

离散域下内置式永磁同步电机复矢量电流调节器设计
电子说
描述
导读:本期文章主要介绍离散域下内置式永磁同步电机复矢量电流调节器的设计。通过与传统的线性PI调节器仿真验证分析,离散域下设计的电流调节器削弱了d、q之间耦合的影响,大大提高了系统的控制性能。
一、引言
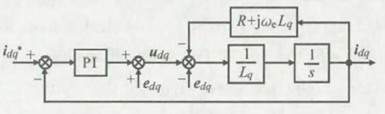
图1-1 传统线性PI调节器控制框图
传统矢量控制中线性PI调节器的电流内环分别采用d、q轴两个独立的控制环,受到环路间存在交叉耦合项、控制器离散化处理时产生的误差、数字控制系统延时等因素的影响,同时该耦合项与同步角频率成正比,使得传统的线性PI调节器不能完全实现独立设计,从而导致交流电机的控制精度受到影响。在实际应用中大都采用数字控制系统,传统方法基于连续域设计的调节器,最终还需要进行离散化处理,不可避免地引入误差。同时数字控制系统存在一拍延时,进一步降低控制系统的性能。
二、离散域电流调节器的设计
传统的线性PI调节器将电流内环分离成d、q轴两个控制环,由于环路之间存在交叉耦合项导致不能实现完全独立设计。而复矢量调节器将d、q轴电流环当成一个整体,与传统方法相比具有更优的控制性能和参数鲁棒性。
2.1 永磁同步电机数学模型
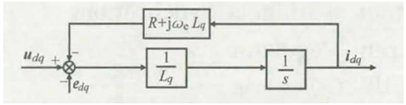
图2-1 IPMSM复矢量数学模型
从图(2-1)可以看出,通过复矢量的表示方法,IPMSM在同步坐标系中的d、q之间的耦合以电机模型极点的虚部形式来体现,虚部的大小与同步角频率有关。
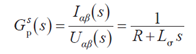
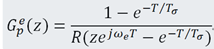
建立精确的数学模型是实现电流环高性能控制的关键。根据图(2-1),在静止坐标系中IPMSM模型可以由下面简单的电阻/电感复矢量传递函数来表示:
2.2 离散域下电流调节器的设计
为了在离散域内对电流调节器的设计和性能进行分析,对IPMSM在离散域内的建模至关重要。将上式所示的物理系统转换到离散域内的通常做法是将逆变器作为一个理想的零阶保持器,则在静止坐标系中感应电机模型在离散域内的表示为:

