

足端复合摆线轨迹介绍
描述
一、摆线
摆线,又称旋轮线、圆滚线,在数学中,摆线(Cycloid)被定义为,一个圆沿一条直线运动时,圆边界上一定点所形成的轨迹。它是一般旋轮线的一种。
总结成数学公式为:
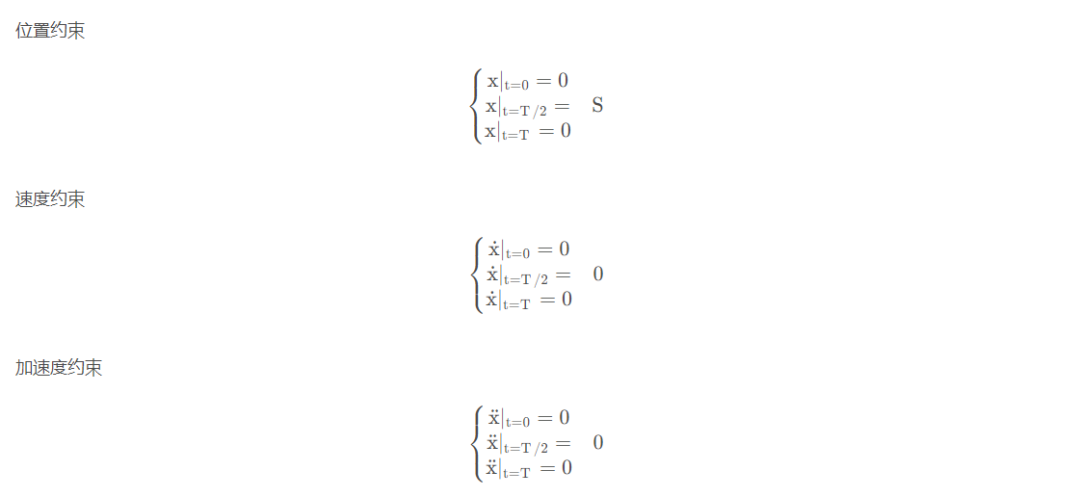
二、足端轨迹约束方程
为达到理想的步态,足端轨迹规划需要满足:
① 行进平稳、协调,无明显的上下波动、左右摇晃和前后冲击;
② 各关节没有较大冲击,特别是摆动相抬腿和落地瞬间实现零冲击抬腿和落地软着陆;
③ 摆动腿跨步迅速,足端轨迹圆滑,关节速度和加速度平滑连续无畸点;
④ 避免足端与地面接触时产生滑动,无摆动腿拖地现象。

1、水平x方向
2、竖直y方向

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
简要介绍波特图和根轨迹2011-12-07 0
-
摆线减速机的工作原理是什么?2019-09-20 0
-
分解式虚拟模型步态算法VMC介绍2021-09-15 0
-
分享大神的毕业设计-履带四足复合机器人2022-06-09 0
-
每周精选 | 履带四足复合机器人开源分享,OpenHarmony开源开发者成长计划2022-06-10 0
-
绘制根轨迹的MATLAB函数介绍2009-07-27 6933
-
摆线针轮减速机使用说明和注意事项2009-09-12 10227
-
X、B摆线针轮减速机使用及润滑知识2009-09-12 2157
-
摆线针轮减速机原理图、结构图、性能及型号表示方法2009-09-12 36720
-
复合管的相关知识的介绍2017-11-23 773
-
不同油槽结构的摆线泵内流场仿真2018-01-31 839
-
根轨迹法的详细教程课件免费下载2020-01-09 864
-
USB复合设备介绍2023-08-01 103
-
机器人摆动相轨迹设计2023-11-22 240
-
摆线针轮行星减速器的工作原理2024-01-19 411
全部0条评论

快来发表一下你的评论吧 !
