

嘈杂环境下评估机械臂动作识别性能的策略与方法
机器人
描述
作者:Elaheh Motamedi , Kian Behzad等
本文探讨了在嘈杂环境中利用机器学习技术进行机械臂动作识别的问题。通过使用视觉系统和深度学习模型,作者提出的方法在3x3网格环境中的井字棋游戏案例中得到验证。实验结果显示,尽管存在噪声和不确定性,作者的方法仍能够精确地检测关键点并分类机械臂的动作。这为在现实世界中具有挑战性嘈杂环境下的机器人动作识别提供了有益的洞见。
读者理解:
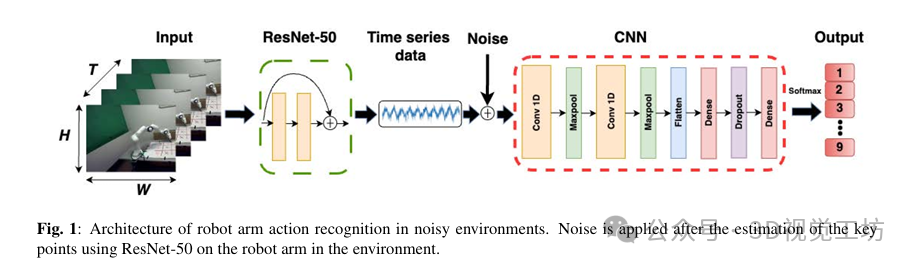
文章使用了预训练的ResNet-50进行机器人臂姿态识别,然后引入了CNN用于在嘈杂环境中进行机器人臂动作识别。该方法通过使用卷积神经网络(CNN)来提高模型在真实世界嘈杂环境中的鲁棒性。
总体而言,该研究在面对噪声和不确定性的挑战时,采用了一种相对综合的方法。通过结合深度学习模型和视觉系统,研究致力于提高机器人动作识别的性能,尤其是在实际场景中的复杂嘈杂环境下。
1 引言
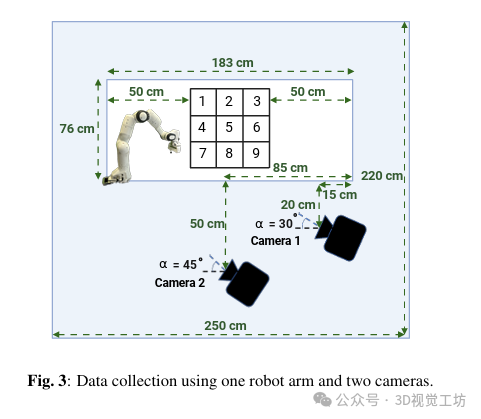
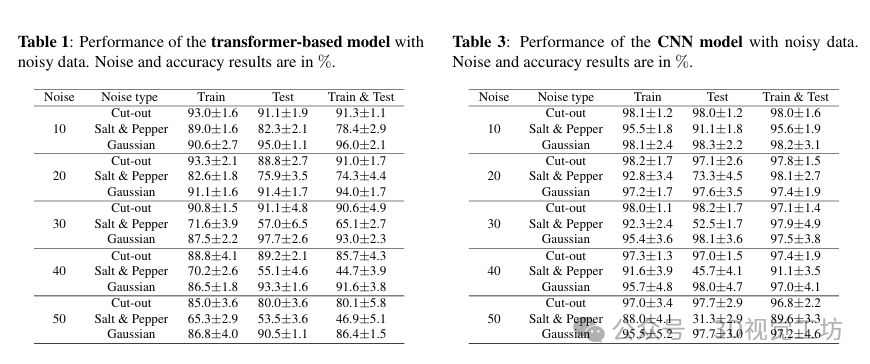
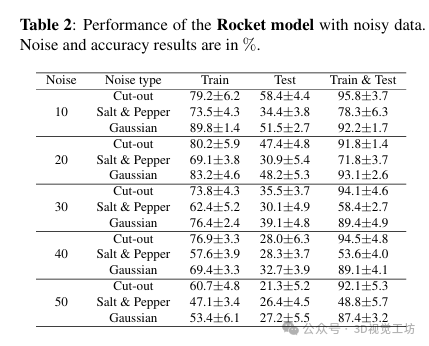
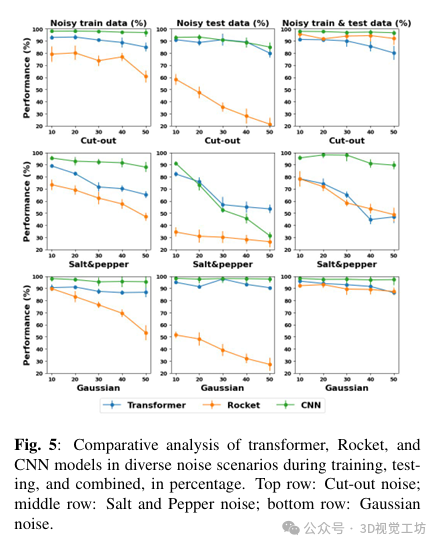
本文介绍了机器人系统中姿态估计的关键问题,特别是在嘈杂环境中准确确定机器人的空间方向。使用预训练的ResNet-50作为标准工具,提出了一种基于CNN的机器臂动作识别模型。该模型在嘈杂的时间序列中表现出色,与最新的Transformer和Rocket模型进行了比较。通过使用Franka Emika机器人臂进行实验数据集的收集,研究为在嘈杂环境中引入最小误差边界的机器臂动作识别模型做出了显著贡献。这项研究的洞见有望为在嘈杂环境中各种应用的更可靠机器人系统的开发提供信息。
2 方法
机器人臂姿态识别:
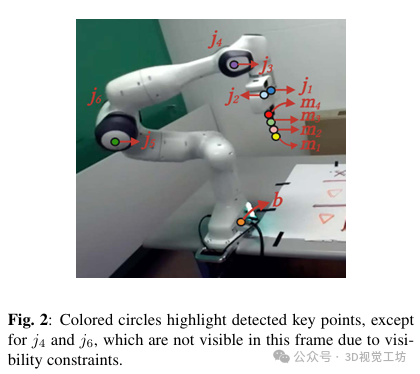
使用J台摄像机捕捉机器人臂的运动,每个摄像机j输出一个视频流V(j),具有长度T和帧大小H×W。对每个视频流采用预训练的ResNet-50进行处理,以估计机器人臂在X-Y平面上随时间的姿态,表示为A(j) ∈ RK×T,其中K是关键点的数量。该方法的优势在于其对有限标记帧的有效性,这得益于ResNet-50在ImageNet上的预训练。机器人臂动作识别:
