

如何轻松看懂波特图
描述
波特图的主要功能是用来表示系统的频率特性,包括幅频特性和相频特性。假设有一个系统用于跟随正弦波,当输入一个正弦波时,输出也是一个正弦波,但是输入、输出在幅值和相位上是会有差异的,在时域如下图所示。
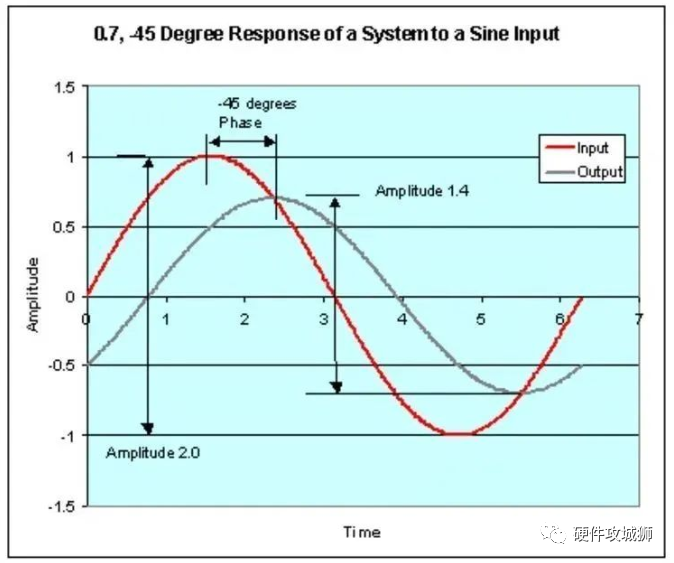
从上图可知在某一频率下该系统的幅值增益为20lg(1.4/2.0)=-3.1dB,相移(滞后角)为-45°(负数表示滞后)。当输入的频率不同,幅值增益和相相移也会变化,显然在时域上是很难表示系统在不同频率下的输出,在此引入了波特图,用于表示系统在不同频率下的特性,即幅值变化的比例和相移的程度。定义波特图的横坐标为频率,纵坐标为增益和相移并以对数的形式表示(对数能放大坐标)。我们改变输入信号的频率,并测出在不同频率下输出信号的幅值和相移,并计算进行坐标转换,就可绘制出如下的某一理想电机的开环和闭环波特图。
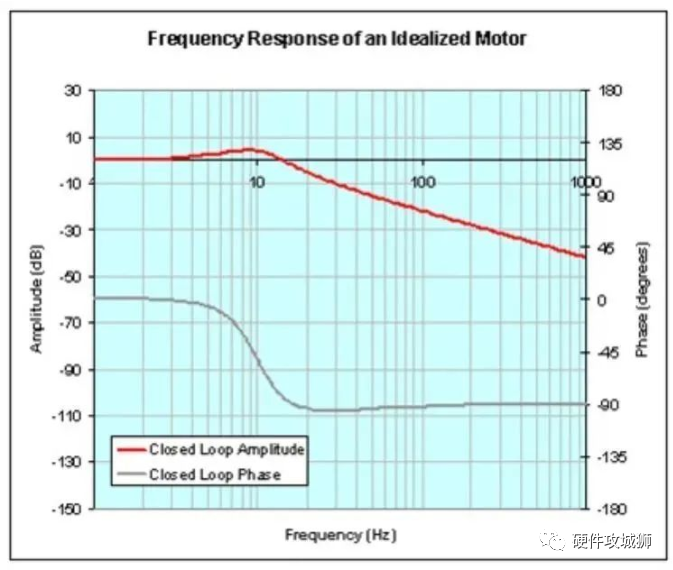
上图理想电机的波特图分为开环和闭环两个曲线,闭环系统是指输出信号反馈到输入端参与控制,从两根曲线可以读出不同的信息。通过开环系统的幅频曲线和相频曲线可以获得系统的幅值裕度和相位裕度来判断系统的稳定性。规定当输入某频率信号时幅值增益为0dB时,该频率下输出的相移角+180°为开环系统的相位裕度。下图所示的系统的相位裕度为180°+(-147°)=33°。规定当输入某频率信号,系统的输出相移为-180°(输出翻转)时,其输出幅值增益为系统的增益裕度(幅值裕度),下图的系统的幅值裕度为0-32.5dB=32.5dB
