

什么是协作机器人?为什么使用协作机器人?
机器人
描述
协作机器人 (cobot) 是可以无需传统的安全防护围栏而让工作人员直接与其交互并一起工作的机器人。工作人员与协作机器人直接交互的优势在于:
安全执行复杂任务
高生产质量
直观和用户友好的协作机器人教学和编程
协作机器人,或“智能辅助设备”,的概念出现在汽车行业的研究工程和公司中。在这些场景中,工作人员会直接与控制协作机器人互动并控制其为移动重物提供动力。这些系统可确保协作机器人的辅助功能的安全使用。协作机器人逐渐获得了长足发展,可以执行以下任务:
取放物品
质量检测
最终装配与涂装
使用 MATLAB 的智能箱内取物协作机器人。
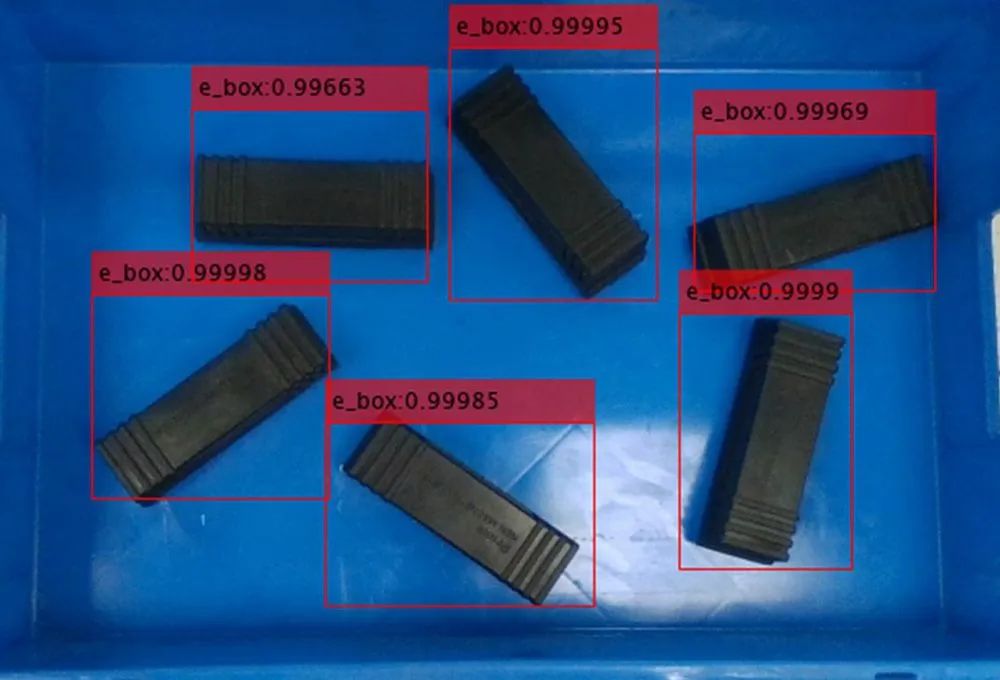
使用 YOLO 进行目标检测。
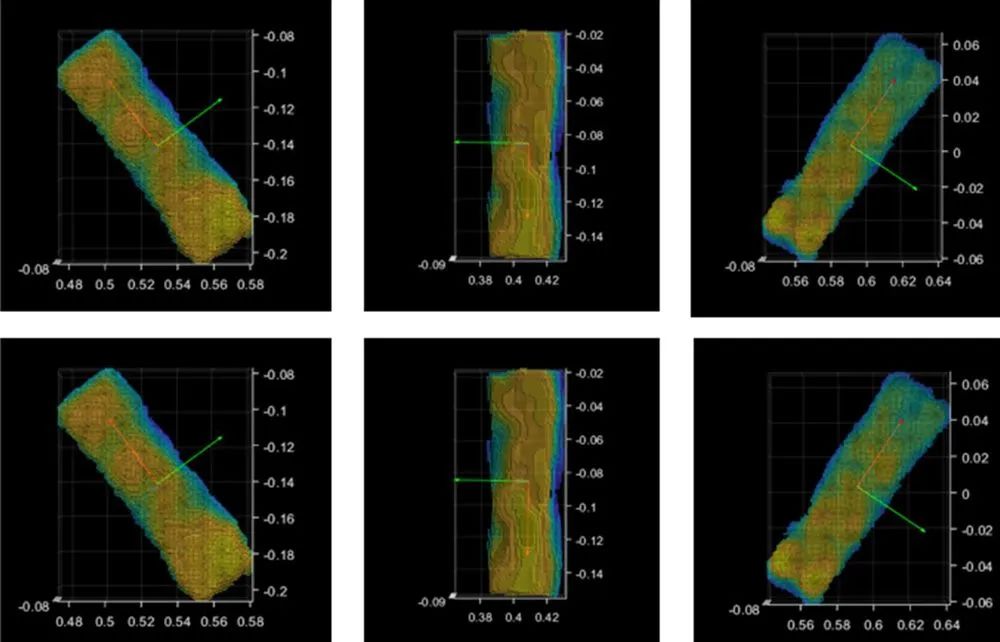
目标位姿估计。
为什么使用协作机器人? 在传统工业自动化中,机器人不能与人体接触,这种隔离可在不对操作人员造成身体伤害的前提下确保功能可靠。在这些系统中,机器人在完全没有工作人员的区域或笼子内工作。 灵活的自动化 将机器人束缚在笼子内会限制其能力的发挥。当前市场要求缩短交付周期和大规模自定义。这些要求激发了对支持工作人员和机器人的协作且不会危及工作人员的灵活和多用途制造系统的兴趣。在灵活的协作性自动化中,协作机器人通过力量、精度和数据分析能力增强和提升人的能力,从而为协作机器人的最终用户贡献更多价值。协作机器人开发的目标是:
共存 - 与工作人员共享工作区以优化过程
协作 - 通过人工参与灵活地实现各种任务自动化
安全系统 防护围栏为机器人的广泛应用带来了技术障碍。协作机器人通过固有的、支持协作机器人与其工作区中的目标之间安全交互的安全设计来满足安全需求(例如 ISO 10218-1 标准)。协作机器人可减少潜在碰撞中暴露的惯性,并包含合规组件(如关节扭矩传感器)以吸收不需要的冲击带来的能量。此外,协作机器人开发人员会采用各种外部传感器(例如,摄像头、激光传感器、深度传感器等)并融合所采集的数据,以实现对工作人员与机器人之间的距离和手势的可靠识别。 