

智行者科技发布基于***的“重感知、轻地图”智驾解决方案
描述
今年4月份,智行者宣布成功获得某头部车企量产定点合作,成为国内首家基于***的软硬件一体高阶自动驾驶系统方案供应商。
时隔半年,智行者发布首个基于***的“重感知、轻地图”的智能驾驶解决方案,标志着智行者在核心技术方向的又一次跃迁。
目前,智行者轻地图方案已在自研的域控制器A200上部署实现,得益于A200的量产质量保证,该方案已稳定运行半年。A200是智行者推出的以国产大算力SoC和安全MCU为核心芯片的高性价比域控制器,其中SoC主要负责感知模型神经网络的高效处理,MCU主要负责车辆控制、安全监控等。
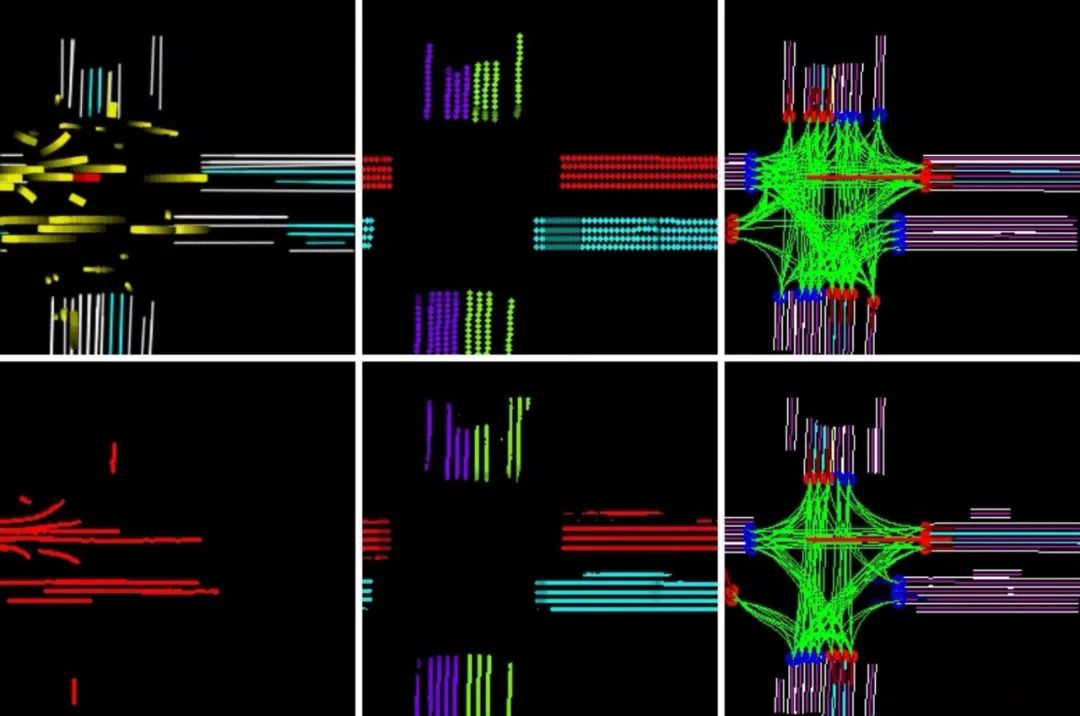
感知方案基于BEV框架,利用BEV特征融合方法完成目标检测、车道线、可行驶区域分割等任务。在该感知框架中,智行者采用基于BEV Queries的方法,通过将BEV Query的空间位置投影到各个视角,通过注意力机制对相关视角信息进行融合得到该Query的特征。同时,针对感知系统的空间碎片化问题,设计了一个时序特征融合模块,将历史时刻的BEV特征和当前时刻的BEV特征融合得到最终时空特征。基于该融合特征,系统可实现人车目标检测、路面标线检测、可行驶区域分割、标志牌检测识别等多个感知任务。
在感知方案中,模型的工程化部署尤为重要。智行者充分利用***的强大计算能力与多核心架构,将计算任务进行适当的分配和并行处理,并在模型精度和效率之间进行平衡设计,以提高感知模型的计算效率。基于多级流水设计,对BEV感知模型的算子进行了DSP移植,将通用算力释放到模型的其他部分。这种优化设计可以提高感知模型的运行效率并降低计算延迟,使得模型能够在实时场景下快速响应和处理感知数据。目前基于BEV的感知框架能够以20Hz以上帧率稳定运行,保证了对环境的实时感知和准确判断。
基于BEV感知模型输出的动静态环境信息,智行者进一步融合了导航地图的先验信息,提出了能够端到端重构自动驾驶车辆周围道路环境拓扑信息的Topology Flow模型。该模型不仅以BEV感知模型输出的静态车道线和道路标识为输入,还融合了动态障碍物的行驶轨迹和标准导航地图的结构化信息,对感知盲区和更远范围的道路拓扑结构进行推理预测。
Topology Flow模型旨在输出下游规控模块所需要的地图环境信息,除车道中心线和车道拓扑关系,还输出各种地图的关键点信息,重构出常规高精地图中存在的各种虚拟道路和标识,实现从有图方案无缝衔接到轻地图方案。
以下为智行者轻地图方案高速NOA功能的实车路测展示。当前轻地图方案可以从容处理高速巡航、超车换道、上下匝道、智慧避让等功能。同时,对他车近距离切入、大曲率转弯等特殊场景也能够平稳应对。凭借技术的迭代与升级,为乘客提供媲美有图方案的乘车体验。
凭借领先的技术优化和丰富的工程经验,智行者可为客户提供模块化的全栈软硬件解决方案,包括:标准化的视觉感知、激光感知、匹配定位模型;面向智能驾驶的中间件软件,协助客户快速进行功能开发;车规级高性价比的域控制器;基于图形化的数据采集、数据挖掘、模型训练与测评的数据闭环平台等。
-
如何利用GeoServer发布卫星地图服务2016-01-28 0
-
驾考科目三GPS电子路考仪OBD解决方案2016-09-01 0
-
车联网的轻数据轻服务整体解决方案。2017-06-08 0
-
感知系统性能评估分析解决方案 精选资料分享2021-07-27 0
-
求助,请问如何发布我的HarmonyOS组件或解决方案?2022-06-02 0
-
近距轻扫和运动感知视频展示雷达IC应用2022-11-16 0
-
我爱方案网:近距轻扫和运动感知视频展示雷达IC应用2022-11-17 0
-
H2TV双图旅行者3D界面地图数据2010-04-25 618
-
纽曼S1000旅行者3D界面地图数据2010-04-25 509
-
自动驾驶的感知定位与高精地图解决方案2018-06-08 16142
-
Apollo定位、感知、规划模块的基础-高精地图2018-08-12 9366
-
华为进入中国态势感知解决方案领导者位置2021-12-06 1862
-
智行者发布国内首款不依赖高精地图的高级别自动驾驶解决方案2022-08-19 2266
-
瑞声科技发布首个智能座舱与智能驾驶感知交互解决方案2022-12-30 447
全部0条评论

快来发表一下你的评论吧 !
