

Fidelity Pointwise中的自动自适应网格加密功能介绍
描述
仿真前处理的目标是创建适合所需分析的网格。在生成同时解析几何和物理问题的网格时,我们的目标是提高计算效率。根据仿真预期,我们可以在预计会出现较小流动特征的特定区域加密网格。下图中,车辆周围添加了加密区域,因为我们预计会有大量值得关注的物理现象,尤其是在尾流区域。这一过程需要大量的专业领域知识,并依赖于用户的输入。在流动物理特性极少的区域过度加密网格会增加计算成本和仿真时间,这不是我们想要的。
本文将详细介绍 Fidelity Pointwise 中的自动自适应网格加密功能,该功能可管理数值误差并依据用户定义的边界,同时解析各种应用中的所有流动特征。
网格自适应有哪些需求?
合适的网格应具备如下特性:
● 符合底层 CAD 几何结构
● 保持局部各项异性的边界层的网格
● 加密显著和细微流动特征
在自适应网格加密过程中,我们希望保留边界层和近壁区的物理特征,网格单元尺寸平滑渐变,以确保求解收敛。在自适应网格加密过程中,有必要定义一个自适应传感器,以描述需要额外加密的区域。在飞行器外流仿真中,可以选择马赫数作为自适应变量;而在叶轮机械应用中,速度则更合适。
用 Fidelity Pointwise
实现自适应网格加密
在 Fidelity Pointwise 中首先创建基准网格以启动自适应网格加密,然后基于基准网格进行求解。传感器会在每个边缘评估自适应变量,如果某个位置超出了特定阈值,则会被标记为自适应。之后,根据标记点的位置和该区域新的目标网格大小创建点云,并将该点云整合到 Fidelity Pointwise 的基准网格,生成更新后的网格。这个过程会反复进行,直到求解方案不再随着网格的变化而变化。
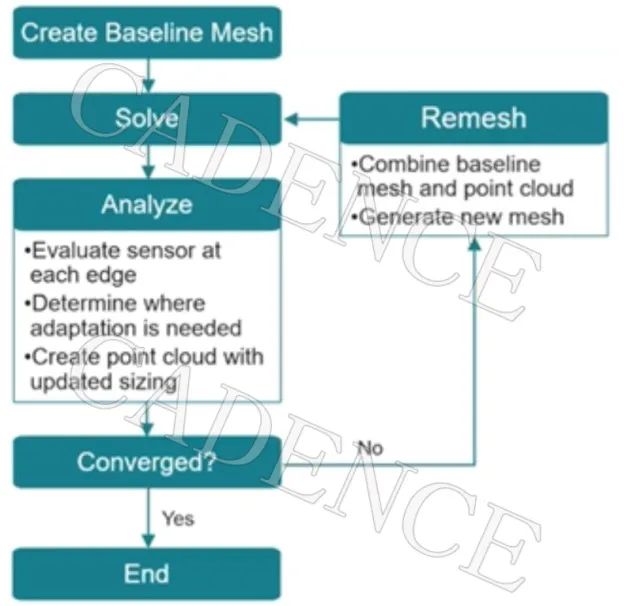
Fidelity Pointwise 的网格自适应循环
应用测试案例
冲击射流
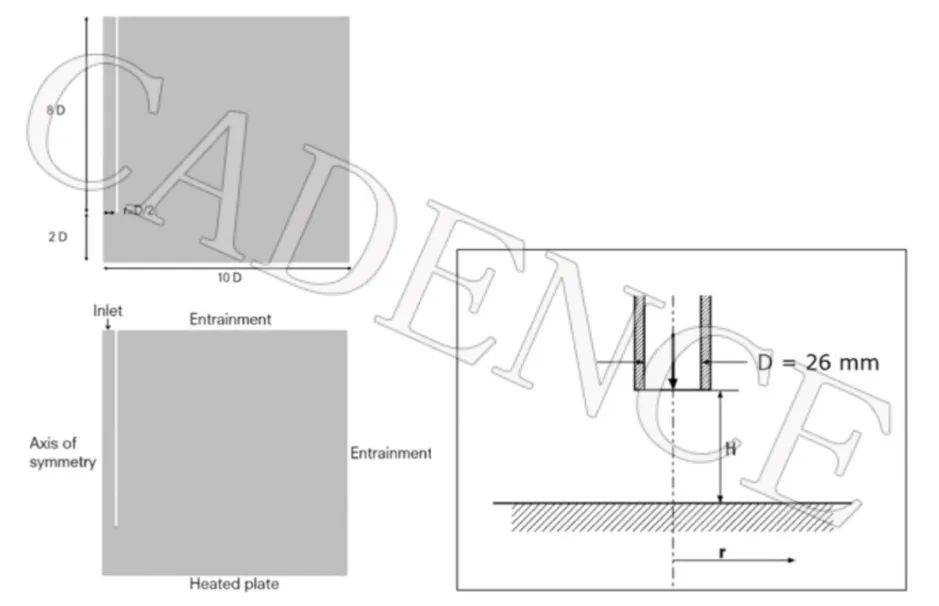
冲击射流的边界条件
