

基于飞控的姿态估计算法作用及原理
军用/航空电子
描述
姿态估计的作用? 姿态估计是飞控算法的一个基础部分,而且十分重要。为了完成飞行器平稳的姿态控制,首先需要精准的姿态数据作为控制器的反馈。
飞控姿态估计的难点? 姿态估计的一个难点主要是一般选用的惯性传感器,都是MEMS器件,精度相对较差;此外,实际工作中很难准确的判定姿态估计的是否准确。 姿态估计的指标? 一般考虑三个性能,收敛性、精确性、准确性。
收敛性:即估计出的姿态角数据不会轻易发散,在动态变化时,能很快的收敛到对应的角度;
精确性:比如飞行器放置不动,此时得到的姿态角在0度左右波动,这个波动范围即考虑的精确性;
准确性:这个比较难以考究,即没办法确定所得到的角度的精确程度。一般用外部参考的方法测量,比如飞机上同时挂载自己的飞控以及高精度的IMU设备(比如xsens、sbg等),飞行完成后,对比自己飞控所解算的角度和外部设备的误差;又或者,在室内装vicon设备来给出外部参考。注意,验证算法的时候,最好还是用实际飞行的数据,否则加速度噪声对算法的影响无法验证。
需要什么基础?即在进行姿态估计前需要做什么? 主要对传感器数据进行校准、滤波。本文主要从工程角度去实现姿态估计算法。 姿态估计如何做? 根据陀螺仪的角度数据高频特性好,而加速度计和地磁计得到的角度数据低频特性好,从而进行互补,得到最优角度。无论什么算法,本质都是陀螺仪积分得到角度,然后根据加速度计和地磁计修正积分的漂移误差。 工程上每个算法的引入都是为了解决问题的,所以下面将从简单的互补开始,逐步解释每个算法的优缺点。 1、 记录实际飞行数据,需要保存陀螺仪、加速度、地磁计数据; 如图所示:
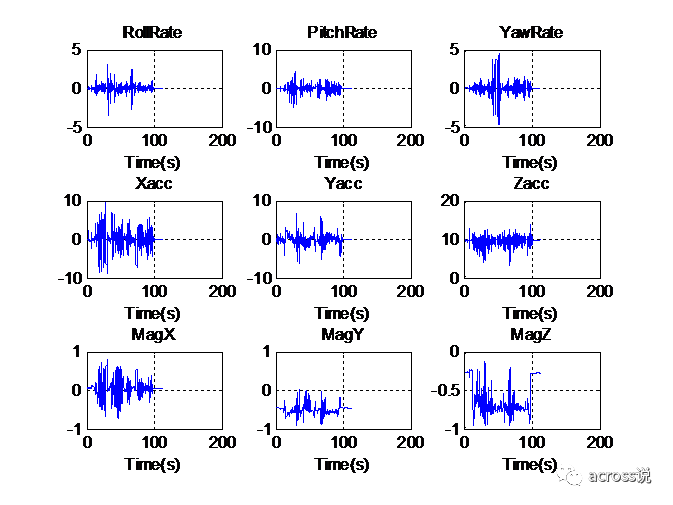
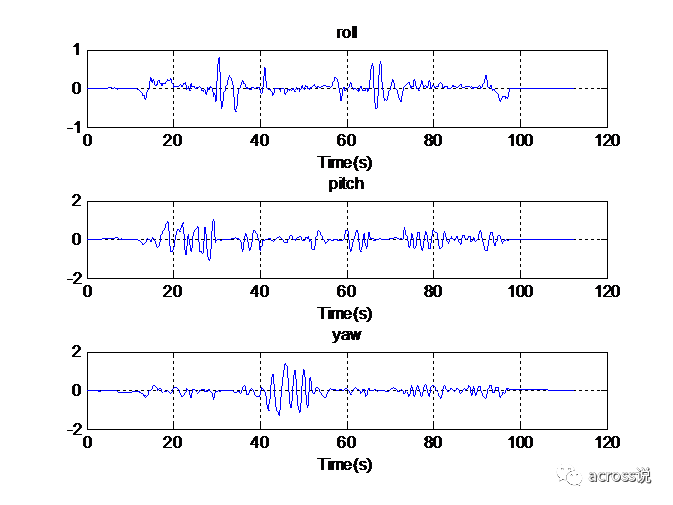
笔者这里采用了现成的模块,所以有参考的角度数据。
2、对好数据坐标系 即调整数据的正负号,初学者往往会忽略这一点,这个在姿态估计算法中非常重要,很多人经常有疑问,为什么自己移植别人的代码,一模一样,但是自己就得不到正确的结果,往往原因都在这里。另外,有时候通过调参会掩盖这类问题,从而导致算法性能不能达到最优。这里笔者以前右下(xyz)为机体系,另外如果飞行数据噪音很大,可以在仿真中做滤波处理。 3、分析单独的陀螺仪积分角度与加速度计计算得到的角度数据 方法: 角速度数据直接积分; 加速度数据:  代码:
代码:
%对比角速度积分与加速度得到的姿态角之间的区别
%角速度积分得到的角度会随时间漂移
%加速度得到的角度会噪声很大
roll_gyro = zeros(m,1);
roll_acc = zeros(m,1);
for i = 2:m
if i==1
roll_gyro(1) = gx(1) * dt;
else
roll_gyro(i) = roll_gyro(i-1) + gx(i) * dt;
end
roll_acc(i) = atan2(ay(i),-az(i));
end
figure(4)
plot(t1,roll_gyro,t1,roll_acc,'r');title('roll 角速度、加速度推角度对比');xlabel('Time(s)');grid;
pitch_gyro = zeros(m,1);
pitch_acc = zeros(m,1);
for i = 2:m
if i==1
pitch_gyro(1) = gy(1) * dt;
else
pitch_gyro(i) = pitch_gyro(i-1) + gy(i) * dt;
end
pitch_acc(i) = atan2(-ax(i),-az(i));
end
figure(5)
plot(t1,pitch_gyro,t1,pitch_acc,'r');title('pitch 角速度、加速度推角度对比');xlabel('Time(s)');grid;
仿真结果:
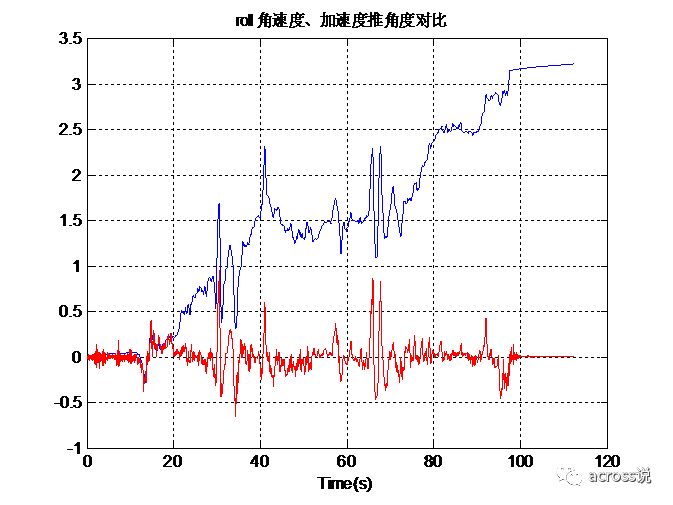
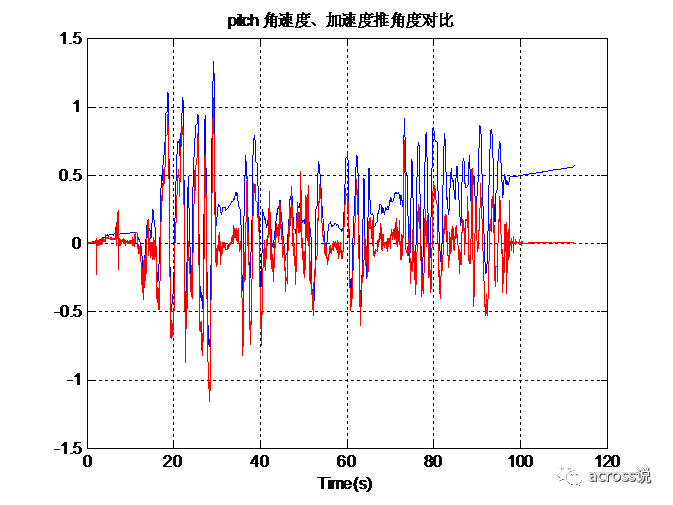
如上图所示,蓝色的陀螺积分角度随着时间会有漂移,而加速度计得到的角度则噪声很大,都无法使用(这里的数据不是飞行数据,所以噪声很小)。所以,既然单独的角度都各自有缺陷,而恰好一个有漂移一个没有漂移,一个噪音大一个噪音小,很自然能联想到用互补的办法,每个周期的最优角度为两者加权得到。 4、线性互补滤波 通过设置一个权重值,让每个周期得到的角度由两个数据源共同作用,还可以通过调节权重值,选择是更相信陀螺仪还是加速度。 代码:
