

水下仿生光磁导航技术的发展趋势探讨
描述
吴新冬 1申冲 1 曹慧亮 1王晨光 2唐军 1刘俊 1
1. 中北大学仪器与电子学院省部共建动态测试技术国家重点实验室,太原 030051;2. 中北大学信息与通信工程学院,太原 030051
【引用格式】吴新冬,申冲,曹慧亮,等.水下仿生光磁导航技术综述[J].战术导弹技术,2023(4):13-25.
摘 要针对水下导航资源受限的问题,受动物优异的自主导航能力的启发,对国内外水下仿生光磁导航技术进行了总结和回顾。从水下偏振光场、生物的地磁导航机理以及生物的光磁复合导航机理入手,介绍了水下仿生偏振光导航、仿生地磁导航以及仿生光磁复合导航的基本原理和研究现状;通过分析现有仿生导航方法的优势与限制,主要从提升复杂环境适应性的层面阐述了目前需要解决的关键问题;根据目前水下仿生光磁导航的研究现状,在导航原理、导航精度以及导航范围三个方面,探讨了水下仿生光磁导航技术的发展趋势,对水下仿生光磁导航技术进行了总结与展望。
关键词磁导航机理;仿生地磁;仿生偏振光;仿生组合导航;光磁复合导航;水下导航;水下偏振光场
1 引 言
近年来,水下导航技术受到了人们的广泛关注[1-3]。一方面,探测海洋中丰富的资源对导航技术提出了更高的要求;另一方面,水下军民领域任务如水下搜救、精密测量、环境感知、军事作战等,均需依赖于准确可靠的导航技术。当前,已经开发了各种各样应用于水下任务的导航技术,如水声定位、全球卫星导航、惯性导航等[4-8]。其中基于水声定位的导航方式受到海底应答器的制约,只能提供已知区域的导航信息;GPS或北斗等卫星导航技术在水下会受到高电磁损耗的阻碍;而惯性导航的漂移使得在水下航行时不得不利用辅助传感器定期对其误差归零。 在传统水下导航技术受到限制的条件下,模仿动物的导航能力去实现水下导航为我们提供了全新的思路。由进化筛选出的动物导航系统往往是高效且鲁棒的,因为自然界总是倾向于那些能在各类复杂条件下成功存活的个体。 本文从自然界中的光磁信息出发,回顾了仿生偏振光导航、仿生地磁导航和仿生光磁复合导航的发展流程以及当前的研究热点与关键问题,并对未来水下仿生光磁导航的发展趋势进行了展望。
2 仿生偏振光导航技术
目前普遍认为仿生偏振光导航技术可以追溯到1914年Felix Santschi的蚂蚁实验[9]。他首次发现了生物可以从天空的散射光中获得指南针信息。在1947年Karl von Frisch的蜜蜂实验[10]后迎来了偏振导航的研究热潮。 仿生偏振光导航技术是根据太阳光穿过大气层时产生的稳定模式而进行导航的技术,具有隐蔽、自主、无累计误差等优良特性,尤其适用于GPS拒止条件下的导航任务。此外,这种导航技术还有望扩大人类自身的感官知觉,使人类获得偏振导航感[11]。 当前,仿生偏振光导航传感器根据信息采集技术的不同,主要可分为基于光电二级管、基于多目相机以及基于焦平面分割等三类[12-16]。导航灵感主要来自于沙蚁、蜜蜂、蜣螂等生物[17-19],并通过模拟生物的正交子眼实现导航信息的获取,基本流程如图1所示。导航原理一般基于单散射瑞利模型,需要太阳光在测量之前要经历一次散射效应,并要求散射粒子小于入射光波长。在这一条件下,光的电矢量方向将垂直于太阳位置、观测者位置与散射粒子所形成的平面,即电矢量方向 可以利用表示观测者与太阳位置方向的太阳矢量
