

EtherCAT和ethernet通信协议的区别
通信网络
描述
EtherCAT(以太网控制自动化技术)是一种用于确定性以太网的高性能工业通信协议,它扩展了IEEE 802.3以太网标准,使得数据传输中具有可预测性定时及高精度同步等特点。这个开放性标准作为IEC 61158的组成部分,常用于机械设计及运动控制等应用中。
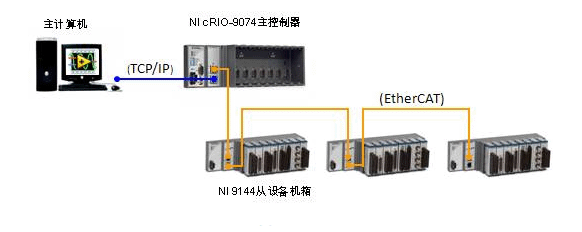
EtherCAT在标准的以太网电缆上应用主/从式的构架。美国国家仪器公司的EtherCAT主设备由带有两个以太网端口的实时控制器构成,如NI CompactRIO及PXI。每个NI从设备同样包含两个端口,允许以菊花链模式与主控制器连接。
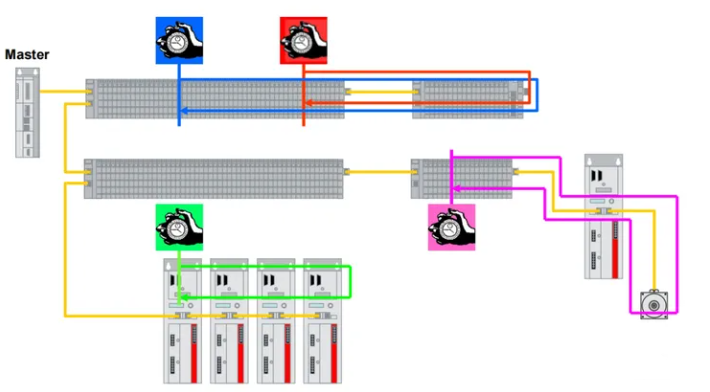
现场总线一般都是串行通信,到达各个从站肯定是有时差的,高铁再快,也不能同时到达上海和昆山。那么EtherCAT怎么保证从站统一行动,而没有掉队呢?答案就是分布式时钟。
EtherCAT主站会挑选第一个带时钟(DC)功能的从站作为时钟主站(DC Master),各从站按照时钟主站的时间统一步调。这样,如果多个电机做多轴插补的时候,就可以参考精准的时钟信号统一时间采样(采集命令数据),统一时间动作,就像这样:
ethercat和ethernet的区别
EtherCAT(Ethernet for Control Automation Technology)和Ethernet都是基于以太网技术的网络通信协议,但它们在实时性、通信方式和网络结构等方面存在一些区别。
1. 实时性:EtherCAT是一种实时通信协议,专门用于工业自动化应用,可以实现高速、实时的数据传输。它采用了分布式的主从结构,通过在数据帧里循环传递数据,从而实现了非常低的通信延迟。
Ethernet(以太网)在传统的形式下通常不是实时的,因为它采用了CSMA/CD(载波侦听多路访问/碰撞检测)协议来共享媒体,可能有较大的数据传输延迟。
2. 通信方式:EtherCAT的通信方式是主从结构,其中有一个EtherCAT主站控制多个EtherCAT从站设备。主站负责发送控制指令和接收数据,而从站设备负责执行控制指令和发送数据响应。
Ethernet通常采用点对点或者星型拓扑结构,在网络中的设备可以直接与对端进行通信,不需要像EtherCAT那样进行特殊的数据帧传递。
3. 网络结构:EtherCAT网络具有较低的网络占用率,因为数据帧会在主站和从站之间循环传递。EtherCAT从站设备可以通过在数据帧中附加数据实现扩展和多个设备的级联连接。
Ethernet网络是一个分布式网络,具有更为灵活和复杂的结构。它可以支持更多的设备连接和更大的网络范围。
EtherCAT在工业自动化领域更常用,特别适用于对实时性有严格要求的应用。Ethernet则更广泛应用于办公环境、家庭网络和普通的数据通信。尽管两者都基于以太网技术,但其在实时性、通信方式和应用场景上有明显的差异。
审核编辑:黄飞
-
工业控制通信协议的报文帧分别是什么样的?2024-01-19 0
-
Ethernet和EtherCAT两者有什么区别和联系?2024-04-12 0
-
i2c通信协议2020-03-06 0
-
通信协议的相关资料分享2021-12-24 0
-
如何实现基础通信协议的设计?2022-02-14 0
-
常见的工业以太网通信协议2022-11-18 0
-
Modbus通信协议教程2015-12-08 1314
-
SCPI通信协议2016-05-04 2331
-
详细剖析I2C和SPI通信协议的区别2018-01-03 27553
-
物联网通信协议的种类与其区别2021-06-25 2936
-
一个简单的基础通信协议的设计与实现2021-12-14 672
-
i2c和spi通信协议的概念与区别 I2C/SPI总线通信协议你搞懂没有2022-06-23 3017
-
BL124EC协议转换网关助力EtherCAT与Ethernet/IP的通信2023-10-08 245
-
M-BUS和modbus两种通信协议有哪些区别呢?2023-12-11 1284
-
Ethernet IP转EtherCAT网关的配置应用2024-01-03 284
全部0条评论

快来发表一下你的评论吧 !