%互补滤波 单轴
complementation_filtered = zeros(m,1);
adaption_complementation_filtered = zeros(m,1);
coeff = 0.75;
for i=2:m
complementation_filtered(i) = (complementation_filtered(i-1) + gx(i)*dt) * coeff + (1 - coeff) * roll_acc(i);
if abs(gx(i)) > 0.2
adaption_complementation_filtered(i) = (adaption_complementation_filtered(i-1) + gx(i)*dt) * coeff + (1 - coeff) * roll_acc(i);
else
adaption_complementation_filtered(i) = (adaption_complementation_filtered(i-1) + gx(i)*dt) * 0.005 + (1 - 0.005) * roll_acc(i);
end
end
figure(6)
subplot(411)
title('滚转');
plot(t1,complementation_filtered,'r',t1,roll_gyro);grid;
legend('互补滤波','角速度积分')
subplot(412)
plot(t1,complementation_filtered,'r',t1,roll_acc);grid;
legend('互补滤波','加速度参考')
subplot(413)
plot(t1,complementation_filtered,'r',t1,roll);grid;
legend('互补滤波','参考角度')
subplot(414)
plot(t1,adaption_complementation_filtered,'r',t1,roll);grid;
legend('自适应互补','参考角度')
仿真结果:
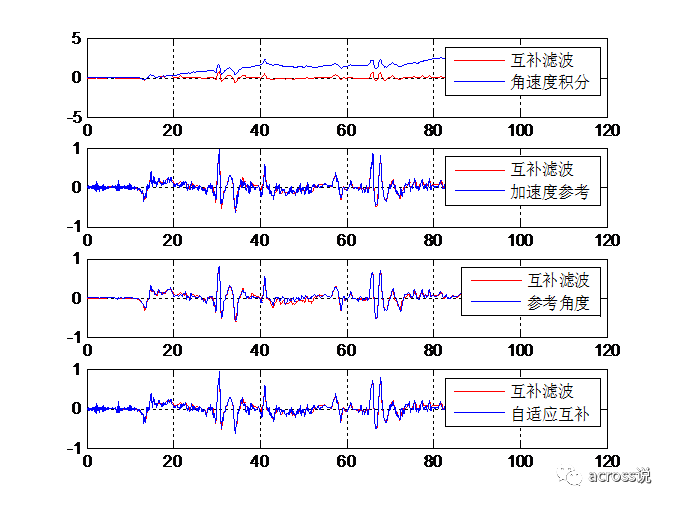
首先我们可以看出互补滤波的结果不再像陀螺仪角度那样,随着时间漂移。实际飞行时,固定的权重值很难找到理想值,要不陀螺仪的权重大了,动态性能还可以,大致能跟上角度,但是不能静态保持;加速度权重大了,噪音大,另外动态性能差,原地来回摆动时,得到的角度幅值会很小,这里的数据很难看出这个问题。 所以最好是当飞行器在动态过程时,我们更相信陀螺仪,反之,飞行器静止时,又更相信加速度计。即参数进行自适应调整。判定角速度数据,大于一定阈值,认为在运动,所以加大陀螺仪权重。 5、卡尔曼滤波 作为状态估计常用的算法,卡尔曼滤波的卡尔曼增益是动态调整的,所以这一点比固定权重的线性互补滤波要好,此外要注意的是卡尔曼的效果好坏与所选用的状态变量,建立的模型有很大关系,不可一概而论卡尔曼就一定很好,具体情况具体分析。 因卡尔曼滤波的使用条件是针对线性模型,且状态分布为高斯分布,所以这里建立两种线性模型,对比仿真结果。 模型一: 状态量为角度和角速度偏移,这里认为角速度偏移为常值,即角度是上一时刻的角度加(减)角速度偏移的角度,再加上角速度积分的增量。  转换成状态空间形式:
转换成状态空间形式:

代码:
%单轴kalman 模型1Q_angle = 0.1;Q_bias = 0.01;R_angle = 10; Q = [Q_angle 0; 0 Q_bias];pitchKF1 = zeros(m,1);pitchMeasure1 = zeros(m,1);bias = zeros(m,1);P = [0 00 0];C = [1 0]; for i = 2:m pitchMeasure1(i) = atan2(-ax(i),-az(i)); A = [1 -dt; 0 1]; %Predicted state estimate x = F.x + B.u pitchKF1(i) = pitchKF1(i-1) + dt * (gy(i) - bias(i-1)); bias(i) = bias(i-1); %Predicted estimate covariance P = F.P.F' + Q P = A*P*A' + Q; %Innovation y = z - H.xy = pitchMeasure1(i) - pitchKF1(i); %Innovation