可以利用表示观测者与太阳位置方向的太阳矢量 以及观测者与散射粒子方向的观测矢量
以及观测者与散射粒子方向的观测矢量 来表示,即:
来表示,即:
 |
(1) |
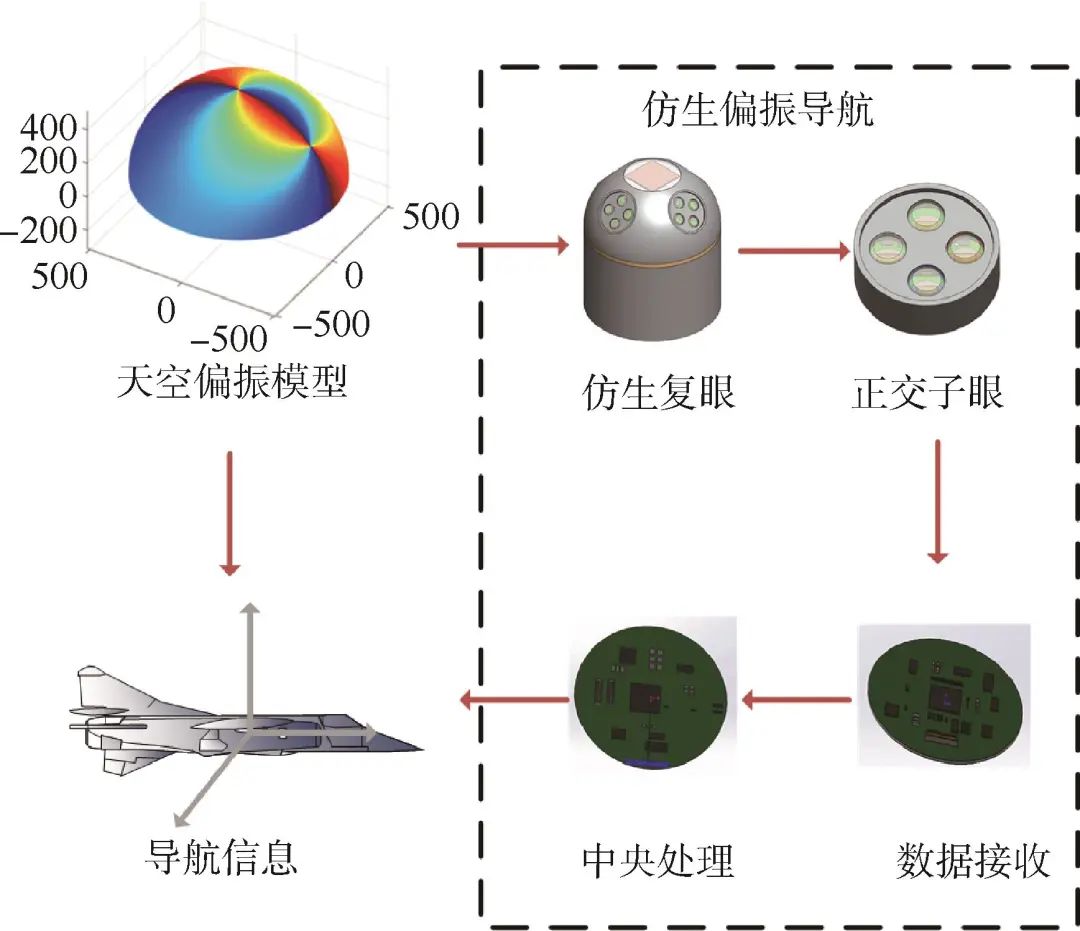
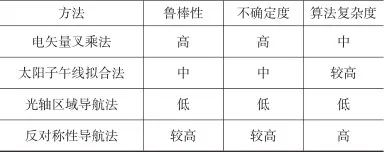
▲ 图1 仿生偏振导航示意图▲ Fig.1 Schematic diagram of biomimetic polarization navigation 目前,各类偏振导航方法基本均在此基础上展开,并通过测量太阳位置来实现导航,可主要分为电矢量叉乘法、太阳子午线拟合法、光轴(天顶)区域导航法以及反对称性导航法。 电矢量叉乘法只需要观测到任意两个不同观测位置下的电矢量方向即可实现太阳位置测量,具有最高的鲁棒性以及较快的处理速度,但受限于实际散射与单瑞利散射的区别,测量不确定度也会较高。 太阳子午线拟合法需要保证太阳方向区域的可观测性,在观测条件理想的情况下,即使只利用最小二乘法进行处理也可以得到较低的测量不确定度。但受限于其对观测条件的要求,鲁棒性较差;处理速度也会随着拟合方法的不同而发生变化,总体而言,算法复杂度略高于电矢量叉乘法。
光轴区域导航法只利用光轴附近的观测点,拥有最快的处理速度,但十分容易受到干扰。通常,这类导航方法主要用于高机动且天空无遮挡的环境。 反对称性导航法通过太阳子午线将偏振角划分为具有反对称特性的两部分,要求其中任意一部分未被完全遮挡,相较于太阳子午线拥有更高的鲁棒性,但受限于偏振角图像并非严格满足反对称特征,测量不确定度较高。 此外,仿生偏振光导航精度与天气、空气质量有关,天空越晴朗、空气质量越好,导航精度越高。当前的研究认为,在测试条件理想的情况下,航向角测量的极限精度可达角分级。苏黎世大学[13]构建了一个偏振光罗盘,并应用于移动机器人上;德国航空航天中心(DLR)[20]研制了轻量级偏振导航传感器,可实现对太阳位置的估计;美国Polaris Sensor Technologies公司[21]推出了Skypass系列产品,通过多帧图像合并处理,在理想条件下定向精度可达0.1°。国内对仿生偏振光导航的研究主要集中于清华大学[22]、北京理工大学[23]、北京航空航天大学[24]、北方工业大学[25]、哈尔滨工业大学[26]、西北工业大学[27]、海军舰艇学院[28]、中国科学技术大学[29]、南京理工大学[30]、苏州大学[31]、国防科技大学[32]、合肥工业大学[33]、大连理工大学[34]以及中北大学[35]等。
▼ 表 1 不同偏振导航方法比较▼ Table 1 Comparison of different polarization navigation methods
下面将从水下偏振光场出发,介绍水下仿生偏振光导航技术的发展现状。
2.1 水下偏振光场
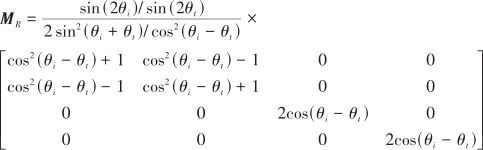
水下光场的偏振性质由于可以应用于导航、探测等各个领域而备受关注。19世纪,Fresnel 描述了光入射不同介质面的偏振特性,提出了菲涅尔公式。当折射面为空气-水面、入射光为大气散射光时,若以 、
、 分别表示入射光天顶角与折射光天顶角,则折射过程可描述为
分别表示入射光天顶角与折射光天顶角,则折射过程可描述为
 |
(2) |
