

动态自动驾驶数据量身定制的NeRF:NeuRAD
MEMS/传感技术
描述
1. 写在前面
今天笔者为大家分享一篇针对动态自动驾驶数据量身定制的NeRF:NeuRAD。具有简单的网络设计,并且针对相机和激光雷达的广泛传感器建模。
下面一起来阅读一下这项工作~
2. 摘要
神经辐射场( NeRFs )在自动驾驶( AD )社区中得到了广泛的应用。最近的方法显示了NeRFs在闭环仿真、AD系统测试以及作为先进的训练数据增强技术方面的潜力。然而,现有的方法往往需要较长的训练时间,密集的语义监督,或者缺乏泛化性。这反过来又阻碍了NeRFs在AD中的规模化应用。在本文中,我们提出了一种针对动态AD数据的鲁棒的新颖视图合成方法NeuRAD。我们的方法具有简单的网络设计,对相机和激光雷达广泛的传感器建模- -包括卷帘快门、光束发散和光线投射- -并且适用于盒子外的多个数据集。我们在五个流行的AD数据集上验证了其性能,达到了目前最先进的性能。为鼓励进一步开发,我们将公开发布NeuRAD源代码。
3. 效果展示
NeuRAD是一种为动态汽车场景量身定制的神经渲染方法。通过它,可以改变自车和其他道路使用者的姿态,以及自由添加和/或删除行动者。这些能力使得NeuRAD适合作为组件的基础,例如传感器逼真的闭环仿真器或强大的数据增强引擎。
4. 具体原理是什么?
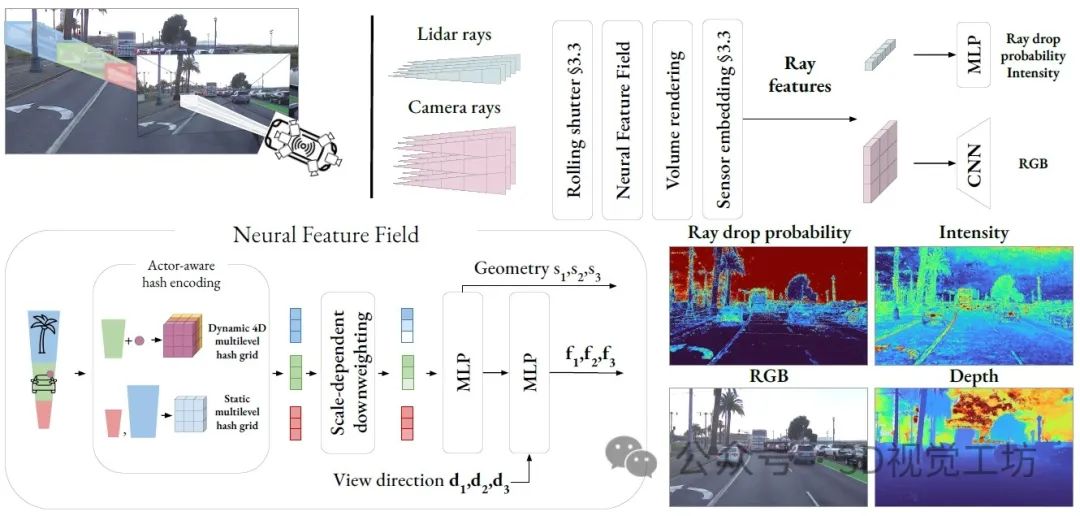
NeuRAD为汽车场景的静力学和动力学学习一个联合神经特征场,其中两者仅由行动者感知哈希编码识别。落在执行器包围盒内的点被转换为执行器-局部坐标,并与执行器索引一起用于查询4D哈希网格。之后使用上采样CNN将体渲染的射线级特征解码为RGB值,并使用MLPs解码为射线下降概率和强度。
5. 和其他SOTA方法对比如何?
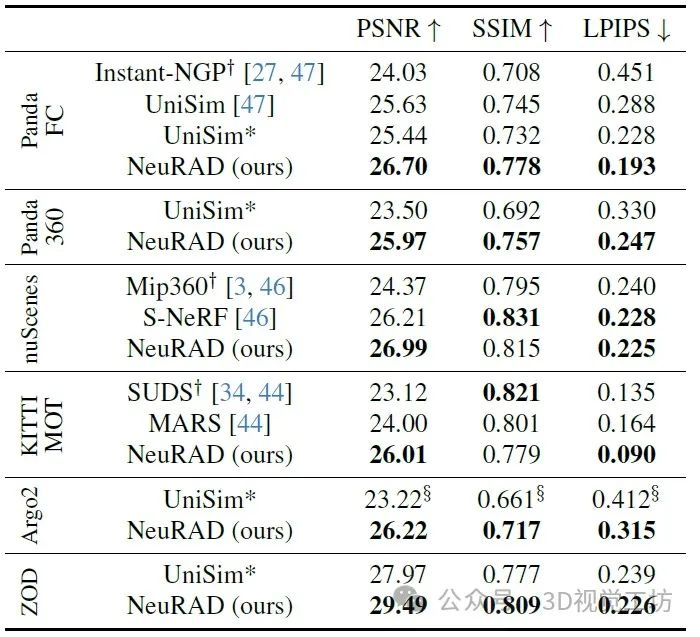
在五个数据集上与SOTA方法进行图像新视角合成性能比较。
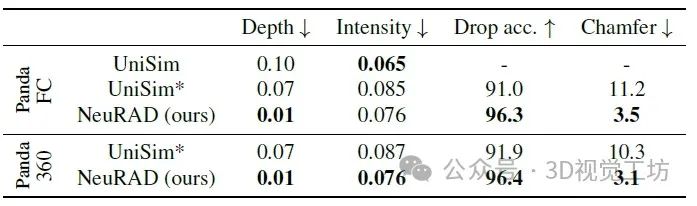
Lidar新视角合成性能与SOTA方法的比较。
6. 总结
这篇文章提出了一种专门为动态自动驾驶( AD )数据量身定制的神经模拟器NeuRAD。该模型在360 °中联合处理激光雷达和相机数据,并将世界分解为静态和动态元素,允许创建真实世界驾驶场景的传感器可编辑克隆。NeuRAD融合了各种传感器现象的新颖建模,包括光束发散、光线下降和卷帘快门,提高了新视图合成的质量。
审核编辑:黄飞
-
【mBot申请】自动驾驶车2015-11-30 0
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 0
-
自动驾驶真的会来吗?2016-07-21 0
-
自动驾驶的到来2017-06-08 0
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 0
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 0
-
车联网对自动驾驶的影响2019-03-19 0
-
如何让自动驾驶更加安全?2019-05-13 0
-
自动驾驶汽车的处理能力怎么样?2019-08-07 0
-
联网安全接受度成自动驾驶的关键2020-08-26 0
-
如何保证自动驾驶的安全?2020-10-22 0
-
网联化自动驾驶的含义及发展方向2021-01-12 0
-
边缘计算在自动驾驶汽车的应用2021-07-12 0
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 0
-
自动驾驶技术的实现2021-09-03 0
全部0条评论

快来发表一下你的评论吧 !