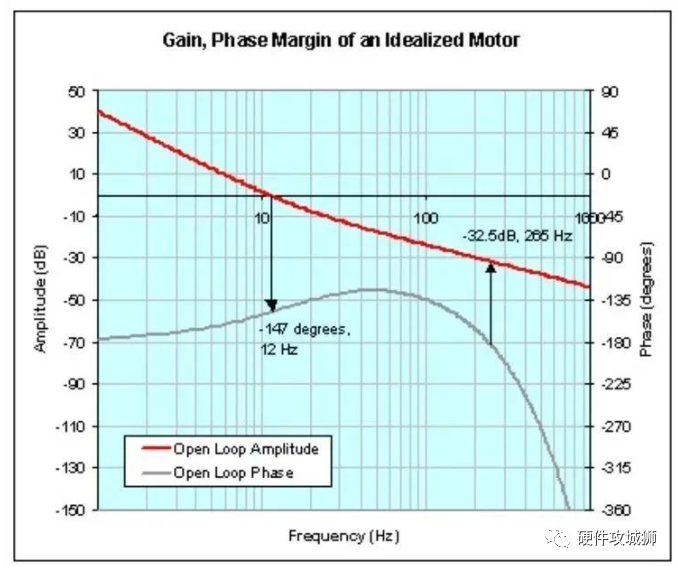
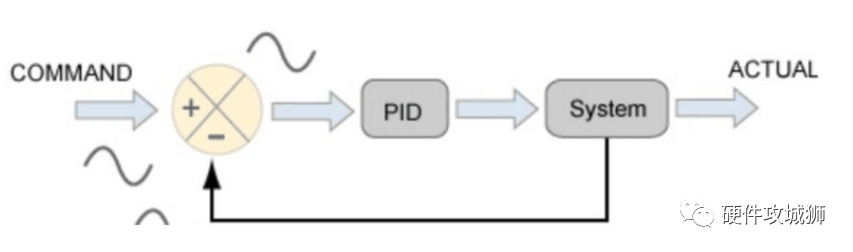
上图系统的幅值裕度为32.5dB,相位裕度为33dB,系统稳定。为了保证系统在闭环控制下能稳定,一般要求系统的相位裕度大于45°。当系统的幅值裕度为0,相位裕度为0就会发生自激振荡,在控制上是不稳定系统。下面分析增益为0dB,相移为-180°的系统的特性。如下图所示的PID控制系统,当系统在某一频率的开环增益为0dB,开环相移为-180°,引入反馈构成闭环控制。PID控制的输入量ERR=INPUT-OUTPUT,系统的开环输出相移为-180°,因为计算出来的误差值将翻倍,构成了一个正反馈系统,系统是不稳定的。
在调PID参数时候,不同参数下的系统阶跃响应如下图所示,可分为欠阻尼、过阻尼、临界阻尼系统。
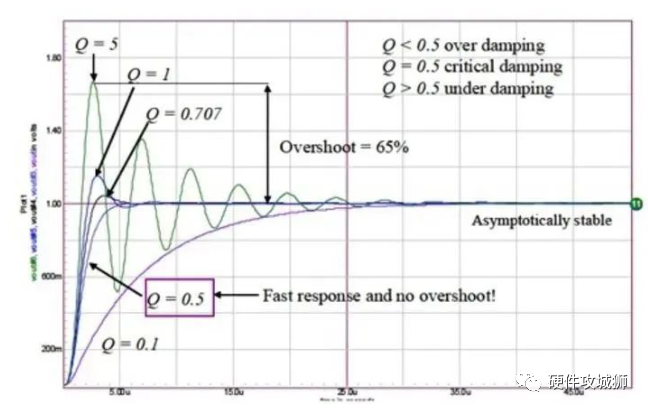
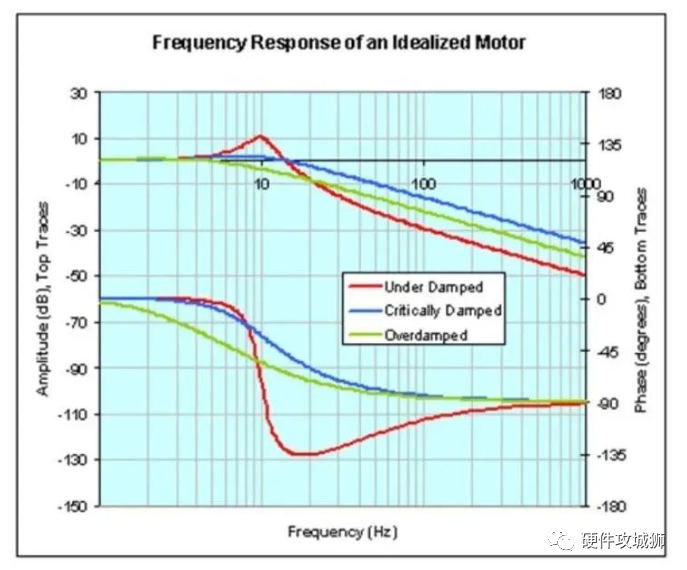
欠阻尼、过阻尼、临界阻尼系统的波特图如下图所示。
另外,根据系统的波特图也可以进行控制系统的校正,这是波特图最大的用途。
审核编辑:黄飞
全部0条评论

快来发表一下你的评论吧 !