上图中,冷射流下沉到热板,边界条件如图所示。
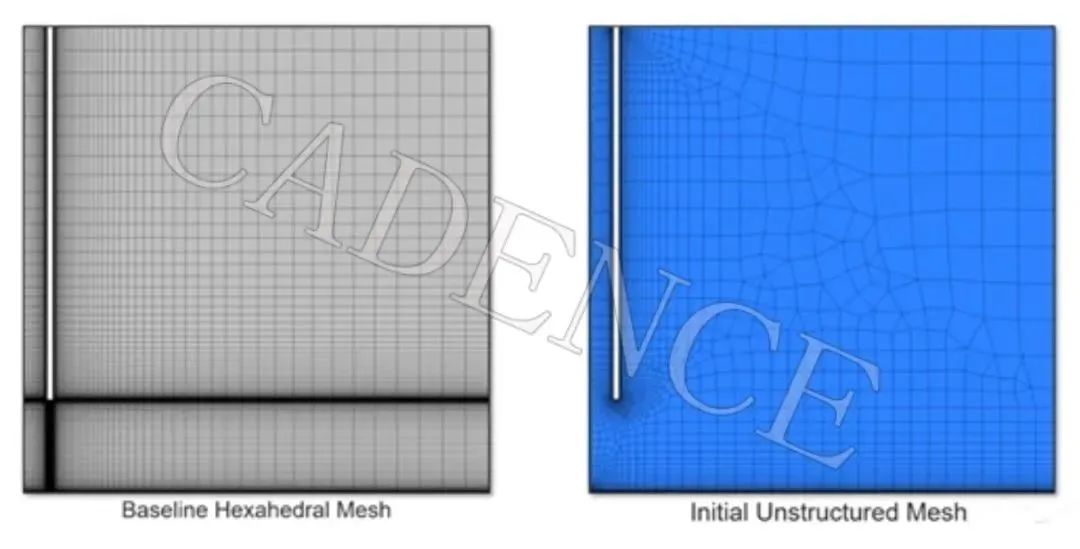
基准网格(左),初始网格(右)
这样做的目的是比较完全结构化的网格和自适应后的网格。上图中,左边图片显示的是基准六面体网格,右边图片显示的是根据速度大小进行自适应的初始非结构化网格。
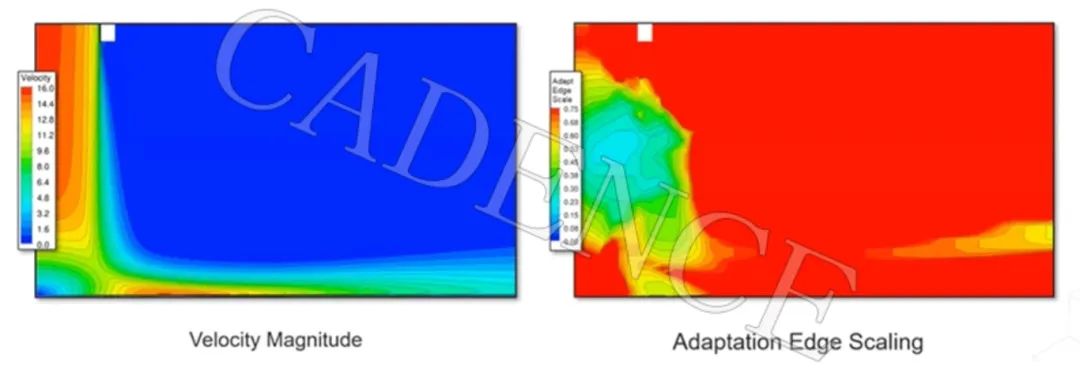
速度大小(左)
和自适应边缘比例(右)的等值线
右图显示了当前边缘通道所需的缩放比例。自适应过程的重点是喷流和挡板之间的区域。在基于求解方案创建的点云中,25% 的节点超过了阈值,因此将进行相应调整。
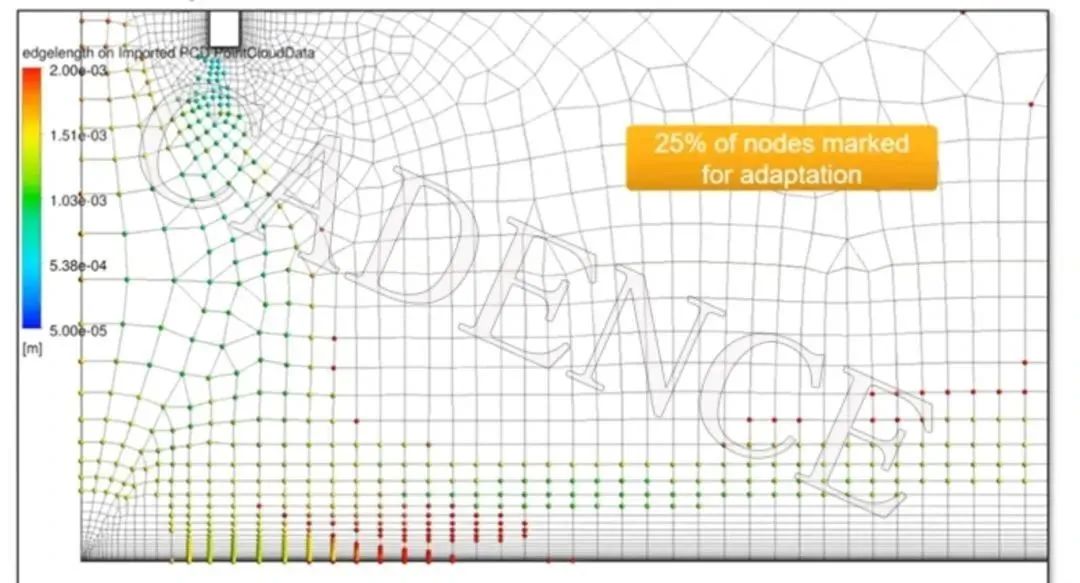
初始点云,标注 25% 的节点进行自适应处理
在第五次循环中,约 70% 的节点被标记为自适应;而在最后一个循环中,94% 的节点被标记为自适应。一旦约 90% 的节点被标记为自适应,就可认为达到收敛,即可视为很好的迭代停止点。
