

机器人故障分析和解决方法
描述
报警图片
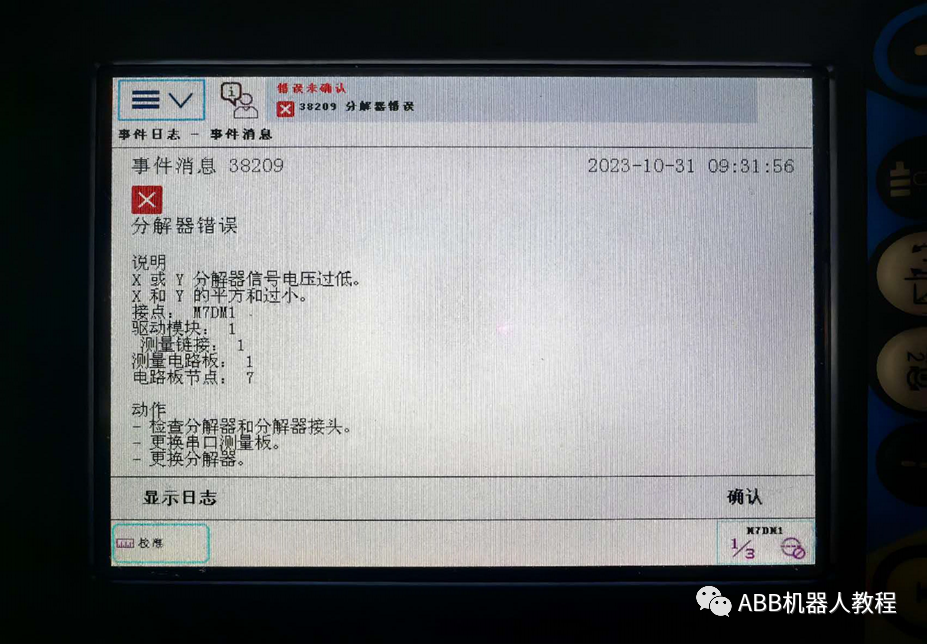
报警说明
| 序号 | 名称 | 说明 |
| 1 | 接点:M7DM1 | M7DM1一般指向机器人的外部轴(第七轴) |
| 2 | 测量链接:1 | 指向机器人的第一个测量板即SMB板 |
| 3 | 电路板节点:7 | 指向SMB板的第7号通道 |
动作:
--检查分解器和分解器接头【分解器指电机编码器】
--更换串口测量板【串口测量板指机器人的SMB板】
--更换分解器
故障表现:
机器人使能上电时会报此故障,导致机器人无法上电无法电机开启;
该轴的零位丢失,需要更新该轴转数计数器。
分析:
通过报警说明和动作基本上可以判断故障为机器人的外部轴(第七轴)编码器这一路的问题,电机、线缆、SMB板都有可能
根据故障报警一般指向性:
1. 检查电机编码器插头与编码器线直接连接是否正常;
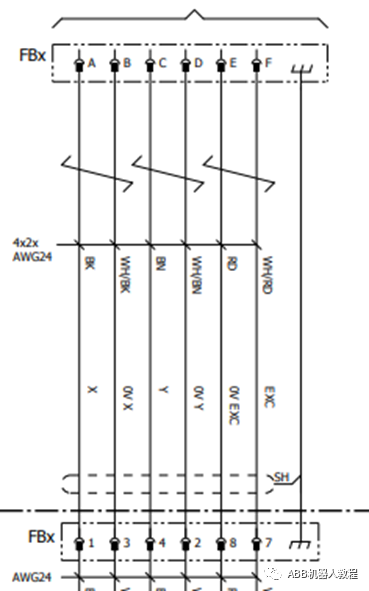
2.该外部轴编码器线缆问题;用万用表量一下编码器线的通断(A-1,B-3,C-4,D-2,E-8,F-7) 如电路图:
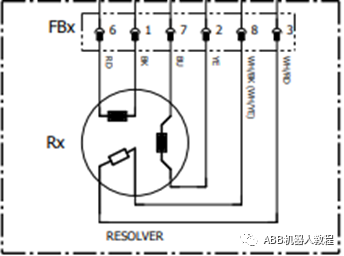
3.判断一下电机的编码器是否损坏,用万用表量一下阻值,外轴电机(MU系列)编码器插头FB处,1和6电阻大约在200欧,2和7 电阻大约在200欧,3和8电阻大约在31欧;
4.更换SMB板,以IRB4600机器人为例,SMB板在机器人屁股后面;
5.对于新机进行外部轴配置时,如果电机编码器线未插或硬件连接与系统配置的外部轴测量通道不一致也有此报警;
6.典型案例:电机编码器插针插针被插弯的情况,导致无法正常连接。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人视觉——机器人的“眼睛”2015-01-23 0
-
【机器人在线】工业喷涂机器人误差修正方法发展趋势2017-07-13 0
-
机器人的主要技术参数2017-08-15 0
-
贴片机送料器系统的故障表现和解决方法2018-09-07 0
-
机器人基础书籍2019-05-22 0
-
安川机器人伺服电机维修,常见机器人伺故障服电机和维修方法2020-06-30 0
-
青岛ABB工业机器人无法正常进入系统故障维修2020-07-16 0
-
库卡工业机器人显示HPU或者RCP故障维修2020-09-04 0
-
发那科2000iB机器人焊接时出现焊点整体偏移故障维修2020-09-07 0
-
ABB机器人发生不一致路径精确性故障维修2020-09-09 0
-
工业机器人故障诊断实训平台结果2021-07-01 0
-
刚柔软机器人设计与仿真分析实例解析2021-09-02 0
-
abb机器人电源模块短路板短路故障处理2021-09-17 0
-
ABB机器人伺服电机维修常见故障是什么?2021-09-29 0
-
变频器过热的故障原因和解决方法2023-10-24 2142
全部0条评论

快来发表一下你的评论吧 !