式中, 为折射光的斯托克斯矢量;
为折射光的斯托克斯矢量; 为入射光的斯托克斯矢量;
为入射光的斯托克斯矢量; 为穆勒矩阵。
为穆勒矩阵。
此后,受Karl von Frisch研究的启发,人们开始对海洋环境以及200 m海底的电矢量进行测量,并得到了水下偏振光场的基本特征[36-39]。1974年, Timofeeva V A [40]在浑浊水域中探测到了40%以上的偏振强度。1989年,Kattawar G W等人[41]对水下偏振特性进行了数值模拟。1995年Horva ́th等人对水下折射偏振模式进行了详细分析[42]。2001年,Cronin T W等人[43]证实了在水下15 m处沿着任意视线方向,偏振角与太阳位置表现出简单的函数关系。2006年,Sabbah S等人[44]的试验证明由瑞利模型计算的偏振场与水下实际光场具有相关性。 若将空气与水的折射率用1与1.335表示,由折射定律,最大折射光天顶角近似等于48.5°。
 |
(4) |
图2展示了空气水面折射示意图。当太阳到达天顶或天空均匀地被厚云层覆盖时,电矢量方向在除去正对天顶的水底外均是水平的[45]。在晴朗天空条件下,水下电矢量方向随着太阳位置的改变而发生改变。
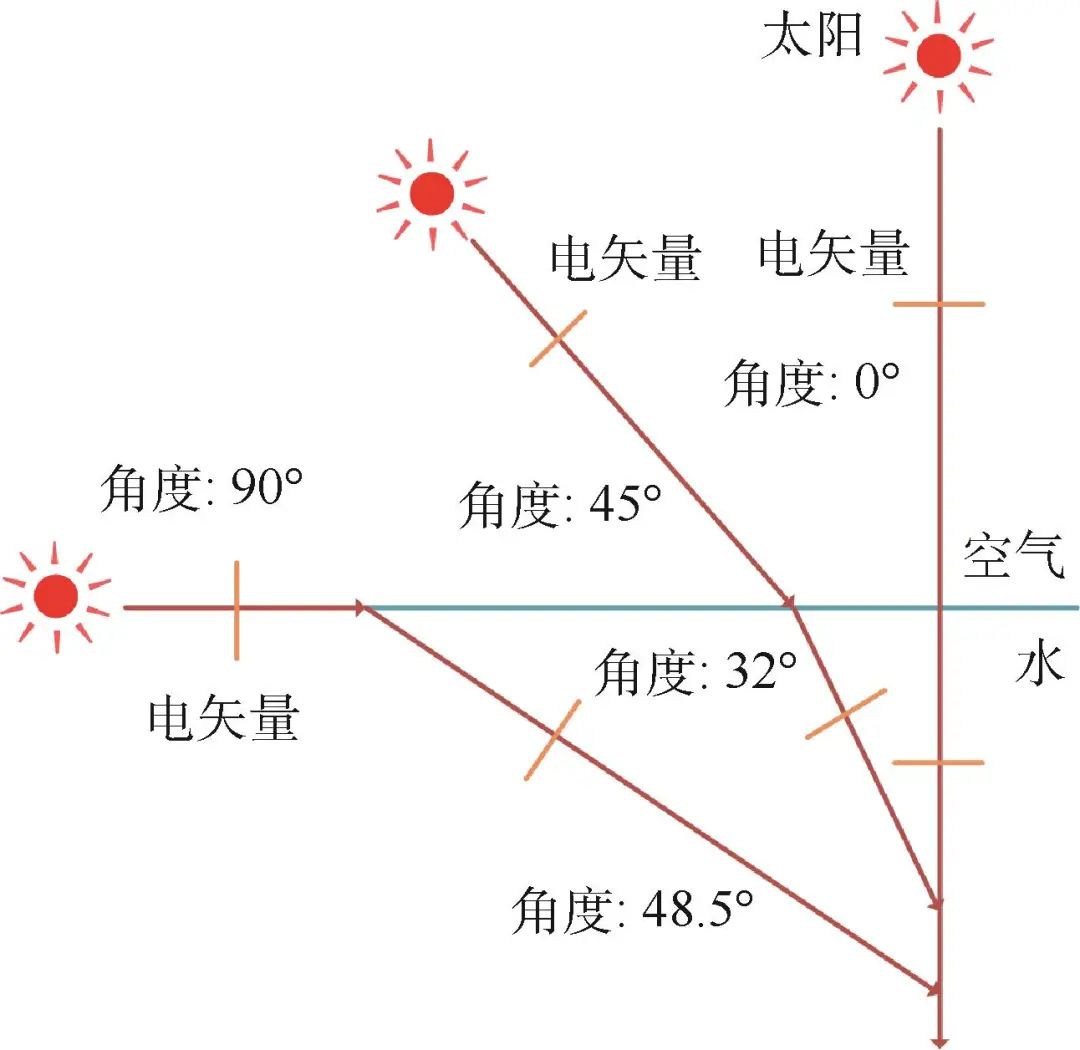
▲ 图2 空气水面折射示意图▲ Fig.2 Schematic diagram of air water refraction 需要指出的是,上述研究结果主要适用于非常清澈的海洋或是湖泊的前50 m,对于浑浊或是更深的区域,电矢量方向将逐渐接近水平。
2.2 仿生水下偏振光导航
尽管早在1954年Waterman就发现海洋中的光线大多都是线偏振的,但受限于实验设备等原因,利用水下偏振光进行导航的研究,于近年才逐渐开始。 2011年,Lerner A等人[46]证明了晴朗天空条件下水下偏振导航的可能性。同时,Voss等人[47-48]利用鱼眼镜头,精确测量了水下偏振模式,推动了水下光罗盘的理论研究与应用。同年,You Y等人[49]讨论了动态海洋表面下的偏振光场,建立了高动态水下偏振辐射模型。2018年,来自昆士兰大学的Powell S B等人[50]提出了基于水下偏振信息的定位方法,其精度达到了6 m/1 km,为远距离水下导航提供了新的可能性。2019年,Dupeyroux J等人[51]提出了紫外单像素点定向方法,并在清澈浅水区进行了偏振定向实验,实验结果同地面测量相仿。2020年,螳螂虾被证明利用头顶的偏振模式进行定向[52]。 在国内,大连理工大学于2019年[53]建立了水下单次瑞利散射偏振模型,2021年[54]研究了波长、水浊度、水成分等因素对水下大气偏振模式的影响,证明了大气偏振导航在不同水质条件下完成导航的可能性。2022年,北京航空航天大学[55]提出了一种基于斯内尔窗口的水下光罗盘太阳位置跟踪算法,太阳方位与天顶角的误差分别小于1.3°与0.3°,表明了水下光罗盘导航的巨大潜力。水下仿生偏振光导航研究进展情况如表2所示。
▼ 表 2 水下仿生偏振光导航研究进展▼ Table 2 Research progress of underwater polarized light navigation

