

IMU/GNSS与车体外参标定
描述
作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参标定和在线标定问题。
下图是我们常用的几个坐标系,而对于常用的外参问题经常是IMU/GNSS与车体坐标的外参、Lidar和Camera的外参、Lidar和Lidar的外参、Lidar和IMU/GNSS的外参。

- 离线外参标定
1.1 IMU/GNSS与车体外参标定
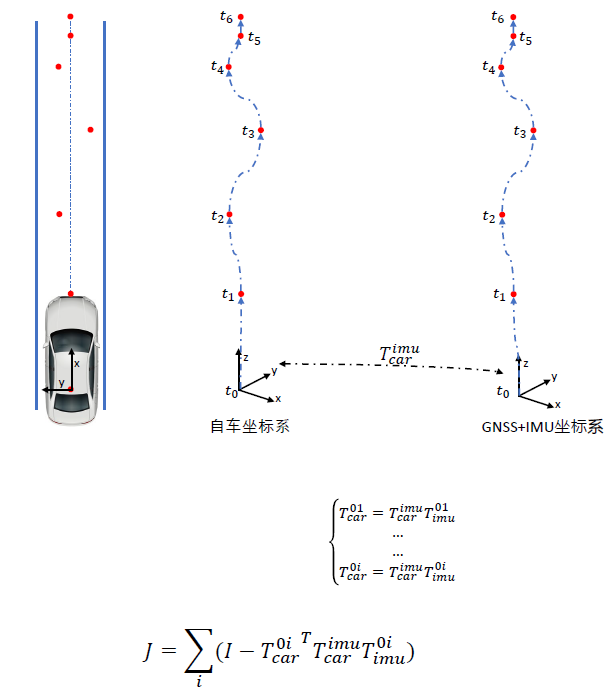
这个IMU/GNSS与车体外参标定如下图所示,主要需要获取**T_{car}^{imu}**坐标系,这一类IMU/GNSS设备通过内部的紧耦合可以综合输出一系列校准后的位姿信息。
同时IMU的输出频率是很高的,所以通过插值的形式可以有效地提高整体综合的频率输出。
为了去标定外参,一般的方法是获取位姿运动的位姿序列,并通过GNSS/IMU来观测车辆自身的运动(有的时候我们可以通过绕圈的形式+手持点测绘来对车辆自身坐标和GNSS坐标进行匹配计算)。
通过获取很多个观测和gnss的转换可以得到cost fuction参与到里面去优化。
这里我们也给出了基于车体坐标系odom和IMU的位姿联合矫正的相关代码,考虑到IMU和轮速计的数据收集过程中本身在时间上就很难做到完全对齐,此时引入时间偏移(delta_t)用于表示两者采集时间片之间的误差,通过循环标定新产生的轮速计数据和原先的IMU
数据,选取误差最小的结果作为最终两者之间的标定,相应的(delta_t)即认为两者采集时间的偏差。
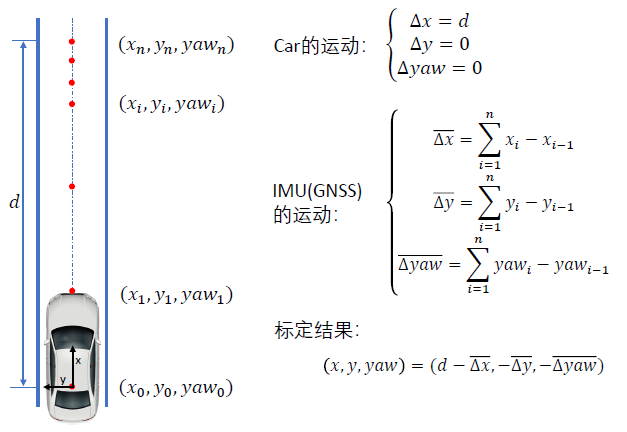
其实作为车辆来说,在平面测量后,其实只需要观测x,y,yaw即可。所以可以将用直线来做约束和校准,得到下图的公式:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
GNSS+IMU+MM车载高精度组合导航定位系统对比分析2022-10-21 2824
-
GNSS仿真引擎Skydel软件使用培训课程-先导课 #GNSS模拟 #GNSS仿真 #gnss虹科卫星与无线电通信 2024-05-20
-
激光雷达和相机之间的外参标定2019-04-12 0
-
3DM-GX5-15 惯性测试单元IMU2020-12-07 0
-
IMU 3DM-GX5-252020-12-16 0
-
IMU误差来源/表达式/标定2020-12-24 0
-
如何使用imu_utils工具生成IMU的Allan方差标定曲线?2021-11-22 0
-
IMU为嵌入式应用提供更精细的定位分辨率2019-01-17 3879
-
基于CP-132UL V2的标定测试软件实现完成对IMU的标定工作2020-08-13 1090
-
向高端类IMU应用迈步—国产IMU技术应用分析2021-09-04 5029
-
GNSS+IMU+MM车载组合导航系统解决方案2021-09-17 1979
-
高精度IMU在AVP场景中的应用2022-09-30 778
-
一种易于实现的无外部设备IMU校准方法2023-05-24 959
-
IMU测量原理与标定算法的实现2023-06-02 3087
-
自动驾驶传感器标定任务有哪些内容 自动驾驶传感器如何标定的呢2023-08-01 320
全部0条评论

快来发表一下你的评论吧 !
