

双极四线式和六线式步进马达的接线方式
电子说
描述
上一回我们简单聊了步进马达里面的结构,以及它为什么可以用小角度一步一步转动的原理,另外也介绍了两相式步进马达常见的两种接线方式。
这一回我们要来看看如何在线圈上产生让马达转所需要的波形。
接线方式
我们以最常见的双极双相步进马达为例。上次提过,这种步进马达有四线式和六线式两种出线方式:
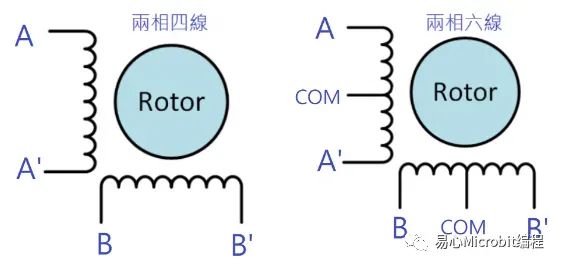
这种结构的步进马达里面有两大组线圈,可以称之为 A 线圈和 B 线圈。它的驱动方式是:
1.A 相正向激磁
2.B 相正向激磁
3.A 相反向激磁
4.B 相反向激磁
因为两组线圈都要可以正向和反向激磁,因此称之为「双极」(bipolar)步进马达。
至于要让线圈的磁场方向反过来,有两种不同的方式,最简单的当然就是让流过线圈的电流方向反过来。如果电流从 A 接脚流向 A’接脚时是正向激磁,那么电流从 A’流向 A 时就是反向激磁。
但要能转换电流方向的电路比较复杂,因此就有另一种变形的设计:六线式的步进马达。六线式的马达一样有 A 和 B 两组线圈,但它们的线圈有个「中间抽头」,就是在线圈中间位置的一个接点,如果电流从 A 流向中间抽头时是正向激磁,那么电流从 A’流向中间抽头时就是反向激磁。
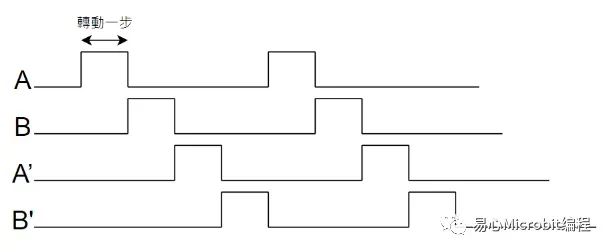
我们把六线式马达的两根 COM 都接地,再轮流驱动 A、B、A’、B’,马达就会朝一个方向旋转,这时的驱动波形是这样的:
要产生并驱动这样的波形,只需要四颗晶体管。电路大概是这样:
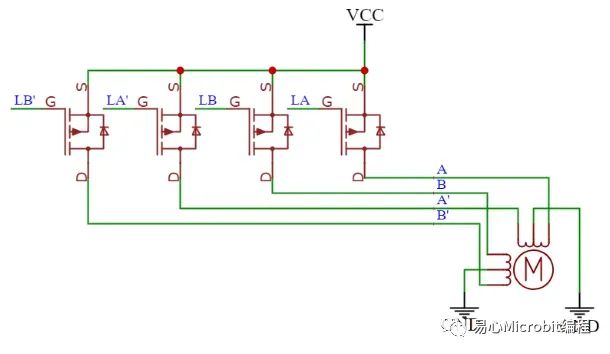
我们可以用 LA、LB、LA‘、LB’四个小讯号去控制 MOSFET 的导通,来产生 A、B、A’、B’四个驱动马达所需要的讯号。
注意这里使用的 MOSFET 是 P-channel 的 MOSFET,因为当我们这样驱动时,负载是在 MOSFET 开关的后面,用马达驱动的术语来说,这是个「high-side driver」,当它导通时电流是先流过晶体管再到负载,而因为 MOSFET 导通时的电阻很小,晶体管本人上的电压差也就很小,所有的 VCC 电压几乎都由马达线圈承受,但由于 MOSFET 有一端接在电源上,因此不管是 source 还是 drain 的电压都会很接近电源电压;如果用 N-channel 的 MOSFET 来驱动的话,我们就会需要比电源电压更高的 gate 电压,才能驱使 N-channe MOSFET 导通。
因此在马达驱动电路的设计上,high-side driver 多半都使用 P-channel MOSFET,而反过来说,接在负载后面的 low-side driver 则多半使用 N-channel MOSFET。
如果是四线式的步进马达,要用什么样的电路,才能让电流的方向反转呢?这时后就会用到「H 电桥」了。H 电桥是用来做双向驱动最常用的电路,它长这样:
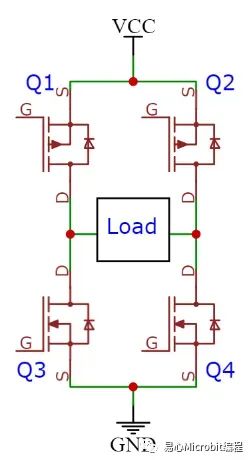
这个电路需要四颗晶体管,而且一次需要开两颗。
当我们将 Q1、Q4 打开让它们导通时,电流会由负载的左方流向右方,而如果将 Q2、Q3 打开的话,电流就会由负载的右方流向左方。
虽然这个电路可以让电流的方向反转,但它需要用到四颗晶体管来驱动一组负载。在四线式的步进马达上有两组线圈要驱动,因此总共会用到八颗晶体管,所需要的晶体管数量是六线式的两倍,因此四线式的步进马达虽然绕组设计比较简单,但驱动电路的复杂度却比较高。
小结
这一回我们介绍了双极四线式和六线式步进马达的接线方式,以及驱动它们所需要的程序与讯号,也介绍了驱动电路的结构,以及改变电流方向的方法,但由于驱动四线式步进马达的一组线圈就需要用到四颗晶体管,两组线圈要用八颗,这样的电路用离散组件来拼其实蛮麻烦的,因此市面上有很多单颗 IC 就可以搞定步进马达驱动的产品,除了放大电流的驱动电路外,这些 IC 里面还有逻辑电路,可以用来简化驱动步进马达所需要的讯号。
下一回,我们会继续聊聊这些专门用来控制、驱动步进马达的 IC。
审核编辑:汤梓红
-
称重传感器的六线接法2010-11-20 0
-
二相六线步进电机的驱动2015-07-18 0
-
六线制称重传感器的介绍2016-04-18 0
-
四线双极性步进电机驱动时序要求是什么?怎么模拟的?2018-06-05 0
-
六线制称重传感器的应用2018-12-04 0
-
四线制的称重传感器怎么和仪表连接2020-04-25 0
-
四线/六线称重传感器接线图2020-12-08 0
-
通过简单的接线配置将单极步进电机驱动为双极步进电机2020-12-17 0
-
步进电机的驱动和接线原理是什么?2021-07-08 0
-
两相四线制步进电机驱动的原理是什么?2021-07-08 0
-
步进电机是如何进行接线的?2021-07-08 0
-
如何去编写TB6600驱动二相四线步进电机的程序?2021-07-15 0
-
如何用Proteus设计一四相六线步进电视控制电路?2021-10-21 0
-
双极性四线步进电机TC1508S的程序分享2021-12-21 0
-
两相步进电机与驱动器是如何进行连接的呢?2023-03-01 0
全部0条评论

快来发表一下你的评论吧 !