covariance S = H.P.H' + R S = C*P*C' + R_angle; %Optimal kalman gain K = P.H'/S K = P * C' / S; %Updated state estimate x=x + K.y pitchKF1(i) = pitchKF1(i) + K(1)*y; bias(i) = bias(i) + K(2)*y; %Updated estimate covariance P = (I - K.H).P P = ([1 0; 0 1] - [K(1); K(2)] * C) * P;endfigure(7)plot(t1,pitchKF1,t1,pitch,'r');title('单轴卡尔曼模型结果验证');xlabel('Time(s)');grid;legend('单轴卡尔曼','参考角度')
仿真结果:
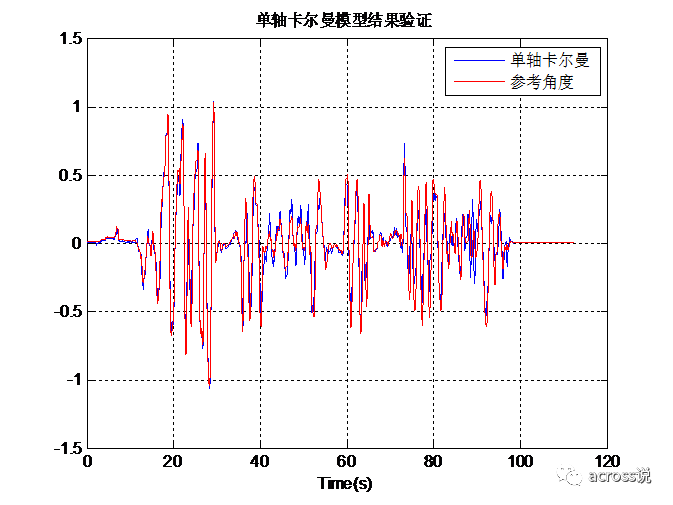
放大图像:
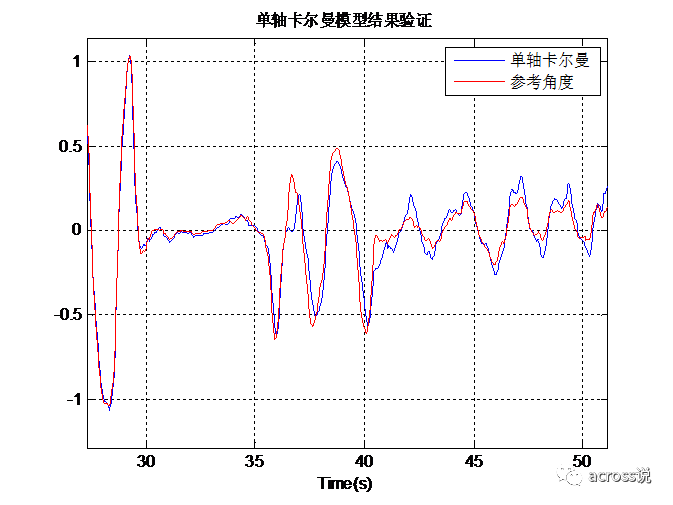
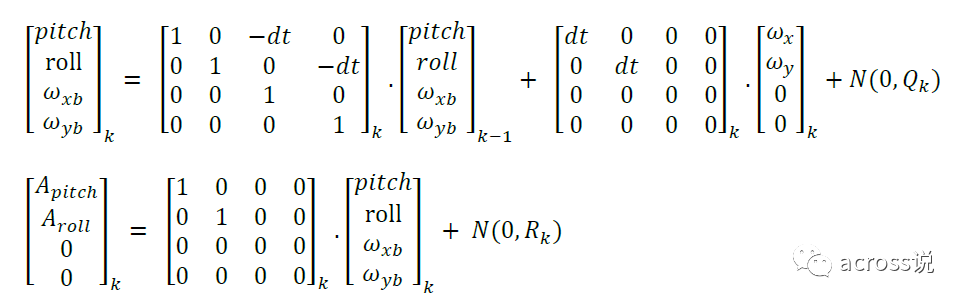
可以看出,此算法基本能得到正确结果,除了在某些地方跟踪不好,具体原因后面再讲。 模型二: 状态量分别是俯仰角、滚转角以及对应的角速度偏移。与上面的模型相比,这里我们将水平方向的两轴姿态合并在一起,这样易于代码实现,否则在软件中需针对三个轴进行三次调用。 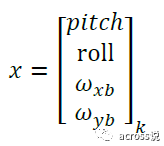 模型如下:
模型如下:
代码:
%两轴kalman 模型2
pitchKF2 = zeros(m,1);
rollKF2 = zeros(m,1);
bp = zeros(m,1);
bq = zeros(m,1);
pitchMeasure2 = zeros(m,1);
rollMeasure2 = zeros(m,1);
P_out = zeros(m,4,4);
Q_pitch = 0.001; %Calculated from data
Q_roll = 0.001; %Calculated from data
Q_bp = 0.1;
Q_bq = 0.1;
R_pitch = 5; %Accel variance, calculated from data
R_roll = 5; %Accel variance, calculated from data
Q = [Q_pitch 0 0 0
0 Q_roll 0 0
0 0 Q_bp 0
0 0 0 Q_bq];
R = [R_pitch 0 0 0
0 R_pitch 0 0
0 0 0 0
0 0 0 0];
P = [0 0 0 0
0 0 0 0
0 0 10000 0
0 0 0 10000];
H = [1 0 0 0
0 1 0 0
0 0 0 0
0 0 0 0];
I = [1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1];
x = [gy(1)
gx(1)
0
0];
for i = 1:m
pitchMeasure2(i) = atan2(-ax(i),-az(i));
rollMeasure2(i) = atan2(ay(i),-az(i));
F = [1 0 -dt 0
0 1 0 -dt
0 0 1 0
0 0 0 1];
B = [dt 0 0 0
0 dt 0 0
0 0 0 0
0 0 0 0];
u = [gy(i)
gx(i)
0
0];
z = [pitchMeasure2(i)
rollMeasure2(i)
0
0];
%Predicted state estimate
x = F*x + B*u;
%Predicted estimate covariance
P = F*P*F' + dt*Q;
%Measurement residual
y = z - H*x;
%Residual covariance
S = H*P*H' + R;
%Optimal Kalman gain
K = P*H'*pinv(S);
%Updated state estimate
x = x + K*y;
%Updated estimate covariance
P = (I - K*H)*P;
pitchKF2(i) = x(1);
rollKF2(i) = x(2);
bp(i) = x(3);
bq(i) = x(4);
