

步进电机控制器电路图分享
描述
什么是步进电机控制器?
步进电机控制器是一种能够发出均匀脉冲信号的电子产品,主要用于控制步进电机的运动。它发出的信号进入步进电机驱动器后,会由驱动器转换成步进电机所需要的强电流信号,带动步进电机运转。
步进电机控制器的工作原理是通过微处理器或微控制器,根据输入的脉冲信号,按照设定的步进角度和速度,输出相应的脉冲信号给步进电机驱动器,驱动器将脉冲信号转换成步进电机的角位移或直线位移,使电机按照设定的角度或距离进行转动或移动。
步进电机控制器在许多领域都有应用,例如:自动化生产线、机器人、机床、打印机、医疗设备、航空航天等。在这些领域中,步进电机控制器可以用于精确控制电机的转角、转速和方向,从而实现精确的位置控制和速度控制。同时,步进电机控制器还可以通过编程实现复杂的运动轨迹和自动化操作,提高了生产效率和设备的自动化程度。
接下来小编给大家分享一些步进电机控制器电路图,以及简单分析它们的工作原理。
步进电机控制器电路图分享
步进电机控制器电路图(1)
步进电机是一种无刷直流电机,它将单次旋转分为多个相等的步数。这些类型的电机广泛用于机器人技术和其他精确运动起着至关重要作用的应用。本电路教程演示了使用 IC 4070 和 IC 4013 构建和工作步进电机控制器。
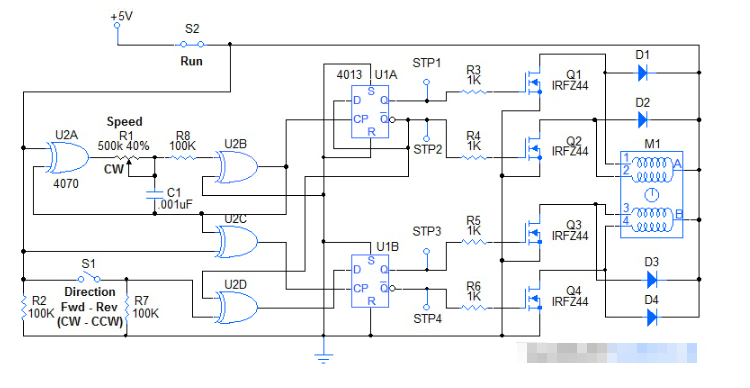
参考原理图,两个IC的U1A、B和U2A、B、C、D组成振荡器,以及驱动步进电机M1所需的正反转正交信号。具体来说,异或门U2A作为反相器接线,U2B作为缓冲器接线,与R1、C1和R8形成振荡电路。电阻器R8用于保护U2B的输入免受过高的过电压和过电流的影响。 C1和R1决定振荡器的频率。随着 R1 减小(变为 CW),频率增加,步进速率也增加。如果需要较慢的步进速率,可以根据需要增加 C1 的值。
U2B 连接到双触发器、U1A 时钟输入和 U2C。 U2C 作为反相器接线,为 U1B 提供反相时钟。 U1A 的 Qnot 输出连接到 U1A 的数据输入。因此,当U1A看到时钟的每个上升沿时,U1A的Q和Qnot的输出状态被切换(反转)。
开关 S1 连接到 R7 和异或门 U2D 的输入。当按下S1时,U2D作为反相器工作。当S1打开时,U2D充当缓冲器。 U1A 的 Qnot 输出连接到 U2D 的另一个输入。 U2D 的输出连接到 U1B 的数据输入。由于 U1B 的时钟输入与 U1A 的时钟输入互补,因此 U1B 的输出将在 U2A、B、C 时钟的相对边沿更新。由于 U2D 反转或只是缓冲 U1A 的 Qnot 输出。 U1B 的输出将超前或滞后 U1A 的输出 90 度,从而产生所需的正交输出。
电路的其余部分很简单。 R3-6 为驱动晶体管 Q1-4 提供电流。它们显示为 IRFZ44、n 沟道 MOSFET,但可以使用任何 n 沟道 MOSFET 或 BJT (NPN) 晶体管,前提是所使用的步进电机具有足够的增益和额定电流。 D1-4为驱动器提供反激保护,以释放步进电机线圈中的磁场能量。
步进电机控制器电路图(2)
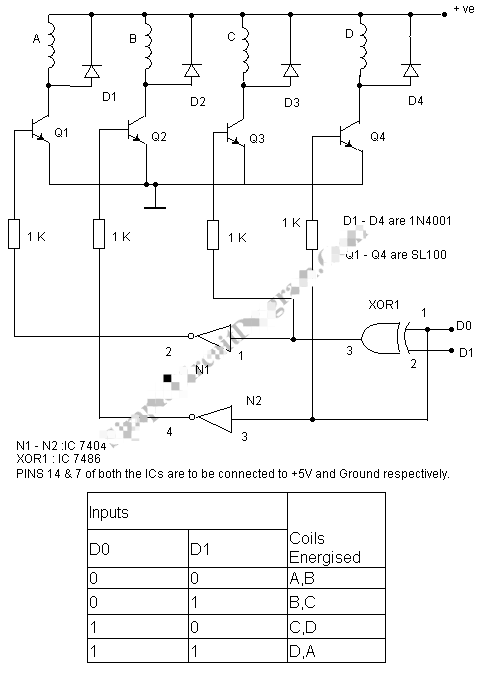
这是仅使用基本部件的简单步进电机控制器的电路图。驱动电路使用四个晶体管(SL100)驱动电机绕组,两个非门和一个异或门解码两位控制逻辑来驱动电机的四个绕组。二极管D1至D4保护相应的晶体管免受电机绕组切换期间产生的瞬变的影响。 d0 和 d1 是确定旋转方向和速度的控制逻辑。

