

峰值电流模式控制在移相全桥变换器中的应用
电子说
描述
随着我国科技的发展和工业化进程的进一步提高,对通信开关电源和电力操作直流电源的效率、功率密度、可靠性和EMI 等提出了更高的要求。因此就需要采用新的主电路拓扑结构和采用新的PWM控制模式。
目前研究较多的就是移相全桥软开关PWM 变换器的电路拓扑。其PWM控制模式也有电压模式控制和电流模式控制两种。传统的开关电源普遍采用电压模式控制的PWM技术,但在此控制模式下系统的动态响应速度比较慢。峰值电流模式控制的PWM技术正是针对电压模式控制PWM技术的缺点发展起来的。
该模式控制因动态响应速度快、补偿电路简化、增益带宽大、易于均流等优点而被广泛应用。在移相全桥变换器中,控制策略多采用峰值电流模式控制。
2 两种PWM控制模式基本原理及特点
2.1 两种PWM控制模式的基本原理
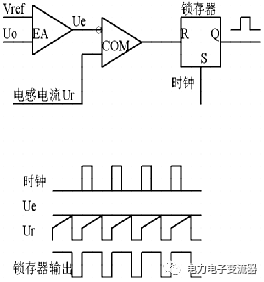
图1(a)为电压模式控制的PWM原理图。由图可以看出电压模式控制只有一个电压反馈闭环,采用脉冲宽度调制法。它工作的基本原理是:输出电压Uo与参考电压Uref经误差放大器EA放大后得到了一个误差电压信号Ue,Ue再与振荡电路产生的固定锯齿波电压经PWM比较器COM比较,由锁存器输出占空比随误差电压信号Ue变化的一系列脉冲。图1(b)为峰值电流模式控制的PWM原理图。由图可以看出,它是一个双闭环控制系统,电压外环控制电流内环。
它工作的基本原理是:输出电压Uo与参考电压Uref经误差放大器EA放大后得到一个误差电压信号Ue,Ue再与电感电流的采样电压Ur比较,由恒频时钟脉冲置位锁存器输出脉冲。当Ur幅度达到Ue电平时,PWM比较器的状态反转,锁存器复位,驱动撤除,功率管关断,电路逐个地检测和调节电流脉冲,由此控制电源输出的电压。
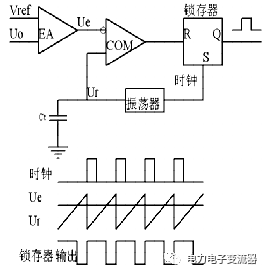
(a)电压模式控制 (b)峰值电流模式控制
图1 电压模式控制和峰值电流模式控制PWM原理图
2.2 两种PWM控制模式的特点
电压模式控制采用单一反馈电压闭环设计,因此调试比较容易。此外PWM比较器的锯齿波振幅较大,在调制过程具有较好的抗噪声裕量。且它的低阻抗功率输出,对多输出电源具有较好的交互调节特性。但它对输入电压的变化动态响应速度较慢,且输出的LC滤波器又给控制环增加了双极点,在补偿设计误差放大器时就需要将主导极点低频衰减,或是增加一个零点进行补偿。
峰值电流模式控制PWM是双闭环控制系统,电压外环控制电流内环。电流环只负责输出电感的动态变化,而电压环仅需控制输出电容,不必控制LC储能电路。因此峰值电流模式控制PWM具有比电压模式控制大得多的带宽。它具有以下优点:(1)具有良好的线性调整率和快速的输入输出动态响应;(2)固有的逐个脉冲电流限制,简化了过载保护和短路保护,在推挽电路和全桥电路中具有自动磁通平衡功能;(3)消除了输出滤波电感带来的极点和系统的二阶特性,使系统不存在有条件的环路稳定性问题,具有最佳的大信号特性;(4)多电源单元并联易
于实现自动均流。但它同时又具有以下缺点:(1)需要双环控制,增加了电路设计和分析的难度;(2)电流上升率不够大,在没有斜坡补偿时,当占空比大于50 %时,控制环变得不稳定,抗干扰性能差;(3)控制信号来自输出电流,功率级电路的谐振会给控制环带来噪声;(4)控制环控制电流,使负载调整率变差,在多路输出时,需要耦合电感实现交互调节。
3 峰值电流模式控制的稳定性分析及斜坡补偿
3.1 峰值电流模式控制的稳定性分析
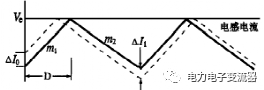
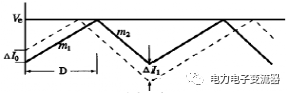