综上可以发现,一方面,随着精密仪器技术的发展,当前的研究现状已经从水下偏振导航的可行性探索,逐渐转向了水下偏振导航测试。水下偏振导航的影响因素以及水下偏振导航方法正在蓬勃发展。另一方面,从水生生物导航技术的角度看,对水下生物偏振导航的机理研究也取得了一定的突破,为仿生水下偏振光导航提供了生物学上的参考。其发展趋势正逐渐向着深度结合水生生物的偏振导航机理的方向靠近,以期进一步提升水下偏振导航的鲁棒性与适用范围。
2.3 关键问题
总体而言,虽然对水下仿生偏振光导航技术的研究仍处于起步阶段,但这种导航方式已经在水下定位、定向以及太阳追踪等方面展现出巨大的潜力,它不受磁干扰、没有累计误差且计算量小,为水下导航提供了有趣的解决方案。因此开展面向水下应用的仿生偏振光导航技术研究是十分必要的。 值得注意的是,目前水下仿生偏振光导航只是试图将偏振模式作为指南针或定位装置。对于水下姿态测量的研究较为匮乏。此外,仍然存在着一些水下复杂环境适应性难题急需解决,主要包括: (1)受限于水下天窗偏振信息受水浊度与深度等因素的影响,现有的导航方式难以实现高浊度深水导航; (2)水下天窗偏振信息在水花的影响下会受到破坏等问题。
3 仿生地磁导航技术
生物的迁徙与觅食在很大程度上依赖于对地磁场的精确感知。磁场强度、磁倾角、磁偏角等信息能够帮助动物确定自身所在的位置并帮助动物完成导航[56-57]。 受生物地磁导航能力的启发,近些年仿生地磁导航作为一类新的导航方法被提出。这种导航方式可以被视为一种多目标实时搜索的问题[58-60]。简言之,仿生地磁导航区别于传统地磁导航技术,它并不需要先验地磁数据库。在已知目标位置的地磁参量值时,通过比较目标位置与当前位置的地磁参量来得到运动参数,如图3所示。
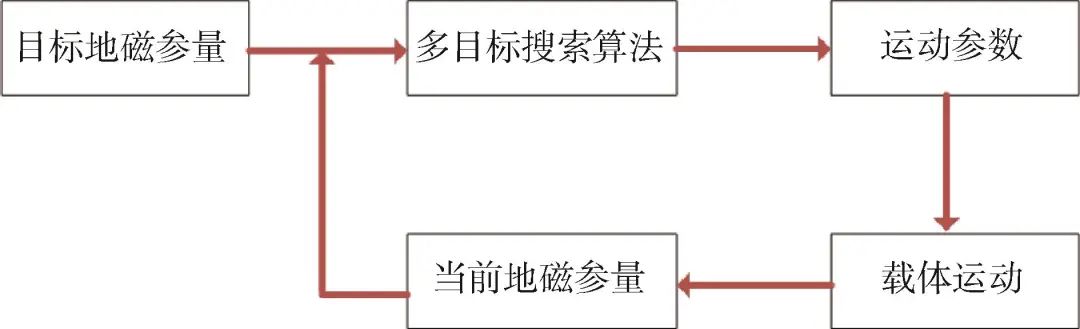
▲ 图3 仿生地磁导航示意图▲ Fig.3 Schematic diagram of biomimetic geomagnetic navigation 本节将以磁感知机理假说模型入手,对水下仿生地磁导航的研究现状进行分析。
3.1 磁感知机理
除了来自天空的自然线索外,地磁场也在许多迁徙动物的导航中起到了至关重要的作用。通常认为,夜间迁徙的鸣禽在远距离导航阶段依赖于磁场线索[61]。20世纪,利用地磁场进行导航的能力在候鸟身上得到了证实。此后,人们对生物的磁感知机理进行了大量的研究并提出了地磁感知假说模型,其中以电磁感应、磁铁矿受体以及自由基对假说模型为主要代表[62-66]。电磁感应假说模型认为电感与磁感之间具有密切联系,并在鳐鱼与鲨鱼的研究中得到了印证[67-69],但并不确定这些生物是否利用电导体,通过静态磁场时产生的电压作为磁感受器[70]。此外,对于陆生生物来讲,目前尚无关于此类假说的报道。这意味着生物,尤其对于陆生生物而言,似乎还存在另外的磁感知机理[71]。鸟类喙区的磁铁矿受体被认为也许能够感知磁场强度,而磁场的方向似乎可以利用眼睛中的自由基对来进行感知[72-73]。
需要指出的是,目前的主流观点认为,上述三种磁感知假说似乎并不是相互排斥的,自由基对与磁受体机制可能在几种生物中同时存在,并分别提供罗盘信息与地图信息[74-75]。 总体来看,尽管生物如何利用地磁场的信息进行导航没有定论,且仍不清楚生物如何在存在大量噪声源的情况下精确感知地磁场信息,但已经形成了部分被认为在物理上可行的假说,以及支持这些假说的相关证据。这为仿生地磁导航提供了生物上的理论模型参考。