P_out(i,1:4,1:4) = P(1:4,1:4);
end
figure(8)
subplot(211)
plot(t1,rollKF2,t1,roll,'r');title('roll 角度对比');xlabel('Time(s)');grid;
legend('两轴卡尔曼','参考角度')
subplot(212)
plot(t1,pitchKF2,t1,pitch,'r');title('pitch 角度对比');xlabel('Time(s)');grid;
legend('两轴卡尔曼','参考角度')
仿真结果:
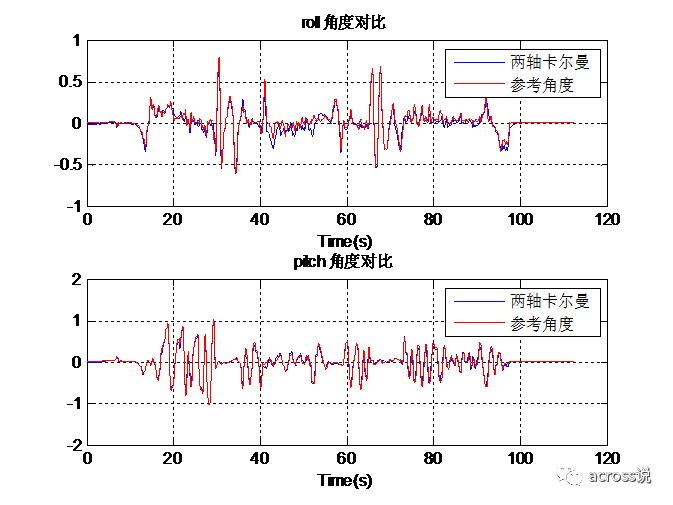
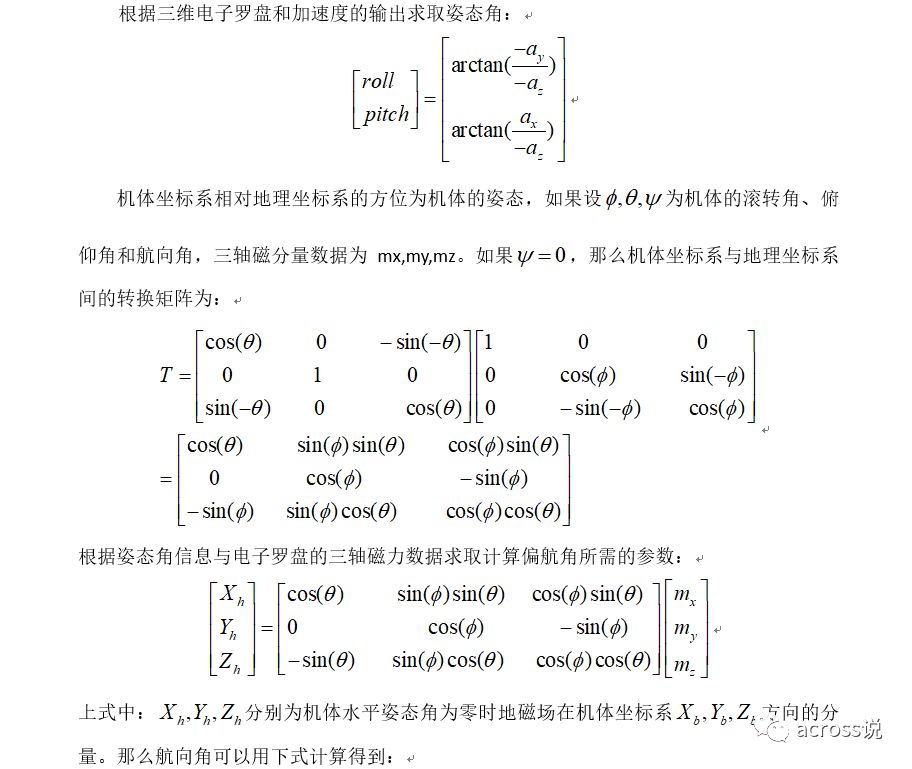
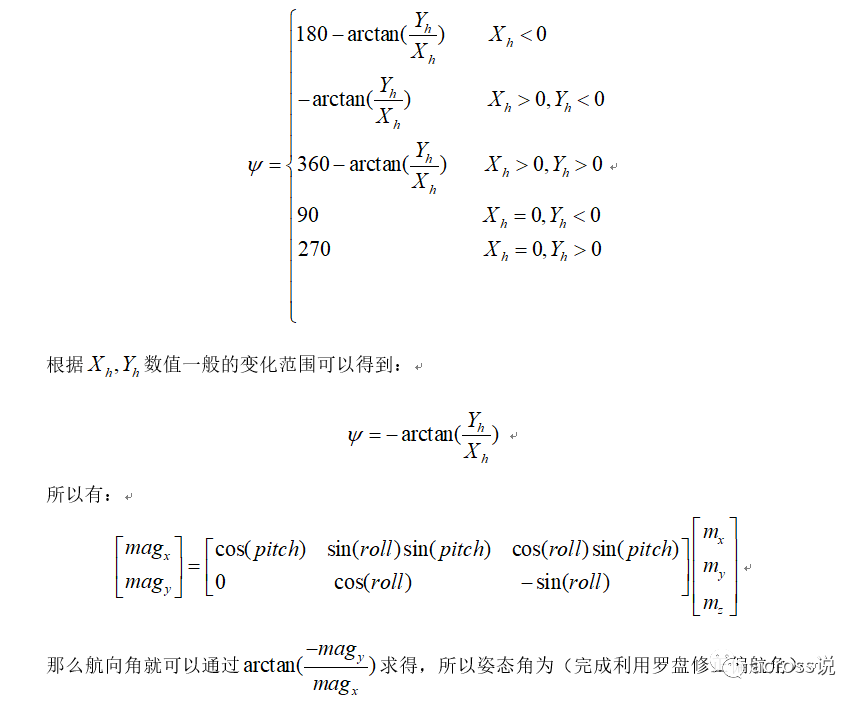
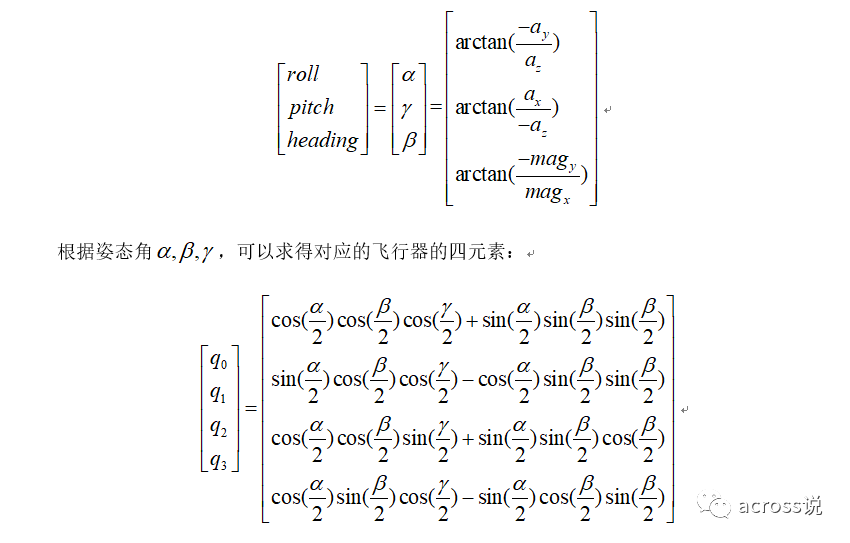
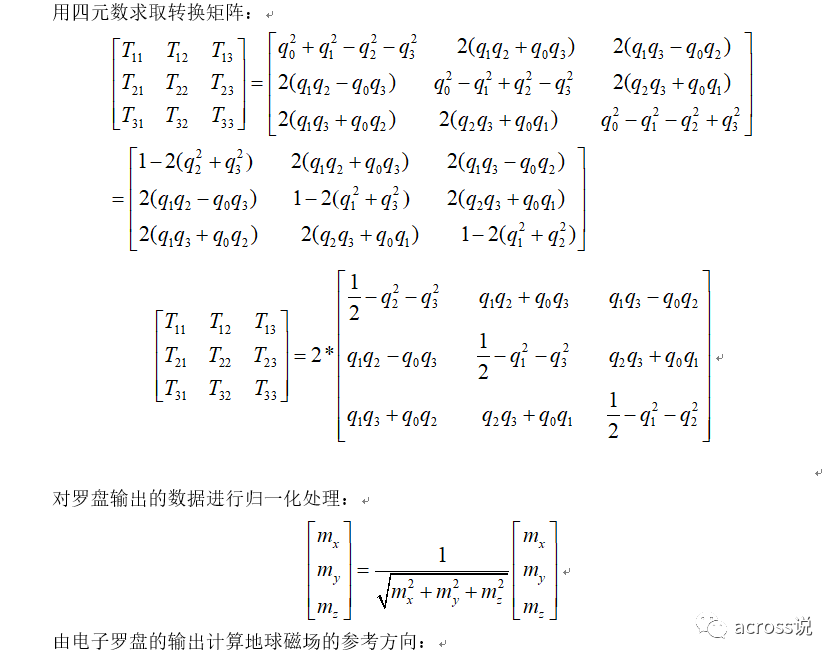
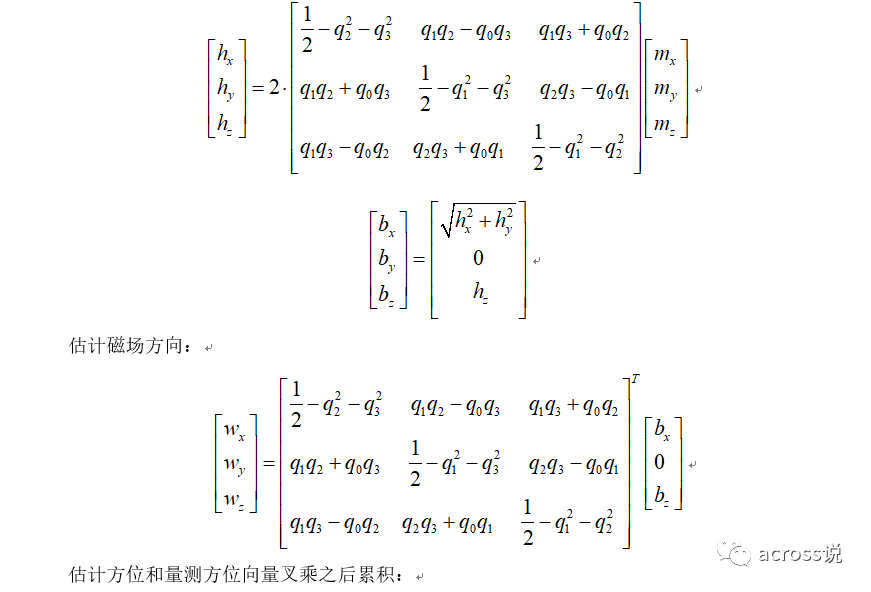
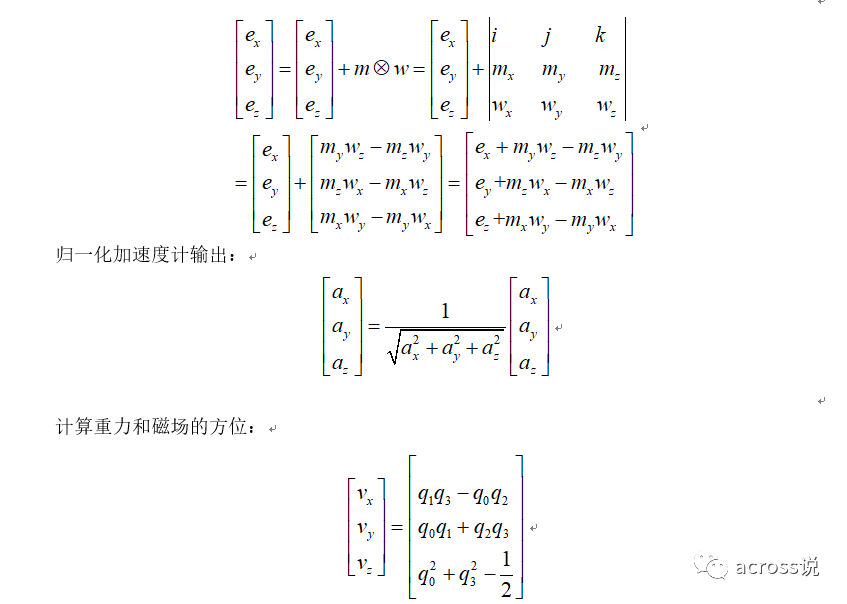
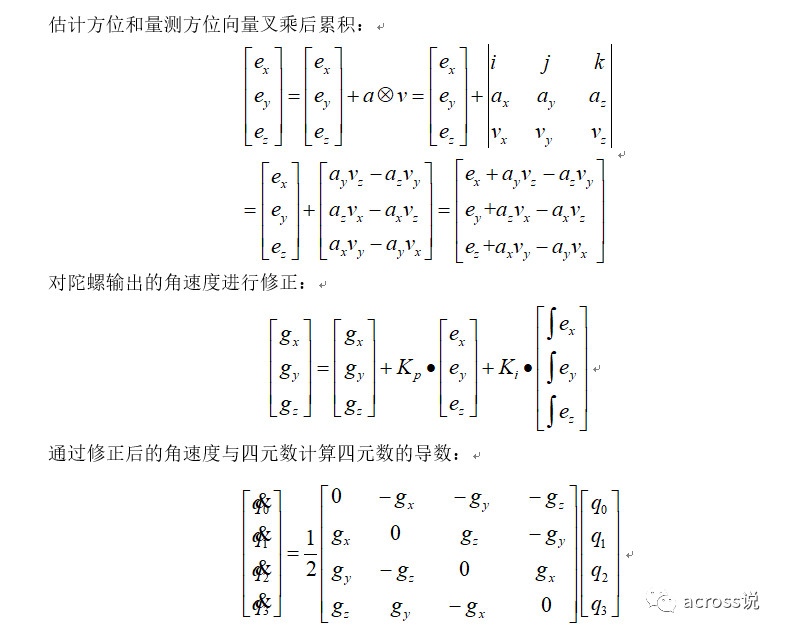
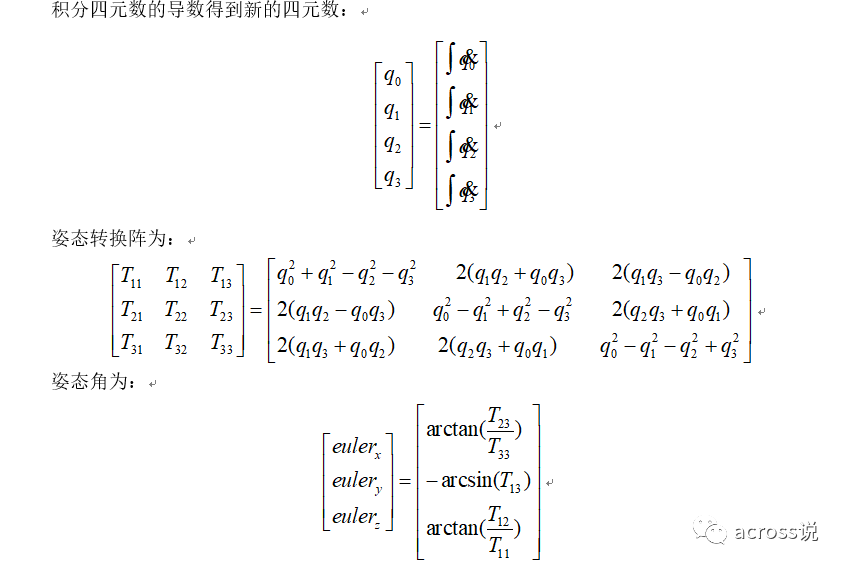
目前为止,我们介绍的都是线性模型的姿态估计。以卡尔曼为例,这两种算法基本能满足使用要求,但存在不足。由于线性模型的关系,在只有一个轴向运动的时候,效果还不错,所以如果一个运动同时包含了两个轴,这时候得到的结果就不准确了,上述的一些跟踪不好的地方就是因为此时yaw有运动,所以计算的结果受到了影响。 所以,实际飞行器的运动为非线性模型,我们也要考虑非线性模型的姿态估计。 6、mahony算法 实际在飞控应用时,以上所描述的线性互补很难满足使用要求,因此要求更佳的算法。常见的有mahony,属于非线性互补滤波。算法原理:根据加速度计和地磁计的数据,转换到地理坐标系后,与对应参考的重力向量和地磁向量进行求误差,这个误差用来校正陀螺仪的输出,然后用陀螺仪数据进行四元数更新,再转换到欧拉角。 具体步骤如下:
代码:
%mahonyhalfT = 0.5 * dt;Kp = 0.25;Ki = 0.0;exInt = zeros(m,1); eyInt = zeros(m,1);ezInt = zeros(m,1); q0 = zeros(m,1);q1 = zeros(m,1);q2 = zeros(m,1);q3 = zeros(m,1);q0q0 = zeros(m,1);q0q1 = zeros(m,1);q0q2 = zeros(m,1);q0q3 = zeros(m,1);q1q1 = zeros(m,1);q1q2 = zeros(m,1);q1q3 = zeros(m,1);q2q2 = zeros(m,1);q2q3 = zeros(m,1);q3q3 = zeros(m,1);q0(1) = 1;rollmahony = zeros(m,1);pitchmahony = zeros(m,1);yawmahony = zeros(m,1);az = -az;for i=2:m q0q0(i)=q0(i-1)*q0(i-1); q0q1(i)=q0(i-1)*q1(i-1); q0q2(i)=q0(i-1)*q2(i-1); q0q3(i)=q0(i-1)*q3(i-1); q1q1(i)=q1(i-1)*q1(i-1); q1q2(i)=q1(i-1)*q2(i-1); q1q3(i)=q1(i-1)*q3(i-1); q2q2(i)=q2(i-1)*q2(i-1); q2q3(i)=q2(i-1)*q3(i-1); q3q3(i)=q3(i-1)*q3(i-1); norm = sqrt(mx(i)*mx(i)+my(i)*my(i)+mz(i)*mz(i)); mx(i)=mx(i)/norm; my(i)=my(i)/norm; mz(i)=mz(i)/norm; hx = 2.0 * (mx(i) * (0.5 - q2q2(i) - q3q3(i)) + my(i) * (q1q2(i) - q0q3(i)) + mz(i) * (q1q3(i) + q0q2(i))); hy = 2.0 * (mx(i) * (q1q2(i) + q0q3(i)) + my(i) * (0.5 - q1q1(i) - q3q3(i)) + mz(i) * (q2q3(i) - q0q1(i))); bx = sqrt(hx * hx + hy * hy); ez_ef = -hy * bx; mag_ex = 2.0 * (q1q3(i) - q0q2(i)) * ez_ef; mag_ey = 2.0 * (q2q3(i) + q0q1(i)) * ez_ef; mag_ez = (1.0 - 2.0 * q1q1(i) - 2.0 * q2q2(i)) * ez_ef; norm=sqrt(ax(i)*ax(i)+ay(i)*ay(i)+az(i)*az(i));%把加计的三维向量转成单位向量 ax(i)=ax(i)/norm; ay(i)=ay(i)/norm; az(i)=az(i)/norm; halfex = (ay(i)*(1.0 - 2.0*q1q1(i) - 2.0*q2q2(i)) - az(i)*(2.0*(q2q3(i)+q0q1(i)))); halfey = (az(i)*(2.0*(q1q3(i)-q0q2(i))) - ax(i)*(1.0 - 2.0*q1q1(i) - 2.0*q2q2(i))); halfez = (ax(i)*(2.0*(q2q3(i)+q0q1(i))) - ay(i)*(2.0*(q1q3(i)-q0q2(i)))); ex = halfex;% + mag_ex; ey = halfey;% + mag_ey; ez = halfez;% + mag_ez; exInt(i) = exInt(i) + ex* Ki* dt; eyInt(i) = eyInt(i) + ey* Ki* dt; ezInt(i) = ezInt(i) + ez* Ki* dt; gx(i) = (gx(i) + Kp*ex + exInt(i))*halfT; gy(i) = (gy(i) + Kp*ey + eyInt(i))*halfT; gz(i) = (gz(i) + Kp*ez + ezInt(i))*halfT; q0(i) = q0(i-1) + (-q1(i-1)*gx(i) - q2(i-1)*gy(i) - q3(i-1)*gz(i));%四元数微分方程 q1(i) = q1(i-1) + ( q0(i-1)*gx(i) + q2(i-1)*gz(i) - q3(i-1)*gy(i)); q2(i) = q2(i-1) + ( q0(i-1)*gy(i) - q1(i-1)*gz(i) + q3(i-1)*gx(i)); q3(i) = q3(i-1) + ( q0(i-1)*gz(i) + q1(i-1)*gy(i) - q2(i-1)*gx(i)); norm = sqrt(q0(i)*q0(i) + q1(i)*q1(i) + q2(i)*q2(i) + q3(i)*q3(i));%四元数规范化 q0(i) = q0(i) / norm; q1(i) = q1(i) / norm; q2(i) = q2(i) / norm; q3(i) = q3(i) / norm; rollmahony(i) = atan2(2 * q2(i) * q3(i) + 2 * q0(i) * q1(i), -2 * q1(i) * q1(i) - 2 *q2(i)* q2(i) + 1); %roll pitchmahony(i) = (asin(2 * q0(i) * q2(i) - 2 * q1(i)* q3(i))); % pitch yawmahony(i) = atan2(2 * q1(i) * q2(i) + 2 * q0(i) * q3(i) , -2 *q2(i) * q2(i) - 2 * q3(i) * q3(i) +1);endfigure(9)subplot(311)plot(t1,rollmahony,t1,roll,'r');title('roll 角度对比');xlabel('Time(s)');grid;legend('mahony','参考角度')subplot(312)plot(t1,pitchmahony,t1,pitch,'r');title('pitch 角度对比');xlabel('Time(s)');grid;legend('mahony','参考角度')subplot(313)plot(t1,yawmahony,t1,yaw,'r');title('yaw 角度对比');xlabel('Time(s)');grid;legend('mahony','参考角度')