ResNet-50模型对于每个摄像机j的输出A(j)代表机器人臂上关键点随时间演变的轨迹。考虑到嘈杂环境可能影响A(j),引入了一个CNN模型,该模型包含一个带有32个滤波器的1-D卷积层,以及一个带有64个滤波器的1-D卷积层,最后通过两个稠密层进行动作识别。该CNN模型针对9个可能的目标类别进行动作识别,这代表了井字棋游戏中不同位置的情况。这一系列方法的核心在于将预训练的ResNet-50用于机器人臂姿态识别,随后引入CNN用于在嘈杂环境中进行机器人臂动作识别。该方法通过一系列卷积和池化层,以及稠密层,实现了在嘈杂环境中对机器人臂动作的鲁棒识别。总体而言,这个方法为在具有挑战性的嘈杂环境下进行机器人动作识别提供了有效的解决方案。
3 总结
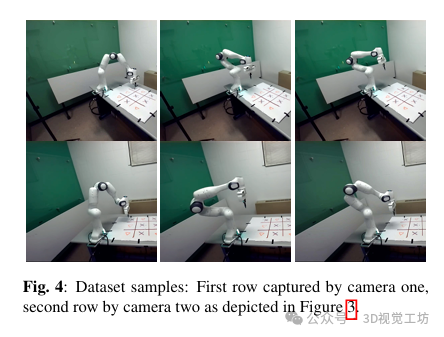
本研究聚焦于在嘈杂环境中基于视觉的机器人动作识别,通过实时、准确地进行机器人臂的二维姿态估计。与理想环境的研究不同,我们评估了在嘈杂环境中使用Transformer和Rocket等最新神经网络的性能。研究结果显示,该模型在各种嘈杂环境中对机器人臂动作识别具有鲁棒性。
审核编辑:黄飞
-
【国产FPGA+OMAPL138开发板体验】(原创)2.手把手玩转游戏机械臂2024-02-01 0
-
【OK210申请】基于A8的智能机械臂2015-07-22 0
-
【FireBLE申请】基于leapmotion的智能机械臂2015-08-08 0
-
开源工业增强型机械臂2015-10-23 0
-
【Pocket-RIO申请】采用labview与FPGA的多自由度机械臂快速控制系统原型开发2016-12-19 0
-
想做一个底盘加机械臂的移动机械臂,有感兴趣的或者给点建议的朋友吗?2017-04-26 0
-
做了一个移动机械臂,欢迎大家来一起学习探讨2017-04-28 0
-
【WisCore AVS套件申请】机械臂语音定位2017-05-24 0
-
#开箱体验#开源机械臂开箱2017-07-17 0
-
使用moveit控制真实机械臂的方法2019-05-21 0
-
头部动作识别系统的硬件设计2019-06-18 0
-
【瑞芯微RK1808计算棒试用申请】机械臂快速识别抓取系统2019-09-23 0
-
【瑞芯微RK1808计算棒试用体验】机械臂视觉快速识别2020-02-08 0
-
如何导入机械臂的三维模型2021-09-07 0
-
机械臂的控制学习2022-02-23 0
全部0条评论

快来发表一下你的评论吧 !