3.2 水下仿生地磁导航
作为一种新兴的导航方式,水下仿生地磁导航越来越受到关注。通常认为部分生物能够利用磁罗盘与磁地图来确定方向与位置。并通过对磁场强度或磁场线倾角的感知,这类生物能够建立起一个基于地球磁场的生物版全球定位系统[76]。 2003年,多刺龙虾[77]被证明可以利用磁地图感知进行导航。2009年,Kato N 等人[78]受水生动物地磁辅助导航的启发,仿真验证了利用地磁信息进行导航的性能;2011年,Putman N F等人[58]发现海龟可以从地磁场中提取位置信息。2015年,Brothers J R等人[79]发现海洋生物如海龟等利用地磁线索定位筑巢海滩,并于2018年[80]从遗传学的角度为海龟的地磁导航提供了佐证,进一步推动了水下仿生地磁导航的研究。2019年,Lohmann K J等人[81]在鲑鱼中也发现了同海龟相似的地磁导航机制。
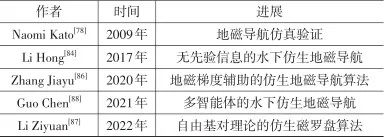
在国内,2014年,浙江大学[82-83]模拟了动物的长距离运动,此后于2016年提出了远距离仿生地磁导航方法,并进行了仿真验证。2017年,西北工业大学[84-85]提出了一种不使用任何先验信息的水下仿生地磁自主导航方法,仿真结果验证了算法的优越性。2019年,河海大学[59]发展了一种多智能体的水下仿生地磁导航算法,在磁异常干扰下获得了良好性能。2020年,东南大学[86]提出了一种地磁梯度辅助的水下仿生地磁导航算法,仿真结果表明,即使在部分磁异常区域该仿生导航算法也可以实现有效应用。2022年,哈尔滨工程大学[87]提出了一种基于自由基对理论的仿生磁罗盘算法,相较于传统的椭圆拟合算法,精度提升了30%以上。 水下仿生地磁导航研究进展情况如表3所示。可以看出,随着磁感知假说模型以及对水生生物地磁导航研究的不断深入,当前的水下仿生地磁导航技术已经可以通过结合磁感知假说模型来实现性能的提升,并且已经完成了仿真验证。近年来,该技术已经向着水下导航试验推进,并将为水下导航任务,特别是远距离导航任务,提供具有高度自主性、隐蔽性以及不产生累计误差的导航参数。
▼ 表 3 水下仿生地磁导航研究进展▼ Table 3 Research progress of underwater biomimetic geomagnetic navigation
3.3 关键问题
总的来说,国内外关于仿生地磁导航方法的研究目前主要处于生物导航机理探索以及仿真验证阶段,整体上研究还不够深入,距离真实水下环境中的应用仍有一段距离。 需要指出的是,除了要研究高磁敏感性的材料外,目前仿生地磁导航方法还有一些难题急需解决: (1)对于水生生物地磁导航的机理认识不足,现有方法无法准确构建水下生物地磁导航的模型; (2)水下地磁导航时容易受到磁异常干扰,现有方法在磁异常干扰下难以实现准确的位置测量。
4 仿生光磁复合导航技术
按照距离目的地的远近,生物的远距离迁徙可以被划分为远距离导航、归航以及最终目的地确定三个阶段。在不同的迁徙阶段,生物采用的导航手段并不完全相同,大脑的处理策略与行为有很大的差异。因此,在一段完整的远距离迁徙中,往往需要考虑多种导航线索。 单一的仿生偏振光导航或仿生地磁导航均难以同时获取准确鲁棒的全导航信息来完成导航任务。而应用多源信息的生物导航策略为我们提供了参考。模仿生物将多源信息进行复合处理,能够有效提升导航性能,图4展示了结合捷联惯导的仿生光磁复合导航示意图。