仿真结果:
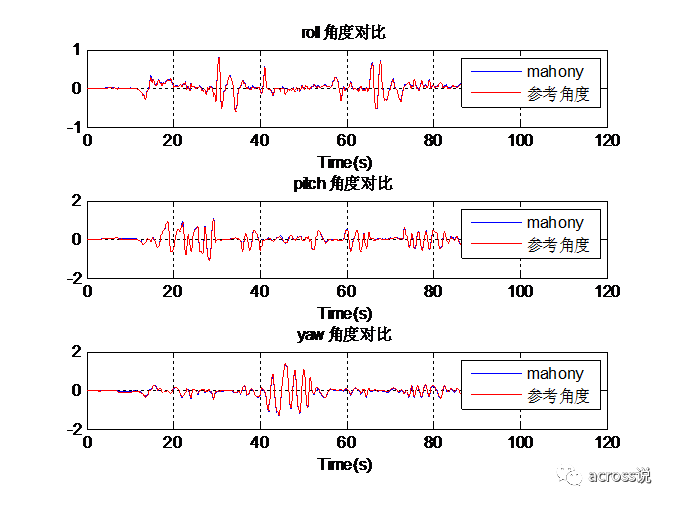
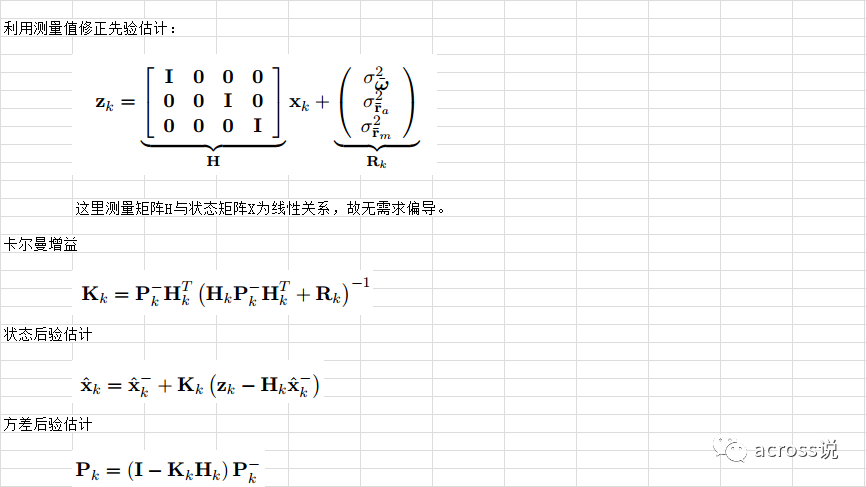
图中可以看出,算法结果基本能跟踪参考角度,性能较好。实际工程中,我们也常常使用mahony算法进行姿态估计。 7、扩展卡尔曼滤波 由于是非线性模型,所以在卡尔曼的基础上,我们进行改进,采用扩展卡尔曼滤波算法。 模型一: PX4飞控早期的attitude_estimator_ekf版本。
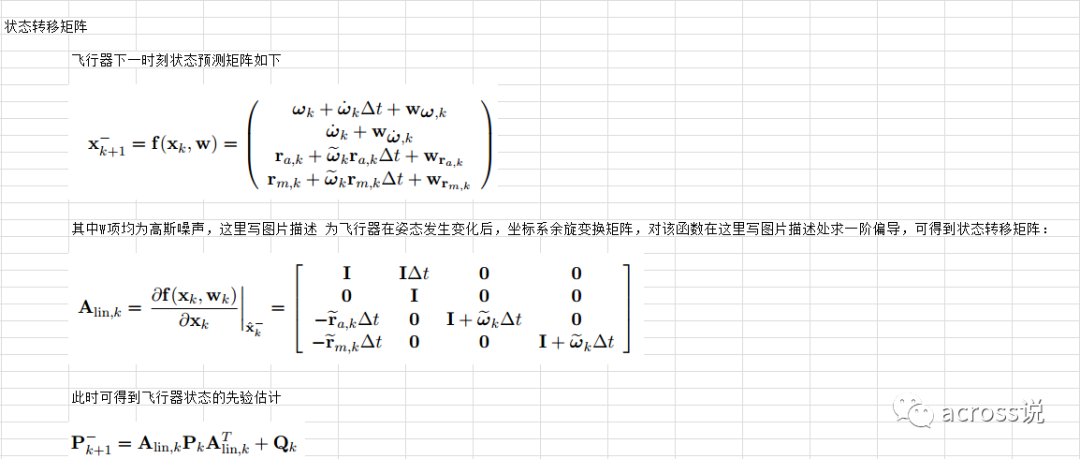
此为开源代码,读者可自行进行移植测试。 模型二: 参考书目 Nonami K, Kendoul F, Suzuki S, et al.Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro AerialVehicles[M]. Springer Publishing Company, Incorporated, 2010. 第10章
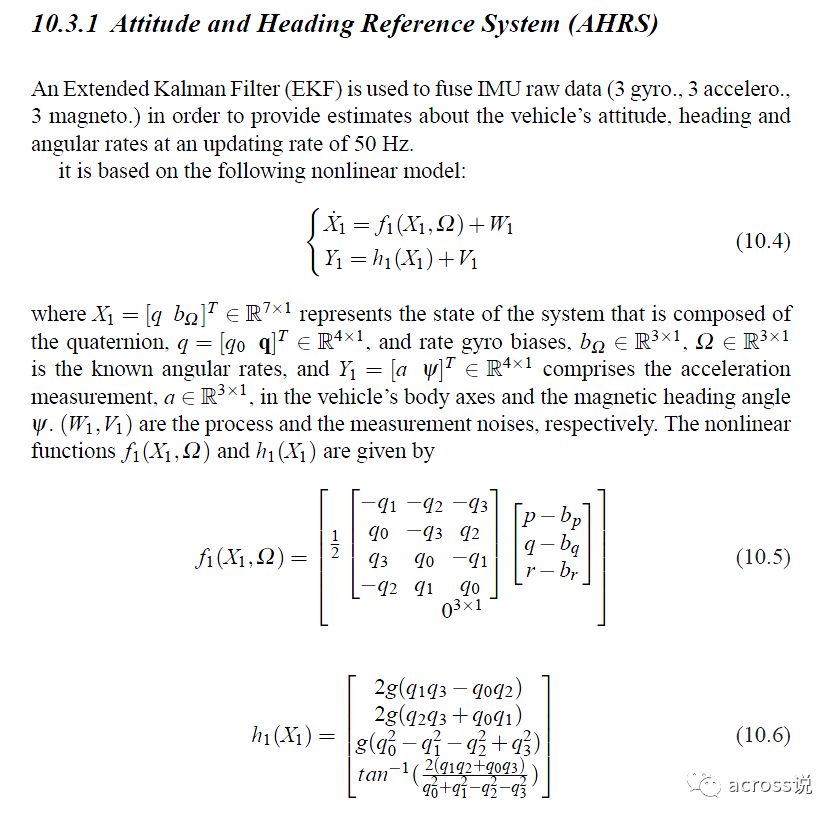
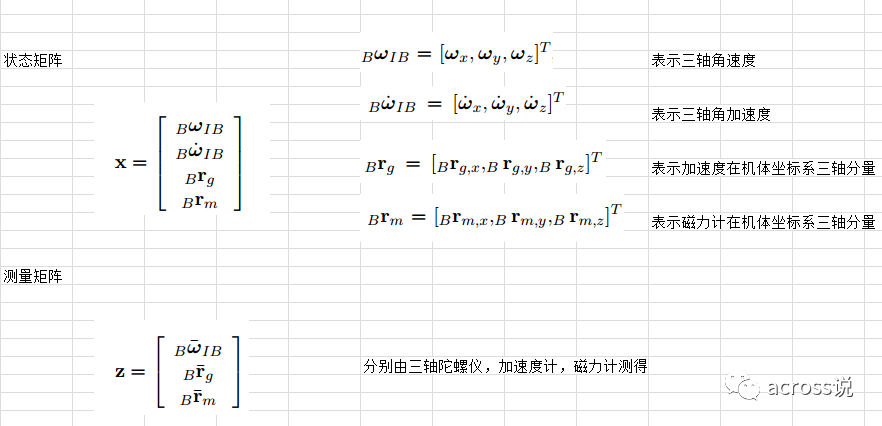
这里笔者进行了修改,将7状态量缩减成4状态量,只更新四元数。 代码:
p=rollrate;q=pitchrate;r=yawrate;%ACC的测量噪声var_ax=5;var_ay=5;var_az=5;%mag的测量噪声var_mx=50;var_my=50;var_mz=50;%状态变量的过程噪声P1=[1,1,1,1];P=diag(P1);x_e=[1;0;0;0];Pitch = zeros(m,1);Roll = zeros(m,1);Yaw = zeros(m,1); %状态转移矩阵F = eye(4,4);%卡尔曼增益矩阵K = zeros(4,3);%观测矩阵H = zeros(3,4);Hdt=0.5*dt;Q1 = 0.00001;%Q矩阵中的数也是经验值得到,需要在考虑q中的参数Q2 = 0.01;R=zeros(6,6);R(1,1)=var_ax;R(2,2)=var_ay;R(3,3)=var_az;R(4,4)=var_mx;R(5,5)=var_my;R(6,6)=var_mz;% R=zeros(3,3);% R(1,1)=var_ax;% R(2,2)=var_ay;% R(3,3)=var_az;for i=1:m norm = 1.0/sqrt(x_e(1,1)*x_e(1,1)+x_e(2,1)*x_e(2,1)+x_e(3,1)*x_e(3,1)+x_e(4,1)*x_e(4,1));for n=1:4 x_e(n,1)=x_e(n,1)*norm; end %状态转移矩阵 F = [ 1, -Hdt*(p(i)), -Hdt*(q(i)), -Hdt*(r(i)); Hdt*(p(i)), 1, Hdt*(r(i)), -Hdt*(q(i)); Hdt*(q(i)), -Hdt*(r(i)), 1, Hdt*(p(i)); Hdt*(r(i)), Hdt*(q(i)), -Hdt*(p(i)), 1;]; dTemp(1)=x_e(1,1)-Hdt*(p(i))*x_e(2,1)-Hdt*(q(i))*x_e(3,1)-Hdt*(r(i))*x_e(4,1); dTemp(2)=x_e(2,1)+Hdt*(p(i))*x_e(1,1)-Hdt*(q(i))*x_e(4,1)+Hdt*(r(i))*x_e(3,1); dTemp(3)=x_e(3,1)+Hdt*(p(i))*x_e(4,1)+Hdt*(q(i))*x_e(1,1)-Hdt*(r(i))*x_e(2,1); dTemp(4)=x_e(4,1)-Hdt*(p(i))*x_e(3,1)+Hdt*(q(i))*x_e(2,1)+Hdt*(r(i))*x_e(1,1);for j=1:4 x_e(j,1)=dTemp(j); end %协方差一步预测更新 P=F*P*F'; %加入噪音项 P(1,1)=P(1,1)+Q1; P(2,2)=P(2,2)+Q1; P(3,3)=P(3,3)+Q1; P(4,4)=P(4,4)+Q1; y(1,1)= -2.0*(x_e(2,1)*x_e(4,1)-x_e(1,1)*x_e(3,1)); y(2,1)= -2.0*(x_e(1,1)*x_e(2,1)+x_e(3,1)*x_e(4,1)); y(3,1)= -(x_e(1,1)*x_e(1,1)-x_e(2,1)*x_e(2,1)-x_e(3,1)*x_e(3,1)+x_e(4,1)*x_e(4,1)); %测量的Acc数据 