采用峰值电流模式控制的电路,在没有斜坡补偿时,当占空比大于50 %时,控制环就会变得不稳定,其具体原因分析如下。图2 中,Ve 是误差放大器输出的误差电压信号,△Io 是扰动电流,m1、m2分别是电感电流的上升沿及下降沿斜率。实线为实际输出的电感电流,虚线为无扰动时的电感电流。由于开关频率通常都较高,因此这里假定在
开关周期内,电感电流是线性变化的。令e为△Io所引起的偏差,根据几何关系,可得相邻开关周期内e的递推表达式:
 (1)
(1)
则第n周期的误差:
 (2)
(2)
因此当m1>m2时,也就是占空比小于50%,误差是收敛的,其频率为开关频率的1/2,振幅逐渐趋向于零,系统是稳定的;而当m1时,此时占空比大于50%,误差是发散的,系统不稳定。
(a)占空比小于50%
(b)占空比大于50%
图2 峰值电流模式控制系统中电感电流对扰动的响应
3.2 斜坡补偿原理
由上述分析知,当占空比大于50%时,此时电感电流上升率小于电感电流下降率,系统是不稳定的。为了解决这一问题,需要引入斜坡补偿,如图3所示。
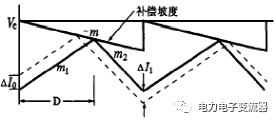
图3 峰值电流模式控制的斜坡补偿
图中m为补偿斜率,由几何关系可知,加入斜坡补偿后的误差递推表达式为:
 (3)
(3)
因此选择合适的m,就可以使
 <1< span=""> (4)
<1< span=""> (4)
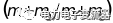
满足(4)式就可确保系统的稳定性。由图3和上面的补偿后的误差表达式可知,当选择补偿斜率m等于电感电流下降沿的斜率m2,这时扰动信号在一个周期内就完成了校正,如图4所示。
图4 补偿坡度等于m2的斜坡补偿
3.3 斜坡补偿电路设计
根据图1峰值电流控制的电路图可以看到,加入斜坡补偿有两种方法。一种是将斜坡补偿信号加到电流检测信号中,也就是加到PWM比较器的同相端。另一种是将斜坡补偿信号从误差电压信号中减去,实际上间接加到PWM比较器的反相端。由于第二种方法的斜坡补偿信号不是直接加到PWM比较器上的,实现起来就相对困难些。因此我们主要讨论第一种方法的实现。
图5为斜坡补偿简化电路。从图中可以看出,锯齿波输入脚RAMP的信号为原边的电流信号和晶振脚Vslope的输出信号叠加得到的。 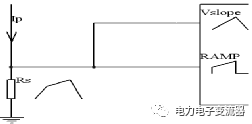
图5 斜坡补偿的简化电路
图6为斜坡补偿的等效电路,由此可以算出斜坡补偿后加到芯片锯齿波输入脚的电压:
 (5)
(5)
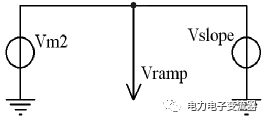
图6 斜坡补偿等效电路
因此斜坡补偿电压 。由前面分析知,当选择补偿斜率m等于电感电流下降沿的斜率m2时,扰动信号在一个周期内就完成了校正。但在实际应用时,根据经验常选m在0.5~1之间。令
。由前面分析知,当选择补偿斜率m等于电感电流下降沿的斜率m2时,扰动信号在一个周期内就完成了校正。但在实际应用时,根据经验常选m在0.5~1之间。令 ,可得到补偿的锯齿波斜率:
,可得到补偿的锯齿波斜率:
 。 (6)
。 (6)
对于BOOST电路,电感电流上升的斜率: (7)
(7)
由于输入电压 随电网变化,所以补偿值不恒定,这样对于固定补偿网络,很多时候会发生过补偿或补偿不足,降低了电路的性能并导致波形畸变, 因此BOOST电路通常不采用峰值电流模式控制。而对于BUCK型移相全桥变换器电路,有
随电网变化,所以补偿值不恒定,这样对于固定补偿网络,很多时候会发生过补偿或补偿不足,降低了电路的性能并导致波形畸变, 因此BOOST电路通常不采用峰值电流模式控制。而对于BUCK型移相全桥变换器电路,有
 (8)此时斜坡补偿值恒定且容易计算。
(8)此时斜坡补偿值恒定且容易计算。
4移相全桥零电压开关变换器控制电路的设计