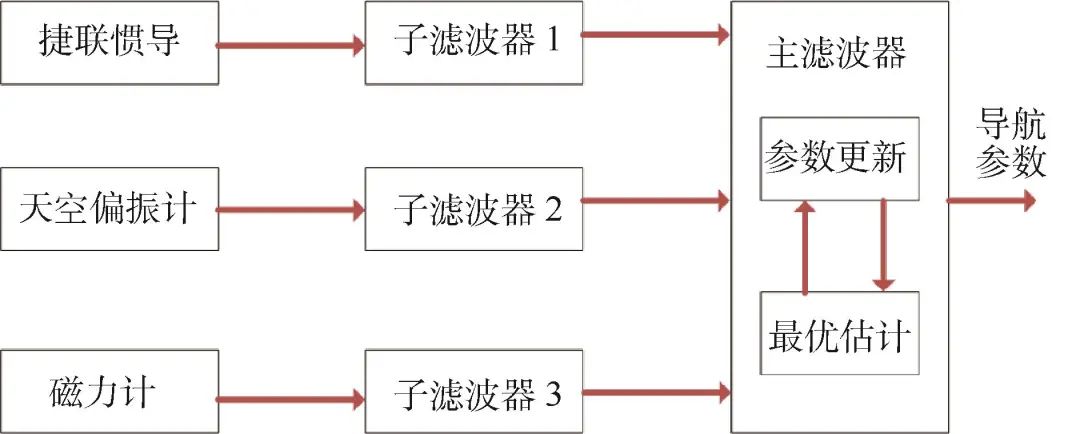
▲ 图4 仿生组合导航示意图▲ Fig.4 Schematic diagram of biomimetic integrated navigation 本节将从生物的光磁复合导航机理入手,重点关注仿生光磁复合导航技术,简述研究现状与未来发展方向。
4.1 光磁复合导航机理
地图信息与罗盘信息构成了生物导航的必备要素。对罗盘信息而言,当前对来自天空的信息与磁信息的优先级别仍然存在一定的争议。部分研究认为天空信息优先,地磁作为最后的导航手段[89]。另一些测试证明,在迁徙中,磁场作为鸟类的主要方向线索[90-92]。根据生物行为测试中的矛盾点,部分研究认为,天空线索与磁线索在生物的迁徙前与迁徙中似乎表现出不同的显著性,即迁徙前天空线索为主要参考,而在迁徙中磁线索会被优先考虑。同时,两者之间的反复校准可能取决于鸟类是否有一个完整的天空视野以及是否能在日落时分对天空进行观测[93]。 另一方面,已经证明磁场的倾角与强度可以被生物利用并作为地图线索来判断位置[94-95]。然而,天空信息,如太阳高度等,似乎并不被动物用来确定位置。尽管太阳高度角也可以提供位置信息,但鸟类和昆虫往往会忽略这些信息[96]。此外,鸟类及蝾螈等生物的偏振光接收与光依赖磁接收之间似乎具有一个共同的受体系统[97-98],这进一步为光磁复合导航提供了生物学上的证据。最近自由基对假说模型在视觉调制模式中对隐花色素 与
与 方向的研究,似乎展现出了与大气偏振模型中偏振角以及偏振度相似的特征[99]。 总之,当前研究表明,在鸟类的罗盘系统中,有必要在光磁信息之间进行校准。并且在校准时环绕天顶至少95°的天空信息需能够被生物观测,而非仅利用天顶区域附近的偏振光线索。对于地图系统而言,生物可以利用地磁信息来确定位置。
方向的研究,似乎展现出了与大气偏振模型中偏振角以及偏振度相似的特征[99]。 总之,当前研究表明,在鸟类的罗盘系统中,有必要在光磁信息之间进行校准。并且在校准时环绕天顶至少95°的天空信息需能够被生物观测,而非仅利用天顶区域附近的偏振光线索。对于地图系统而言,生物可以利用地磁信息来确定位置。
4.2 光磁复合导航
目前,普遍认为动物的长距离迁移往往依赖于多尺度和多感官的线索整合[100]。如候鸟被证明可以利用太阳及其相关的偏振光模式、恒星、地球磁场,以及空间线索记忆等方法来进行导航。仿生偏振光导航方法与地磁导航方法均有各自的优势以及劣势,将不同的导航方法进行组合并实现一体化的设计可以实现互补,并可有效增强仿生导航的精度与鲁棒性。 1993年,Able K P等人[101]发现候鸟利用偏振光信息矫正自身的磁罗盘。1996年,Frier H J等人[102]的实验证明,蜜蜂除利用天空线索外,还可以利用磁线索与视觉线索进行导航。2010年,Holland R A等人[103]发现夜行性哺乳动物鼠耳蝠同样可以利用偏振模式校准磁罗盘。2011年,Merlin C等人[104]初步揭示了昆虫使用时间补偿的偏振罗盘、地磁或夜空进行迁徙的策略。