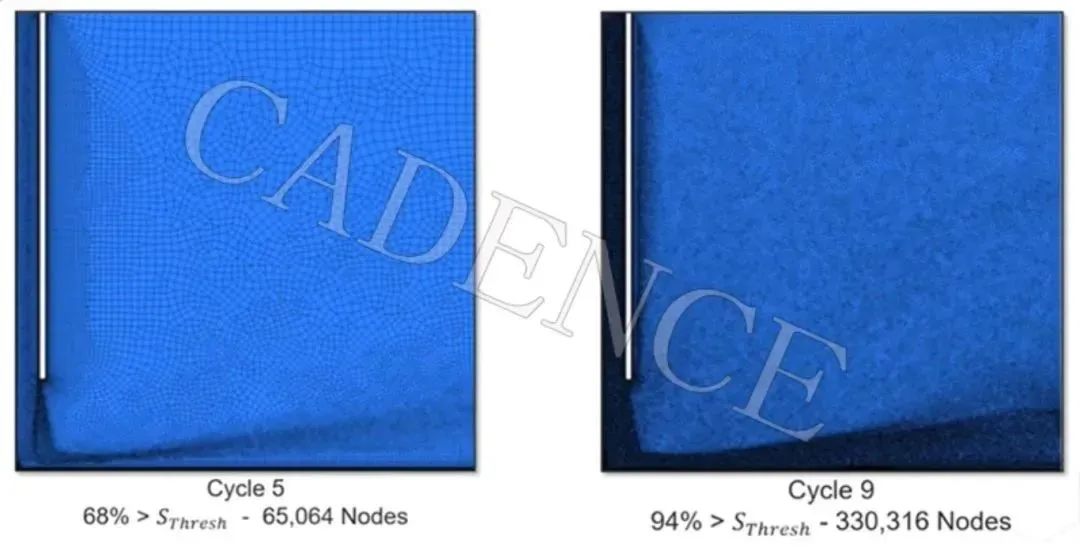
5th 循环(左)和 9th 循环(右)的自适应网格
检查网格统计数据后发现,自适应后的网格比高度加密的六边形网格节点和单元数更少。放大撞击区域后发现,初始网格并没有准确捕捉到物理特性。然而,网格在每个循环中都有所改善,最终更接近实验数据。
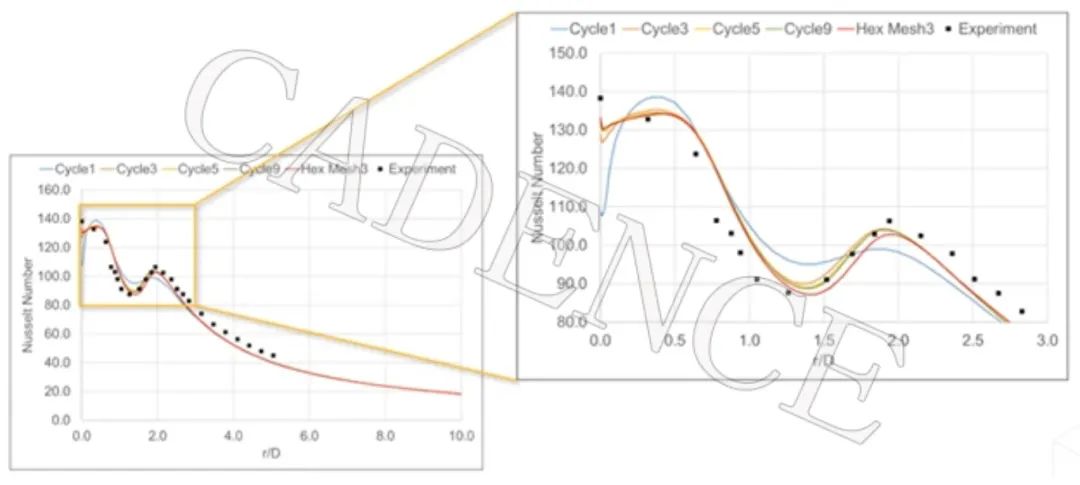 每个自适应循环中
每个自适应循环中
努塞尔数(Nu)都会更接近实验 Nu 值
轴流涡轮叶片
亚琛涡轮机
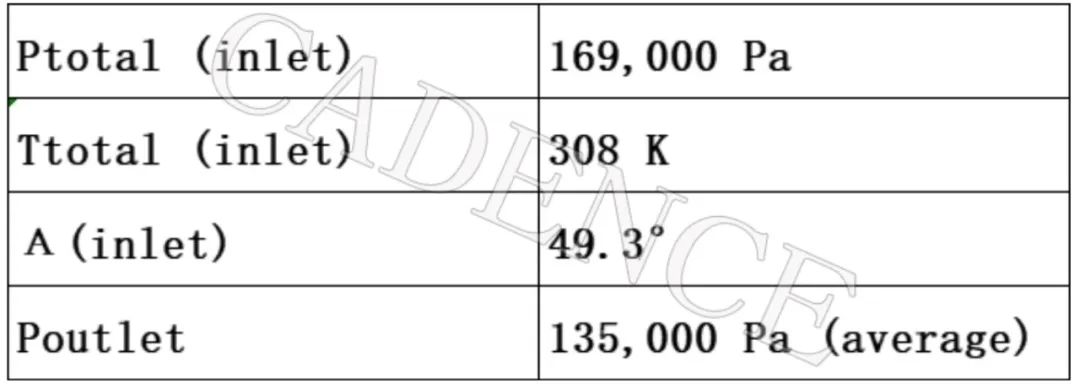
本测试案例采用亚琛涡轮机,共 41 个叶片,转速 3500 RPM。入口和出口流量如下:
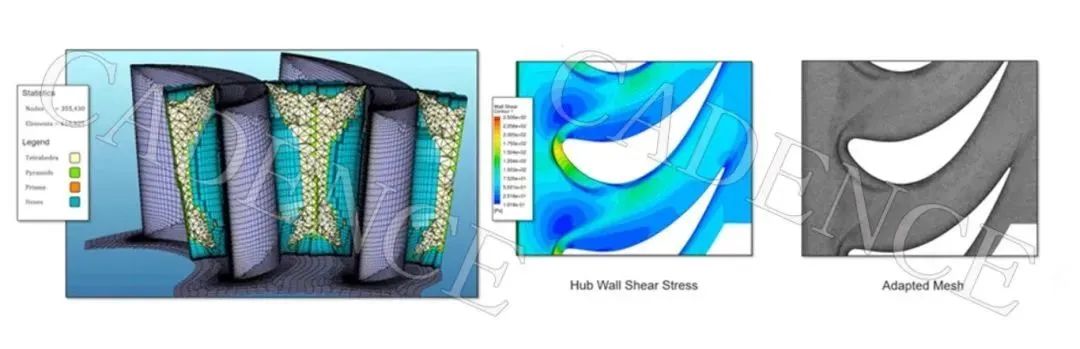
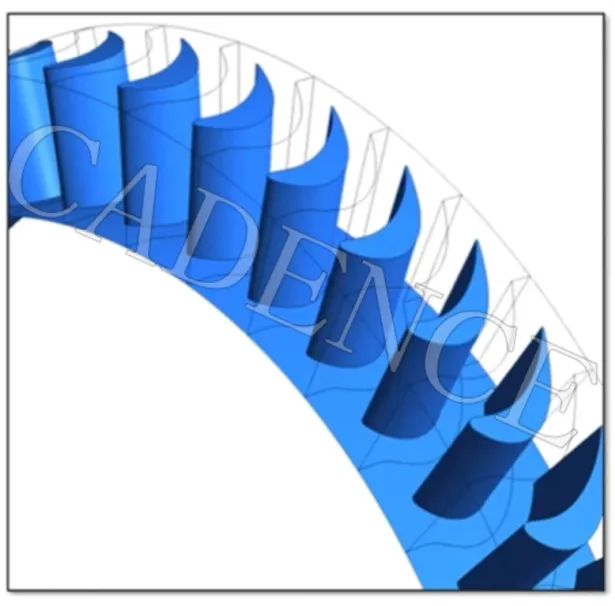