美国Unitrode公司针对移相控制方案推出了UC3875芯片。该集成电路用一个半桥支路对另一个半桥支路的移相开关实行全桥功率级的控制,使得固定PWM与谐振零电压开关相结合,在高频具有高效性能。它主要包括以下九个方面的功能:工作电源、基准电源、振荡器、锯齿波、移相控制信号发生电路、过流保护、死区时间设置、输出级、误差放大器和软启动 。该PWM控制器使移相全桥变换器控制电路的设计大为简化。控制电路主要可分为如下几部分:电路的参数设置,电压电流反馈环节,输出电流限制,电路的保护等。下面主要讨论峰值电流模式控制下的斜坡补偿问题,其它的在此均不作讨论。
。该PWM控制器使移相全桥变换器控制电路的设计大为简化。控制电路主要可分为如下几部分:电路的参数设置,电压电流反馈环节,输出电流限制,电路的保护等。下面主要讨论峰值电流模式控制下的斜坡补偿问题,其它的在此均不作讨论。
由前面分析可知,采用峰值电流模式控制需要进行斜坡补偿。UC3875芯片内部有锯齿波发生器和斜坡补偿电路。斜坡设置脚SLOPE与某一个电源Vx之间接一个电阻Rslope,为锯齿波脚RAMP提供一个电流为 的恒流源,其中Vx通常接芯片的基准电源Vref。在RAMP脚与信号地GND之间接一个电容Cramp,就决定了锯齿波的斜率:
的恒流源,其中Vx通常接芯片的基准电源Vref。在RAMP脚与信号地GND之间接一个电容Cramp,就决定了锯齿波的斜率:
 (9)
(9)
另外,选定了Rslope和Cramp,同时也就决定了锯齿波的幅值 ,其中T为锯齿波产生的周期。把此固定斜率的锯齿波输入到PWM比较器就构成了电压控制型。若在此基础上,把原边电流采样信号叠加在RAMP脚作电流取样输入到PWM比较器,就构成了峰值电流模式控制。具体接法如图7所示。则需要补偿的斜率:
,其中T为锯齿波产生的周期。把此固定斜率的锯齿波输入到PWM比较器就构成了电压控制型。若在此基础上,把原边电流采样信号叠加在RAMP脚作电流取样输入到PWM比较器,就构成了峰值电流模式控制。具体接法如图7所示。则需要补偿的斜率:
= (10)
(10)
根据上面所述就可计算出斜坡补偿电路的参数。
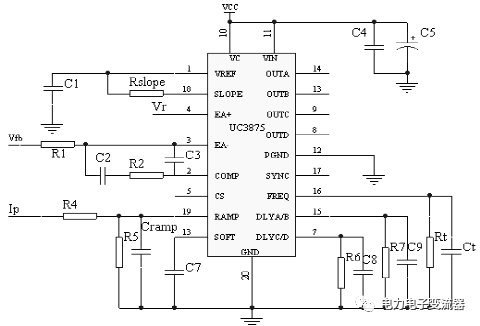
图7 移相全桥零电压开关变换器的控制电路
5结论
峰值电流模式控制的系统稳定性好,响应速度快,实现也很容易,并且能够限制电路中的峰值电流,从而保护器件。对此控制电路采用斜坡补偿可以增加电路稳定性,改善电路的性能, 特别对占空比大于50%的电路,进行斜坡补偿是必要的。实验表明,采用此控制策略应用在移相全桥变换器中,明显的改善了系统的性能。
-
 jf_25465199
2023-12-05
0 回复 举报图片怎么都看不到 收起回复
jf_25465199
2023-12-05
0 回复 举报图片怎么都看不到 收起回复
-
【实操】移相全桥DC-DC变换器快速设计与开发2023-12-21 0
-
移相全桥ZVS PWM控制器2015-10-21 0
-
移相全桥控制的问题2018-12-18 0
-
移相全桥+UCC28950原边电流波形有大小波2019-03-05 0
-
资料分享:LLC 谐振变换器的研究2019-09-28 0
-
如何对移相全桥谐振ZVS变换器进行测试?2021-04-22 0
-
STM32单片机用于移相控制的全桥PWM变换器2021-08-09 0
-
移相全桥有哪几种工作模式2021-10-15 0
-
利用PPEC 控制器来实现移相全桥电路控制分享2022-05-19 0
-
「分享」移相全桥DC-DC变换器建模及仿真2023-12-04 0
-
正激变换器的峰值电流控制模式的建模2011-10-24 1329
-
峰值电流模式控制数字移相全桥变换器的分析与设计_王均2017-01-07 1056
全部0条评论

快来发表一下你的评论吧 !