2013年,Dacke M等人[105]发现非洲滚球蜣螂整合太阳、月亮、天空偏振模式以及地磁等信息进行导航。2018年,Fleischmann P N等人[106]发现沙蚁不仅利用偏振光、路径积分、地标导航,还可以利用地磁场作为指南针线索。2019年,Lindecke O等人[107]首次证明迁徙蝙蝠利用日落时的偏振罗盘矫正指南针系统。2020年,Wehner R等人[108]发现沙蚁将偏振、视觉、地磁、嗅觉、触觉等信息结合进行导航。
2022年,Giuseppe B等人[109]发现迁徙的鸣禽可能采用身体对准的方式整合来自天体和磁场的方向线索。2023年,Tonelli B A等人[110]提供了宏观生态学证据,表明了鸟类普遍依赖有利的太阳和磁场条件来准确迁移。 国内,2009年,合肥工业大学[111]设计了一种偏振光、地磁与GPS组合导航的实验平台。2015年,大连理工大学[112]提出了一种融合偏振光以及地磁场的定位方法,验证了光磁复合的可行性。2018年,西北工业大学[113]提出了一种利用偏振光与地磁确定近地轨道微卫星姿态的方法。2019年,国防科技大学[114]提出了一种偏振光、地磁、惯性的组合导航方法,提高了导航系统的环境适用能力。
2021年,北京航空航天大学[115]提出了一种基于观测度的自适应联邦滤波算法,提高了惯性、偏振光、地磁组合导航的可靠性;并于2022年[116]提出了一种应用于远洋航行的捷联惯导、仿生偏振光、地磁的组合导航方法;2022年,扬州大学[117]讨论了捷联惯导、GPS、偏振光以及地磁组合导航系统的飞行对准问题,有效提升了组合导航性能。同年,北方工业大学[118]提出了一种基于深度Q学习网络的陀螺仪、加速度计、偏振光以及磁力计的组合导航方法,提高了姿态估计精度。之后,中北大学[119]建立了一种基于优化三轴姿态算法的偏振光地磁导航组合定姿模型。仿生光磁复合导航方法对比如表4所示。
▼ 表 4 仿生光磁复合导航方法对比▼ Table 4 Comparison of biomimetic polarization and geomagnetic composite navigation methods
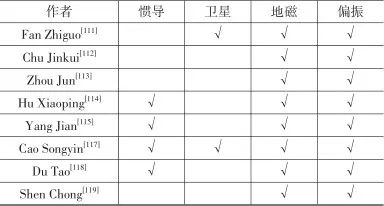
总的来讲,当前的研究集中于生物的多源导航策略以及仿生多源导航信息策略的初步验证阶段。导航范围已经从地面或近地面导航拓展至航天[113]与航海[116]。目前生物如何整合多种导航信息的机理仍不清楚,这些线索的相互作用以及重要性关系仍然是研究的热点。未来,对于仅使用光磁复合的导航方法而言,利用偏振光信息矫正磁罗盘信息为主要的研究方向。而在多传感器融合的导航方法中,主要以惯性导航为核心展开研究,其研究热点为如何利用仿生光磁信息提升组合导航性能。
4.3 关键问题
综上,国内外对于光磁等导航线索相互作用的导航机理研究较浅,仍然存在许多争论,在导航方法上处于初探阶段,同样有待进一步深入研究。 此外,受限于水下仿生偏振光导航与水下仿生地磁导航技术的研究现状,当前水下仿生多源导航信息处理技术还未进行系统研究。关于水下仿生光磁复合导航的研究开展得较少,主要存在的难点与问题为:水下环境恶劣,光磁复合导航受干扰严重,现有地面或近地面的仿生光磁复合导航方法难以直接应用于水下导航之中等。 但毋庸置疑的是,根据生物的导航技术特点,水下仿生光磁复合导航必将成为未来水下仿生导航的一大热点方向。
5 发展趋势