初始自适应网格(左)
最终自适应网格 ——叶片域断面(右)
这里同样用速度作为自适应变量。调整后的网格中,气流冲击清晰可见。同时,最终调整后的网格准确反映了二次涡和气流冲击。
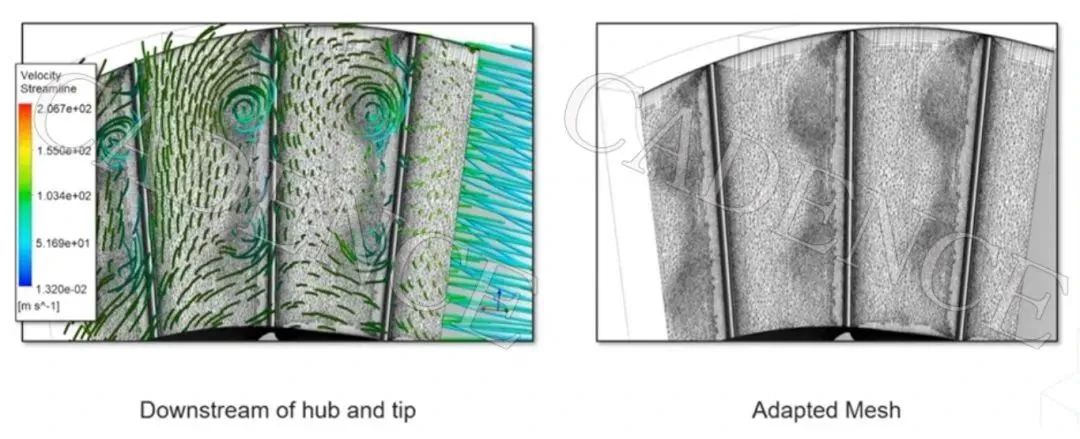
调整后网格捕捉到的二次涡
DrivAer 模型
自适应网格加密技术也可应用于汽车领域,这里将 DrivAer 模型作为测试案例。该试验中,仍然以速度作为自适应变量。DrivAer 模型的 RANS 仿真使用了 SST 两方程湍流模型。自适应网格和尾流区的流线如下所示,显示了对涡流的良好匹配和准确捕捉。
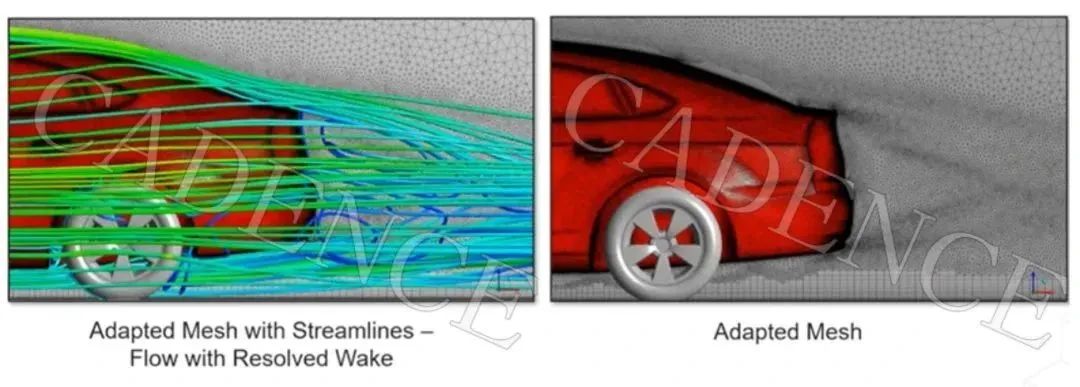
DrivAer 模型的自适应网格
外流空气动力学
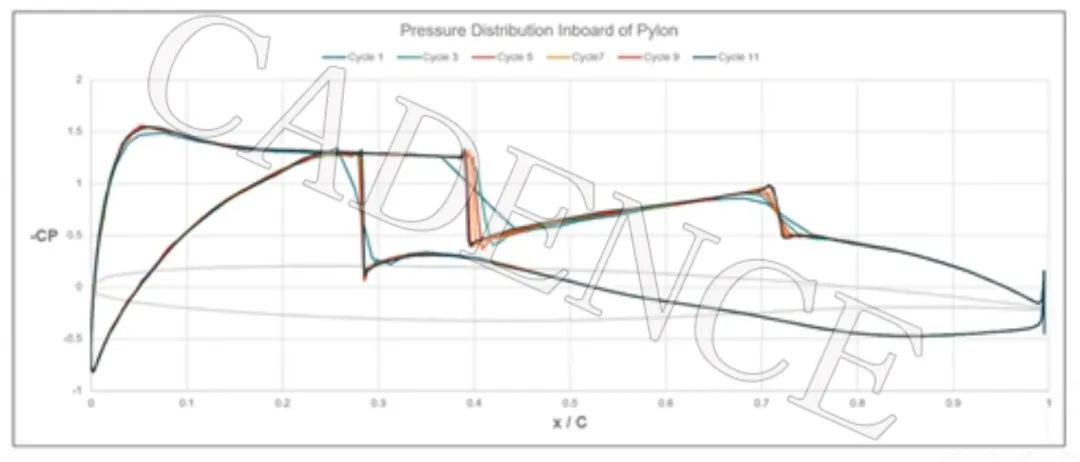
