。
V3H的算力不到英伟达Orin的1/30,表现则大家有目共睹,堆算力有没有用,相信大家都已经有了答案。
编辑:黄飞
-
基于MATLAB的系统分析与设计——时频分析2012-02-28 0
-
手机硬件系统分析2013-05-03 0
-
[电路与系统分析:使用MATLAB]2013-06-03 0
-
系统分析方法.ppt2017-10-03 0
-
系统分析方法.zip2017-10-04 0
-
【下载】《电路与系统分析(使用MATLAB)》2018-01-23 0
-
ModelSim 电子系统分析及仿真2018-09-11 0
-
指令系统分析2006-03-21 1062
-
系统分析ppt2008-11-07 706
-
什么是系统分析?2008-11-07 2602
-
基于MATLAB的系统分析与设计时频分析2016-01-15 517
-
基于MATLAB的系统分析与设计信号处理2016-01-15 609
-
基于Pspice的电子系统分析2016-02-22 661
-
基于SVPWM的变频系统分析设计2016-04-18 390
-
系统分析方法2017-12-06 692
全部0条评论

快来发表一下你的评论吧 !