(1)浑浊水域/深水的偏振探测与仿生导航。当前,水下偏振导航的研究局限于浅水或清澈水域,当AUV航行至深水或浑浊水域时,仿生偏振导航将失效,导航结果会变得不再可信。因此,突破水下能见度限制,实现浑浊水域/深水的仿生偏振探测与导航解算,将能够有效扩展仿生偏振导航的应用范围。 (2)水花/波浪等复杂环境下的高鲁棒、高精度水下偏振导航。水下导航资源受限,天空偏振信息会耦合来自水花/波浪等复杂环境带来的量测噪声。现有的方法存在算法复杂度高、补偿效果不理想等问题,因此,水下复杂环境中的高鲁棒、高精度偏振导航方法急需深入研究。 (3)水生生物的磁感机制与导航原理。当前的研究表明,水生生物同陆生生物的磁感机制似乎存在不同,并且这一磁感知机制可能并不单一。
探明水生生物如何完成磁信息感知与导航将为仿生磁导航技术提供进一步的生物学参考,并有望实现水下仿生磁导航的技术突破。 (4)水下磁异常干扰的仿生地磁导航。水下环境复杂,地壳中磁性物质的分布不规律、强度不均匀引起的地磁异常可能导致仿生地磁导航方法的失效。尽管当前对水下磁异常下的仿生导航方法进行了一定的研究,但仍然存在算法复杂度较高等问题。因此,对磁异常干扰下的仿生地磁导航技术的研究将有望提升仿生地磁导航技术的鲁棒性。
(5)水下仿生偏振光罗盘与磁罗盘的信息矫正策略。生物的光磁罗盘信息矫正为水下仿生光磁复合导航提供了新的研究思路,并将实现信息互补,有望提升水下仿生导航的定向精度。 (6)水下仿生光磁复合导航方法。水下环境复杂,单一导航手段容易受到干扰。模仿生物的复合导航策略,研究融合多种感知手段的仿生光磁复合导航技术至关重要,将能够有效提升水下航行的自主性,并拓宽水下航行范围。
6 结 论
受生物让人惊叹的导航能力的启发,仿生导航技术在近些年受到了广泛的关注与研究,并从地面或近地面的研究转向了更加复杂的水下环境。本文对仿生光磁导航技术进行了回顾,重点关注了水下仿生偏振光导航、水下仿生地磁导航以及光磁复合导航技术的研究现状与关键问题,并对未来的发展趋势进行了展望。水生生物简洁高效的导航技术,使得当前的水下仿生导航技术被寄予厚望,以期补偿现有导航手段的不足,并完成全自主、高鲁棒的水下导航任务。
审核编辑:黄飞
-
TPMS技术与发展趋势2009-10-06 0
-
GPS导航定位位置跟踪技术末来发展趋势浅析2009-10-20 0
-
广电业务发展趋势与业务捆绑技术2010-04-23 0
-
磁传感器未来发展趋势特点分析2012-09-21 0
-
【转】消费类电子无线充电发展趋势探讨2019-01-03 0
-
蓝牙技术未来的发展趋势2019-03-29 0
-
新兴的半导体技术发展趋势2019-07-24 0
-
汽车电子技术的发展趋势是什么?2021-05-17 0
-
电子技术在现代汽车上的应用及发展趋势是什么2021-05-17 0
-
车内信息通信测试技术的发展趋势是什么?2021-05-17 0
-
无线技术的下一波发展趋势是什么?2021-05-26 0
-
高速球是什么?有什么技术发展趋势?2021-05-31 0
-
探讨智能视频分析技术的应用现状与发展趋势2021-06-03 0
-
伺服系统的发展趋势是怎样的?2021-09-30 0
-
通过最终显示背板技术探讨LED发展趋势2019-07-04 3030
全部0条评论

快来发表一下你的评论吧 !