norm=sqrt(ax(i)*ax(i)+ay(i)*ay(i)+az(i)*az(i));%把加计的三维向量转成单位向量 ax(i)=ax(i)/norm; ay(i)=ay(i)/norm; az(i)=az(i)/norm; y_s(1,1) = -ax(i); y_s(2,1) = -ay(i); y_s(3,1) = az(i); norm = sqrt(mx(i)*mx(i)+my(i)*my(i)+mz(i)*mz(i)); mx(i)=mx(i)/norm; my(i)=my(i)/norm; mz(i)=mz(i)/norm; y_s(4,1) = mx(i); y_s(5,1) = my(i); y_s(6,1) = mz(i); hx = 2.0 * (mx(i) * (0.5 - x_e(3,1)*x_e(3,1) - x_e(4,1)*x_e(4,1)) + my(i) * (x_e(2,1)*x_e(3,1) - x_e(1,1)*x_e(4,1)) + mz(i) * (x_e(2,1)*x_e(4,1) + x_e(1,1)*x_e(3,1))); hy = 2.0 * (mx(i) * (x_e(2,1)*x_e(3,1) + x_e(1,1)*x_e(4,1)) + my(i) * (0.5 - x_e(2,1)*x_e(2,1) - x_e(4,1)*x_e(4,1)) + mz(i) * (x_e(3,1)*x_e(4,1) - x_e(1,1)*x_e(2,1))); bx = sqrt(hx * hx + hy * hy); bz = 2.0 * (mx(i) * (x_e(2,1)*x_e(4,1) - x_e(1,1)*x_e(3,1)) + my(i) * (x_e(3,1)*x_e(4,1) + x_e(1,1)*x_e(2,1)) + mz(i) * (0.5 - x_e(2,1)*x_e(2,1) - x_e(3,1)*x_e(3,1))); y(4,1)=bx*(x_e(1,1)*x_e(1,1) + x_e(2,1)*x_e(2,1) - x_e(3,1)*x_e(3,1) - x_e(4,1)*x_e(4,1)) + 2*bz*(x_e(2,1)*x_e(4,1) - x_e(1,1)*x_e(3,1)); y(5,1)=2*bx*(x_e(2,1)*x_e(3,1) - x_e(1,1)*x_e(4,1)) + 2*bz*(x_e(3,1)*x_e(4,1) + x_e(1,1)*x_e(2,1)); y(6,1)=2*bx*(x_e(2,1)*x_e(4,1) + x_e(1,1)*x_e(3,1)) + bz*(x_e(1,1)*x_e(1,1) - x_e(2,1)*x_e(2,1) - x_e(3,1)*x_e(3,1) + x_e(4,1)*x_e(4,1)); %观测矩阵更新% H = [ 2.0*x_e(3,1), -2.0*x_e(4,1), 2.0*x_e(1,1), -2.0*x_e(2,1);% -2.0*x_e(2,1), -2.0*x_e(1,1), -2.0*x_e(4,1), -2.0*x_e(3,1);% -2.0*x_e(1,1), 2.0*x_e(2,1), 2.0*x_e(3,1), -2.0*x_e(4,1);]; H = [ 2*x_e(3,1), -2*x_e(4,1), 2*x_e(1,1), -2*x_e(2,1); -2*x_e(2,1), -2*x_e(1,1), -2*x_e(4,1), -2*x_e(3,1); -2*x_e(1,1), 2*x_e(2,1), 2*x_e(3,1), -2*x_e(4,1); 2*( x_e(1,1)*bx - x_e(3,1)*bz), 2*( x_e(2,1)*bx + x_e(4,1)*bz), 2*(-x_e(3,1)*bx - x_e(1,1)*bz), 2*(-x_e(4,1)*bx + x_e(2,1)*bz); 2*(-x_e(4,1)*bx + x_e(2,1)*bz), 2*( x_e(3,1)*bx + x_e(1,1)*bz), 2*( x_e(2,1)*bx + x_e(4,1)*bz), 2*(-x_e(1,1)*bx + x_e(3,1)*bz); 2*( x_e(3,1)*bx + x_e(1,1)*bz), 