该电路的控制逻辑可以从由555非稳态多谐振荡器提供时钟的2位向上/向下计数器获得。计数方向决定旋转方向,非稳态多谐振荡器的频率决定旋转速度。
如上图所示,IC1a IC1b 属于同一个 IC 7404。 IC1和IC2的引脚14和引脚7必须分别连接至+5V和地,尽管电路图中未示出。5V可以从基于7805的电源电路获得。
Vcc是步进电机所需的电压。它因电机而异。这里我们可以使用最高24V的步进电机。为了获得更高的工作电压和功率,必须将 SL100 晶体管替换为更高功率的晶体管,例如 2N3055。
步进电机控制器电路图(3)
步进电机是进行高精度运动控制的简单方法。步进电机的工作需要一个步进电机控制电路。步进电机控制器通常使用微控制器来完成复杂的任务。有些控制器使用步进电机IC来简化电路设计。对于简单的任务,例如以恒定速度旋转,可以使用分立元件构建简单的控制器电路。
最终的步进电机驱动器使用晶体管来驱动电机线圈。看一下表格,你会发现如果你想让这个步进驱动器移动电机,你需要一个2位自由运行计数器。如果您有一个可逆计数器电路,您将获得一个向上-向后步进电机控制。如果为每个 SL100 晶体管安装合适的散热器,该步进电机控制电路可提供高达 500 mA 的电流。通过在达林顿配置中使用 2N3055 晶体管和 SL100 晶体管,可以实现更高的电流。
-
互补步进电机控制电路图2009-04-09 885
-
液位控制器电路图2008-11-07 0
-
彩灯控制器电路图2008-11-08 0
-
新旭48V/500W有刷电机控制器电路图2008-11-08 0
-
24v无刷电机控制器电路图线路图2008-11-08 0
-
51单片机与TA8435联接控制步进电机电路图2011-09-08 0
-
请教一下,这个电路图是怎么控制步进电机旋转的?这是个信号放大图吗?2017-06-05 0
-
步进电机驱动器控制步进电机的电路问题2018-10-19 0
-
uln2803步进电机的控制原理电路图和源程序2008-08-28 10117
-
步进电机控制器电路 Stepper Motor Contro2010-02-05 2507
-
基于FPGA的步进电机控制器设计2010-02-09 2505
-
步进电机控制器原理_步进电机控制器编程实例2019-10-01 15943
-
步进电机控制器怎么使用2021-07-19 5546
-
步进电机控制器的应用设置2023-03-26 1247
-
步进电机控制器原理 步进电机控制器的应用设置2023-05-05 298
全部0条评论

快来发表一下你的评论吧 !