本测试案例采用第二次美国航空航天协会(AIAA)阻力预测研讨会上的 DLR F6 模型。马赫数为 0.75,攻角为 1°。这里的自适应变量是马赫数。通过自适应网格加密,机翼顶部的冲击波清晰可见。初始表面压力和自适应后的表面压力如下图所示。每次自适应循环后,冲击波都会变得更加清晰。
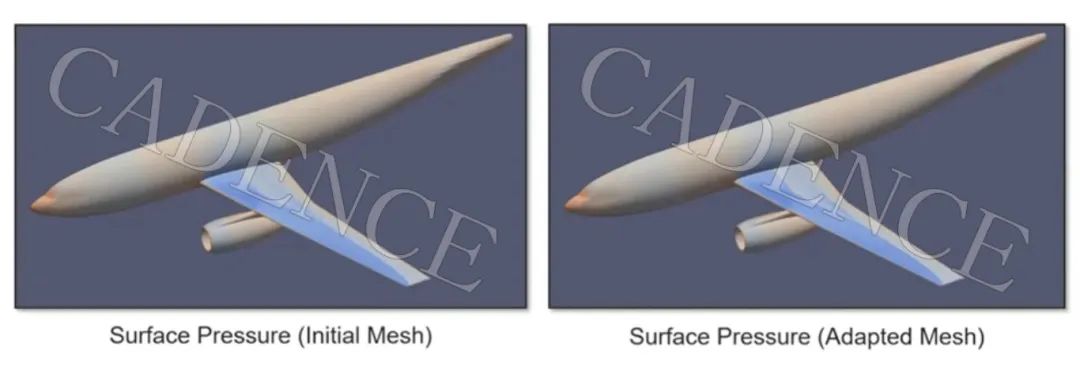
初始网格(左)和自适应后
网格(右)的表面压力
通过观察升力和阻力系数可以发现,每循环一次,网格加密就会变得更加精确。这种网格自适应方法可以很容易地集成到任何工作流程中。
虽然最初需要花费一些精力进行设置,但一旦设置完成,用户就可以彻底解放。在自适应循环中,拓扑结构会保持一致,因为每次循环都会返回基准网格。
自适应循环中的升力和阻力系数
审核编辑:刘清
-
基于AccelDSP的自适应滤波器设计2010-04-24 0
-
【新功能】媒体处理MPS全新支持自适应多码率、多语言音轨2018-04-25 0
-
自适应数字传感器设计2018-11-08 0
-
ADB自适应远光灯系统的特性和功能2020-12-29 0
-
HarmonyOS/OpenHarmony应用开发-ArkTS自适应线性布局自适应拉伸实现2023-02-21 0
-
两关节机械手的自适应控制介绍2023-09-21 0
-
LabVIEW开发自适应降噪ANC2023-11-30 0
-
树型网格计算环境下的自适应任务调度算法2009-04-17 467
-
自适应滤波算法2016-01-15 757
-
自动变步长BLMS自适应均衡的优化实现2017-01-07 513
-
为什么矩形自适应网格是先进技术?2018-10-18 544
-
激光跟踪自适应焊接技术介绍2022-11-11 595
-
如何从线性网格创建高阶网格2023-07-12 316
-
基于LBM的网格自适应划分代码实现2023-08-10 217
-
直播就在明天!Fidelity 风机高质量网格仿真一体化解决方案——Cadence CFD 极速前处理2023-10-24 243
全部0条评论

快来发表一下你的评论吧 !