高级算法和 AI 在协作机器人编程中的应用 协作机器人应用与技术的差距阻碍了协作机器人的全面部署。协作机器人需要高级算法来实现其在高混合、小批量生产环境中的巨大制造潜力。协作机器人必须能够通过使用深度学习感知环境以在不熟悉且没有明确指令的情况下执行任务。协作机器人(cobot)的运动规划器支持协作机器人(cobot)达到目标位置,避障算法让其能够在动态环境中做出反应行为。这些都是建立在协作机器人移动时传感器提供的局部知识上的。
审核编辑:黄飞
-
TB6-R10协作机器人 碰撞测试——深圳泰科智能机器人#六轴协作机器人#协作机器人#碰撞测试#关节模组深圳市泰科智能机器人有限公司 2023-04-17
-
与双臂协作机器人打太极 - 泰科机器人 #柔性机器人 #双臂协作机器人 #协作机器人 #双臂机器人 #定制深圳市泰科智能机器人有限公司 2023-12-01
-
机器人VS人:替代还是协作?2018-09-20 0
-
如果有一台AI机器人,你希望它每天帮你做哪些事?2018-10-23 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
协作型机器人的应用类型2020-12-01 0
-
FANUC两款新品SCARA机器人:丰富了其小型机器人产品类型,提升了市场竞争力2018-09-29 1912
-
协作机器人的起源_为什么需要协作机器人2019-07-07 7947
-
协作机器人是什么_协作机器人应用前景2020-08-18 4757
-
协作机器人与传统机器人有什么区别2022-11-30 1848
-
什么是协作机器人?协作机器人如何选择2020-12-29 6590
-
协作机器人-功率和力限制2023-02-03 1579
-
何为协作机器人?协作机器人具体应用2023-04-25 417
-
复合机器人优势尽显,发展空间无限!2022-02-20 756
-
一文读懂:为什么碰撞检测是协作机器人的底层技术2023-12-06 407
全部0条评论

快来发表一下你的评论吧 !