2*( x_e(4,1)*bx - x_e(2,1)*bz), 2*( x_e(1,1)*bx - x_e(3,1)*bz), 2*( x_e(2,1)*bx + x_e(4,1)*bz)]; %计算卡尔曼增益 K=P*H'*pinv(H*P*H'+R); %状态估计 x_e=x_e+K*(y_s-y); %x_e=x_e; P=P-K*H*P; norm = 1.0/sqrt(x_e(1,1)*x_e(1,1)+x_e(2,1)*x_e(2,1)+x_e(3,1)*x_e(3,1)+x_e(4,1)*x_e(4,1)); for n=1:4 x_e(n,1)=x_e(n,1)*norm; end %四元数转欧拉角 Pitch(i) = asin(2*(x_e(1,1)*x_e(3,1)- x_e(2,1)*x_e(4,1))); Roll(i) = atan2(2*(x_e(1,1)*x_e(2,1)+x_e(3,1)*x_e(4,1)),1-2*(x_e(2,1)*x_e(2,1)+x_e(3,1)*x_e(3,1))); Yaw(i) = atan2(2*(x_e(2,1)*x_e(3,1)+x_e(1,1)*x_e(4,1)),1-2*(x_e(3,1)*x_e(3,1)+x_e(4,1)*x_e(4,1)));end figure(11)subplot(311)plot(t1,Roll,t1,roll,'r');title('roll 角度对比');xlabel('Time(s)');grid;legend('EKF','参考角度')subplot(312)plot(t1,Pitch,t1,pitch ,'r');title('pitch 角度对比');xlabel('Time(s)');grid;legend('EKF','参考角度')subplot(313)plot(t1,Yaw,t1,yaw,'r');title('yaw 角度对比');xlabel('Time(s)');grid;legend('EKF','参考角度')
仿真结果:
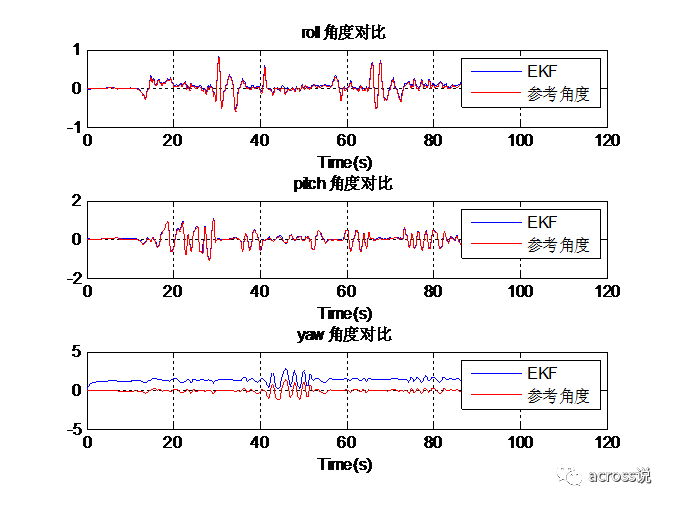
Yaw部分是因为参考角度去掉了偏移,只有相对角度,所以实际是正确的跟踪。上图表明,EKF能达到较好的效果,满足使用要求。 至此,我们已经总结了在姿态估计中常用的几种算法,每个算法的不足与优点也大概介绍了。实际在应用时,并不一定是理论越复杂就一定好用,比如EKF,如果模型维数过多,则计算量大大增加,且增加了算法发散的风险,所以工程应用,只选用满足要求的最佳算法。
总结一下: 1、 坐标系对应是姿态估计非常重要的一环,特别是移植; 2、 如何调参?工程上进行算法开发时,笔者建议的流程是先分析问题,选用相应的算法,并进行设计,取飞行数据,然后在matlab仿真环境下进行仿真调试,最后转换成嵌入式代码实现功能。这样做的好处是,如果在嵌入式环境下进行大量的调参时,非常繁琐,不方便以及不直观。当然,现在有基于模型的开发方式,这里不做过多叙述。具体如何调参,可参见视频教程; 3、 工程应用时,要考虑震动对数据以及算法的影响,动加速度对重力参考的影响,外界地磁干扰对地磁参考的影响,如何在算法中避免这些情况,或者说出现这些情况下如何保证算法不崩溃,即鲁棒性; 4、 没有绝对的最好的算法。
编辑:黄飞
-
基于空子载波的信噪比估计算法2010-04-23 0
-
姿态融合算法是什么2019-07-19 0
-
基于无迹卡尔曼滤波的四旋翼无人飞行器姿态估计算法_朱岩2020-06-04 0
-
基于PN序列的频偏估计算法2009-08-19 1042
-
多普勒中心频率实时估计算法2011-06-28 924
-
基于FFT的高精度频率估计算法2012-02-08 578
-
一种改进的循环谱估计算法2017-01-07 784
-
互耦效应下多组相干源的波达方位估计算法_陈辉2017-01-08 555
-
一种改进扩展卡尔曼的四旋翼姿态估计算法2017-12-04 995
-
基于四元数和扩展卡尔曼滤波器的姿态解算与外力加速度同步估计算法2017-12-19 710
-
基于相位补偿的FDOA估计算法2018-02-28 664
-
腾讯优图实验室在人体2D姿态估计中获得了创新技术突破2020-10-26 2415
-
基于深度学习的二维人体姿态估计方法2021-03-22 723
-
基于深度学习的二维人体姿态估计算法2021-04-27 623
-
信道估计算法2022-12-12 1291
全部0条评论

快来发表一下你的评论吧 !
