

电动夹爪的运动控制方案
描述
夹爪的应用是机器人、机械手臂末端执行器,其稳定、高效、精准、科技化的特点,有效提高了各行各业生产效率,解决工业化精密运动控制的难题。电动夹爪通过电机、传动系统、减速器及夹爪控制系统组成,两端的夹爪可根据不同的夹持力,连续闭合和张开实际物体的夹取运动。
夹爪的原理
夹爪的开合运动的动力源,通常采用的是步进伺服、伺服电机和直流无刷电机,具有高响应的优势。其原理是通过控制器控制电机的传动、转速及方向,让夹爪夹取或者松开操作。可通过夹爪的位置、夹取速度及夹取的力度来实现夹爪的运动。
伺服电动夹爪控制
采用伺服电机传动的夹爪,具有高精度的优势。
1、位置控制
通过对伺服电机电流的位置闭环控制,控制夹爪在指定的位置上夹住物体。位置模式的闭环,可通过传感器检测夹爪的位置,然后计算出误差值,再发送信号让电机运动到精确的位置。
2、速度控制
通过对电机的转速来精确控制。一般是在特别的运行场合,已知物体的大小规格并且是一致的情况下,通过闭环控制速检测反馈,或开闭控制预设信号的方式,实现控制夹爪的运动速度。
3、扭矩(力矩)控制
通过夹取力度、夹取物体的力来控制夹爪的运动。闭环控制时通过传感器检测,或者开环控制下预设夹持力信号,实现夹取运动。
应用领域
1、工业自动化:工业自动化流水线生产多轴运动过程中,机械手臂末端夹爪的快速夹取及放置物体,提高效率及产能。
2、机器人:人工智能机器人模拟人工手部夹取物体运动,实现机器人仿人工自动化操作。
3、医疗领域:移液站移液设备,夹取液体运动,处理液体样品的精密运动。也常用在实验室、科研测试中。
4、大型物流仓储:快速搬动大型货物。
TMC精密运动控制方案
我们有整套电机结构和驱动模块调试效果。(如下视频)
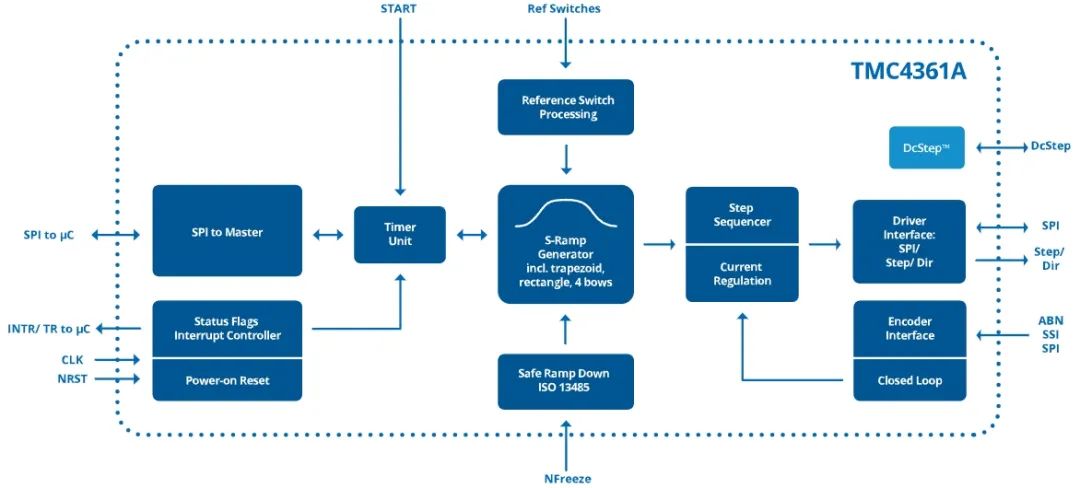
1、步进伺服方案:TMC4361是一种步进电机伺服控制器,内置闭环算法+电流控制,可实现电机的力矩环、速度环、位置环控制。步进伺服具备成本低、扭矩高等特点,也常用于夹爪的应用中。该驱动器内置斜坡(曲线加减速)发生器,具有S形斜坡、SixPoint (六点斜坡)运动控制,允许运动过程中切换,避免电机加速过程中抖动、损耗电机等。此外,TMC4361A 提供 SPI 和 Step/Dir,以及用于闭环操作的编码器接口。ChopSync(一种斩波模式),解决步进伺服低速运动的低频振动的问题。
Trinamic步进电机闭环驱动高性价比方案的选择:
01
TMC4361+TMC2130/TMC5130(小功率)
02
TMC4361+TMC2160/TMC5160/TMC2240(大功率)
2、伺服、直流无刷、空心杯及永磁同步电机方案:TMC4671是完全集成的伺服控制器,可为BLDC/PMSM和2相步进电机驱动以及DC电机和音圈提供磁场定向控制(FOC),所有控制功能均在硬件中实现。支持串口或者是CAN通信,通过TMCL-IDE上位机软件进行设定的模式。以力矩值为例,通过软件上传指令,如设定最小电流/电大电流,电机工作时它的电流会在这最大值与最小值之间,负载越大电流值越大,当我们需要力控制的时候,我们可以通过编码器反馈的值来进行设定一个合适的值,当外面的力达到所设定的值时,就会触发一个输出信号。
//
目前,我们有整套电机结构和驱动模块调试效果,欢迎各位工程师们前来体验。
-
汽车电子技术之防夹电动车窗2009-10-25 0
-
电动窗帘单片机方案-智能家居2018-12-19 0
-
Ameya360 运动控制模块解决方案2019-01-14 0
-
运动控制器与plc的区别2019-06-03 0
-
如何对永磁同步电动机的运动进行控制?2021-03-09 0
-
怎样去设计一种双后轮驱动电动汽车运动控制系统?2021-05-13 0
-
电动后尾门控制单元主要功能2021-08-26 0
-
运动控制器相关资料分享2021-09-07 0
-
运动控制的定义及原理2021-09-07 0
-
霍尔传感器和电流纹波技术在电动车窗防夹中的应用2021-12-28 0
-
电动夹爪运用在哪些行业?2022-05-17 0
-
运动控制系统的定义与机电系统运动控制教程分享2017-11-09 1086
-
电动机控制设计的运动控制装置2021-05-13 2221
-
智能制造的智能运动控制解决方案2022-08-03 2688
-
求一种电动夹爪的运动控制方案2024-02-22 228
全部0条评论

快来发表一下你的评论吧 !
