

智能车控制器功能介绍
描述
以简单的智能车为例,一般会存在两个控制器,一个是运行ROS的主控,另一个是运行电机控制和传感器信息采集的单片机比如STM32。
由于存在多个控制器,完成一个机器人的具体任务,那么这多个控制器间则需要建立通信,本篇博客主要讲解:
- 如何实现ROS主控和STM32之间的通信
- ROS主控对STM32发送过来的数据做哪些处理
以智能车的应用例程展开
智能车控制器功能
在智能车里存在两个控制器:
- ROS主控
- STM32控制器
只要能将ROS跑起来就可以作为ROS主控,ROS主控可以是:
- jetson
系列,例如 nano、tx、nx - 树莓派
- 工控机
在智能车里,ROS主控主要实现的功能有:
- 雷达信息采集
- 摄像头信息采集
- 路径规划
- 定位
STM32
控制器主要实现的功能有:
- 里程计信息采集
- 陀螺仪信息采集
- 电机控制
通信内容
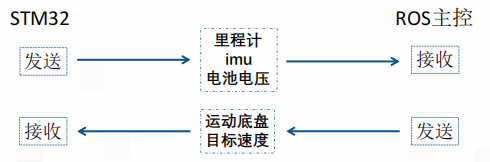
ROS主控负责接收stm32发送过来的传感器数据
数据有里程计、imu、电池电压。其中里程计就是电机的转速,通过编码器采集到。
STM32负责接收ROS主控发送过来的运动底盘的目标速度,STM32再完成电机转速的控制,最终实现小车的移动任务
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
智能车设计基础2012-10-21 0
-
触屏寻迹智能车使用“安芯一号”SLH89F51622013-10-15 0
-
多功能智能车2013-10-20 0
-
实时监控防火智能车2014-04-29 0
-
基于labview的智能车控制系统2015-04-26 0
-
PID的智能车控制算法研究2016-07-18 0
-
树莓派智能车AlphaBot系列教程2017-05-15 0
-
智能车系统解决方案总体设计2018-10-24 0
-
基于光电管路径识别的智能车系统设计2018-11-06 0
-
基于红外传感技术的STM32智能车2019-02-28 0
-
怎么实现基于9S12DG128的智能车控制系统设计?2021-05-18 0
-
怎样去设计一款完整的智能车2021-07-29 0
-
智能车制作相关资料分享2022-01-17 0
-
双舵机模糊控制在智能车控制中的应用介绍2023-09-19 0
-
智能车控制器功能有哪些2023-11-26 820
全部0条评论

快来发表一下你的评论吧 !