进行离散化处理后,得到:
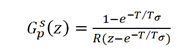
将上式转换成同步旋转坐标系下的差分方程,然后得到旋转坐标系中的感应电机数学模型在离散域中的传递函数为:
引入直接离散的复矢量电流调节器,通过在离散域内直接对电流调节器进行设计,使离散电流调节器的零点与离散的电机模型的极点对消,避免了由离散化导致电流调节器性能的偏差。
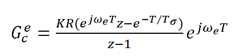
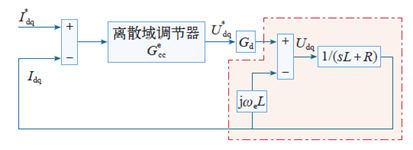
图2-2 离散域调节器的控制框图
三、仿真建模与波形分析
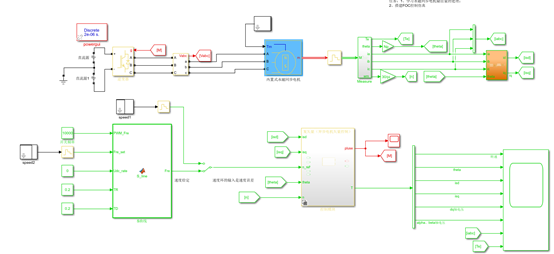
图3-1 内置式永磁同步电机矢量控制系统仿真
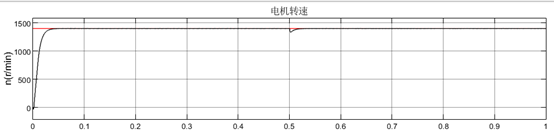
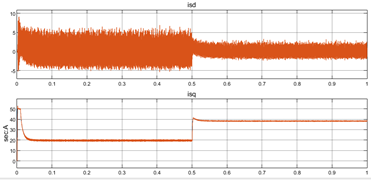
图3-2 传统线性PI电流调节器(1400rpm)
从图(3-2)可以发现:由于d、q轴之间存在交叉耦合,在高速区域时d、q轴电流的纹波较大。由于d、q轴存在耦合,重构的静止坐标系下的定子电压也随之劣化,如图(3-3)所示。
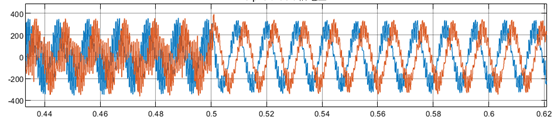
图3-3 重构的电压(静止坐标系下)
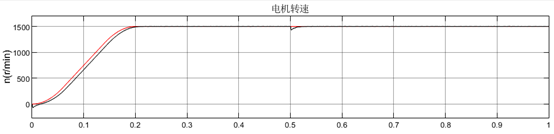
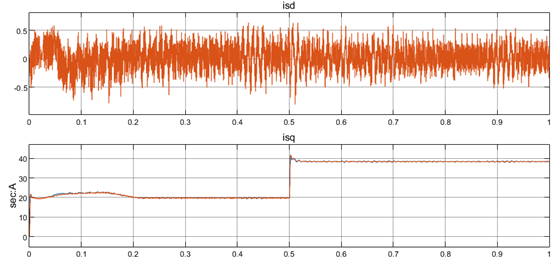
图3-4 离散域下PI电流调节器(1400rpm)
从图(3-4)可以发现:d、q轴电流的纹波明显减小,耦合关联程度降低。重构的电压也趋于正弦。
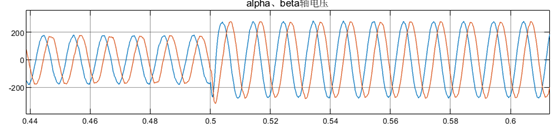
图3-5 重构的电压(静止坐标系下)
四、总结
把d、q轴当成一个整体,在离散域下建立电流环数学模型,同时考虑数字控制系统的一拍延迟来直接设计离散域电流调节器。通过仿真对比验证,采用优化设计的电流调节器,d、q轴电流动态响应快且没有超调。削弱d、q轴之间的耦合,大大提高了整体控制性能。
审核编辑:汤梓红
-
两种不同结构的永磁同步电机特点说明2021-06-28 0
-
永磁同步电机的转子包括哪些部分2021-08-27 0
-
永磁同步电机面装式内置式和凸极性隐极性的对应关系2021-08-27 0
-
永磁同步电机简介2021-08-27 0
-
永磁同步电机spmsm和ipmsm有哪些区别2021-08-27 0
-
永磁同步电机(PMSM)的基本结构2021-08-27 0
-
永磁同步电机的电压方程和转矩方程2021-08-27 0
-
重点说一下永磁同步电机2021-08-27 0
-
表贴式和内置式永磁同步电机的特点是什么?2021-10-09 0
-
改进的内置式永磁同步电机转子位置检测2017-01-05 650
-
内置式永磁同步电机弱磁过渡时的解耦补偿控制_毛亮亮2017-01-08 737
-
两种不同结构的永磁永磁同步电机特点说明—表贴式和内置式2021-12-16 2958
-
永磁同步电机转速电流双闭环PI参数整定2023-03-14 284
-
永磁同步电机(PMSM)磁场定向控制(FOC)电流环PI调节器参数整定2023-03-15 352
-
内置式永磁同步电机复矢量电流调节器设计2023-10-23 349
全部0条评论

快来发表一下你的评论吧 !
