

工业机器人精密减速器传动效率试验
描述
精密减速器是工业机器人的核心部件,占工业机器人本体成本的30%以上,是影响工业机器人精确性、稳定性等性能指标的重要元件。按照传动原理划分,主流的精密减速器有行星摆线减速器和谐波减速器两类,具有小体积、轻质量、高精度等特点。近年来,随着汽车等智能制造产业的发展,工业机器人的需求量剧增,市场广泛发展。
减速器作为机器人关键的零部件之一,进行各项关键指标参数测试,也是必不可少的生产环节。但是目前减速器的国产化率不足,国内工业机器人减速器约70%的份额被外资企业垄断,制约着机器人的国产市场发展。传动效率作为减速器的重要性能指标之一,影响着减速器的工作精度和可靠性。
因此,本文通过对国内外减速器进行传动效率测试,分析总结试验数据,为减速器国产化及实际应用发展提供参考价值。
01 Number 减速器工作原理及传动效率
--工作原理:
行星摆线减速器工作原理: 行星摆线减速器是由渐开线行星齿轮减速机构和摆线针轮减速机构组成的精密传动装置,如图 1 所示。
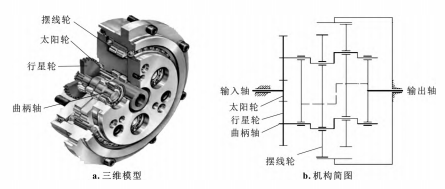
图1 行星摆线减速器结构
第一级减速的实现,是由主动的太阳轮与输入轴相连,带动3个呈 120°布置的行星轮在绕太阳轮轴心公转同时反方向自转,使曲柄轴同速转动。第二级减速则是通过曲柄轴带动摆线轮做偏心运动来实现。摆线轮在固定的针齿的啮合作用下,在其轴线绕针轮轴线公转的同时,还会产生反方向自转,从而将运动传到输出轴。
谐波减速器工作原理: 谐波减速器主要由波发生器、柔轮和刚轮3个基本部件组成,其结构如图2所示。波发生器一般安装在减速器的输入端,由柔性轴承与椭圆形凸轮组成。柔性轴承内圈固定在凸轮上,外圈通过滚珠形成弹性变形。柔轮是带有外齿圈的可产生较大弹性变形的薄壁齿轮,一般安装在减速器的输出端。而刚轮是带有内齿圈的刚性圆环形零件,一般固定在减速器机体上。作为减速器使用,通常是采用波发生器主动、刚轮固定、柔轮输出的形式; 同时亦可将柔轮固定、刚轮输出来得到不同的传动比。
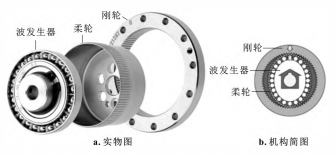
图 2 谐波减速器结构
当波发生器装入柔轮后,迫使柔轮产生弹性变形而呈椭圆状,然后长轴两端附近的齿与刚轮的齿完全啮合;而短轴两端附近的齿则与刚轮的齿完全不接触,处于脱开状态; 周长上其他区段的齿处于逐渐啮入或啮出的过渡状态。当波发生器连续转动时,柔轮不断地产 生可控弹性变形,使柔轮与刚轮的轮齿在进行啮入、啮合、啮出、脱开的过程中不断改变各自的工作状态,从 而实现柔轮相对刚轮沿波发生器相反方向的旋转,传递运动和动力。
传动效率:机械传动的效率是衡量传动质量好坏的重要指标,传动效率越高,传动的质量越好,机械动力传输的性能越好。虽然两类精密减速器的传动方式略有不同,但减速器传动效率的定义是指输出轴实际输出功率与理论输出功率的比值,因此两者测量的方法一致。传动效率的计算公式为:

式中:T1为减速器的输入轴扭矩; T2为减速器的输出轴扭矩;i 为减速器的传动比。通过计算公式可以推导出,试验减速器的传动比是固定的,所以在进行传动效率试验中,只需要让减速器在指定的工况下,通过扭矩传感器测量并记录输入和输出端扭矩,就可以计算出传动效率。
02 Number 试验研究与分析
试验系统原理: 试验系统工作原理如图3所示。将待检测的减速器通过连接工装安装到试验平台上,使减速器的输入轴连接试验台的驱动电机,输出端连接试验台的加载装置, 同时在减速器的输入和输出端配置扭矩传感器,实时采集扭矩数值。测试系统连接传感器的信号线,通过串行通信在工控计算机显示工况运行时的输入输出扭矩,最后计算出传动效率。在进行传动效率试验前,需要将扭矩传感器进行调零,以免残余的扭矩影响测试结果。
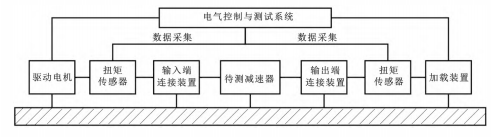
图3 试验系统工作原理
试验过程与结果:
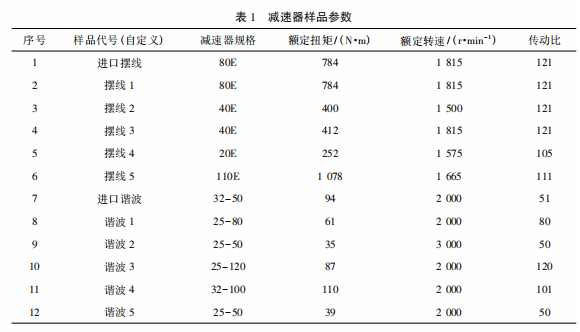
试验样品参数: 选择国产知名品牌的行星摆线减速器和谐波减速器各5款进行传动效率试验,同时选取具有行业代表性的进口品牌产品 ( 行星摆线减速器、谐波减速器各 1 款) 参与比较试验,来对比国内外产品的性能水平。减速器样品参数见表 1。
试验结果: 在传动效率试验中,起动电机,保证减速器在额定转速下运行,加载装置逐渐增大负载,给减速器加载 25%、50%、75%、100%的额定扭矩值,记录每一个测 试点的输入端与输出端扭矩,通过传动效率的公式分析计算,得出传动效率值,并根据数据绘制负载效率曲线,如图 4 和图 5 所示。
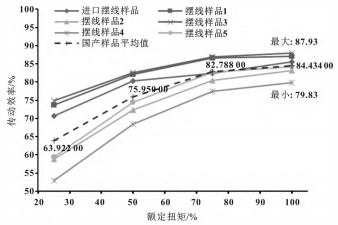
图4 行星摆线减速器负载效率曲线
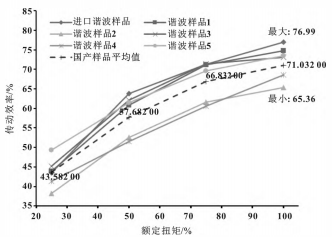
图5 谐波减速器负载效率曲线
由负载效率曲线可看出,减速器在恒定输出转速的工况下,随着输出扭矩的增大,传动效率呈上升趋势。当减速器在小于50%额定输出扭矩的工况下,传动效率随扭矩的增加有较快的爬升速度,而大于50%额定扭矩后的工况下,传动效率变化逐渐平缓; 当达到 100% 额定输出扭矩时,传动效率增长到最高值。依据国家标准 GB / T37718—2019《机器人用精密行星摆线减速器》和 GB / T 30819—2014《机器人用谐波齿轮减速器》的要求,试验的减速器在100%额定扭矩条件下,传动效率应不小于80%。
由图4可知,参与试验的国产行星摆线减速器传动效率差异不大,只有摆线样品4没有达到国家标准要求。其中额定扭矩工况时的传动效率最高达到87.93%,最低79.83%,平均值84.43%。个别样品传动效率比较突出,如摆线样品1和摆线样品3,超过85%,优于进口品牌。其中摆线样品1的参数与进口品牌完全一致,传动质量水平已经超过进口品牌。
总的来说,5款样品的行星摆线减速器传动效率平均值曲线,与进口的样品的传动效率曲线较为接近,可见在传动效率方面,国产品牌的行星摆线减速器与进口品牌减速器差距不大。由图5可知,参与试验的国产谐波减速器的传动效率均不高,其中额定扭矩下最高传动效率只有75.07%, 最低只有65.36%,平均值71.03%,没有达到80%的标准要求。虽然进口品牌的传动效率也没有满足标准要求,但是比国产减速器的传动效率都高,可见谐波减速器国产化仍有一定差距。
另外与行星摆线减速器的传动效率相比,谐波减速器传动效率较低,因而行星摆线减速器的传动平稳,应用更为广泛。选取国产同规格不同厂家的行星摆线减速器和谐波减速器的传动效率进行比较,如图6所示。行星摆线减速器在低扭矩的工况下,传动效率相差超过15%,随着扭矩的增大,传动效率的差值才逐渐减少,但也有接近5%的差距。而谐波减速器在整个试验过程中,传动效率一直保持有10%左右的差距。由此可知,国内各减速器企业的发展差异较大,减速器产品质量参差不齐,在传动性能的综合一致性方面仍需加强。
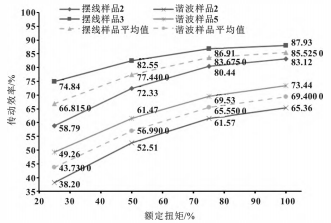
图6 同规格减速器传动效率对比
通过传动效率试验结果分析,总体上来说,国产行星摆线减速器基本能达到标准要求,相比于进口品牌差距不大; 谐波减速器传动效率整体不高,但是整体与进口品牌的差距不小。相比谐波减速器,行星摆线减速器的传动方式更为新颖,传动更为平稳,应用更为广泛,所以行星摆线减速器与国外进口品牌差距的缩小,也体现了减速器国产化的成效。同时,国内的减速器厂家仍需加强产品质量 一致性,从而提升国产减速器的生产水平。
03 Number 结束语:
本文选取了国内外生产的行星摆线减速器和谐波减速器,进行传动效率试验。试验结果证明国产减速器发展水平与国外的差距在减小,对减速器国产化的发展提供参考数据。
审核编辑:刘清
-
工业机器人核心零部件市场分析2018-03-21 0
-
减速机在工业机器人的应用2018-09-18 0
-
桁架机器人核心配件介绍2018-11-22 0
-
为什么工业机器人还需要减速器呢2021-09-03 0
-
国产机器人突破的关键:减速器2017-03-10 9245
-
工业机器人减速器概述2017-10-09 6376
-
减速器缺货对工业机器人的影响2017-10-09 1039
-
我国机器人减速器在市场的规模分析2018-06-29 1092
-
工业机器人的Rv减速器和谐波减速器对比分析2018-04-15 100141
-
日本垄断工业机器人用的精密减速器有多厉害2018-11-20 6854
-
RV减速器和谐波减速器的对比分析2018-11-21 39882
-
国内机器人精密谐波减速器瓶颈逐渐破局!2019-06-26 5139
-
高精密RV减速器在工业机器人应用中的重要性2019-11-20 3535
-
工业机器人的Rv减速器和谐波减速器有什么区别2022-04-06 2619
-
工业机器人的RV减速器和谐波减速器有什么区别?2023-10-10 671
全部0条评论

快来发表一下你的评论吧 !
