

嵌入式DSP C2000 电机电力控制专业实验室解决方案
描述
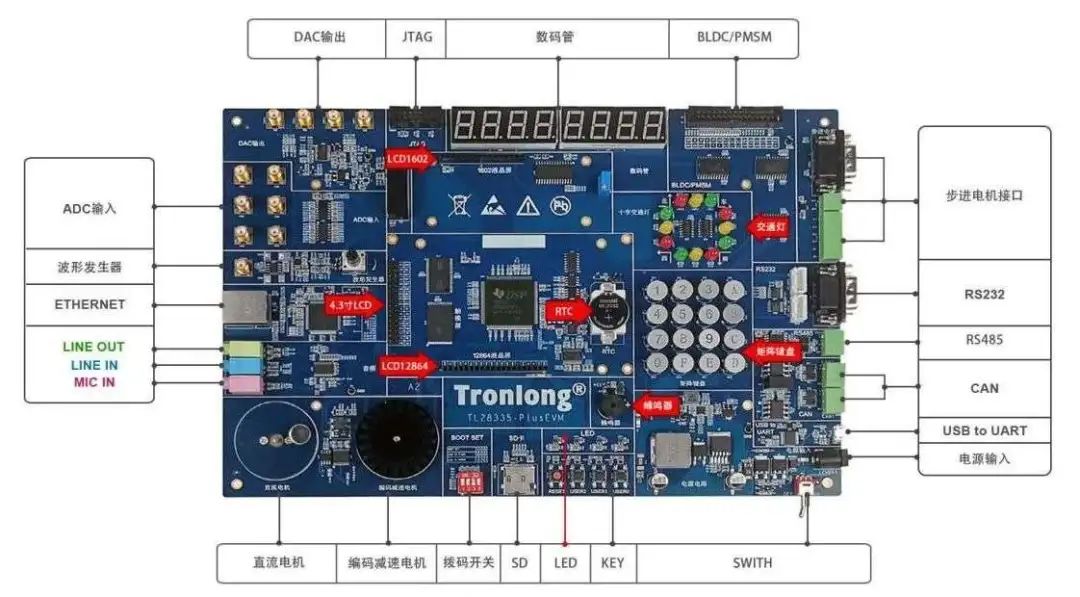
基于 TI DSP C2000 教学实验箱
实验箱基于TI TMS320F28335浮点DSP C28x控制器,主频150MHz,实验箱采用一体板结构,含实验板和DSP仿真器,可配置电机配件箱,包含步进电机、直流无刷电机(含电机驱动器)和永磁同步电机(含电机驱动器)。
实验箱适用于测控、自动化、工业控制、电力控制和电机控制等教学领域。
实验箱板载固定仿真器,金属材质,免驱动安装,支持防反插功能,实验底板上板载波形发生器,采用AD9833芯片,可输出三种波形:正弦波、方波、三角波,可通过旋钮控制输出范围为0~4.5V。实验板上支持安装可拆卸亚克力保护板,保护实验电路。

实验箱支持:CAN、RTC、以太网口、音频输入输出接口、AD、DA、RS232、RS485、LCD、蜂鸣器、直流有刷电机、减速电机、4*4 矩阵键盘、数码管、十字交通灯等外设与接口。
实验箱可配置电机配件箱,包含步进电机、直流无刷电机(含电机驱动器)和永磁同步电机(含电机驱动器)。



步进电机(可选)参数
相数 | 2 |
步距角 | 1.8° |
绝缘等级 | B |
额定电流 | 5A |
相电阻 | 0.39Ω |
相电感 | 1.7Mh |
静力矩 | 2N.m |
转子惯量 | 480g.平方厘米 |

BLDC无刷电机(可选)参数
相数 | 3 |
额定电压 | 24 VDC |
额定转矩 | 0.38N.m |
额定电流 | 5.9A |
空载电流 | 0.8A |
额定功率 | 100W |
额定转速 | 2500rpm |
空载转速 | 3500rpm |
级对数 | 8 |

PMSM永磁同步电机(可选)参数
相数 | 3 |
电压 | 24 VDC |
额定功率 | 62W |
额定转矩 | 0.2N.m |
额定电流 | 4.0A |
额定转速 | 3000rpm |
磁极 | 8 |
电阻 | 1.02Ω±10% |
电感 | 0.59mH±20% |
丨►
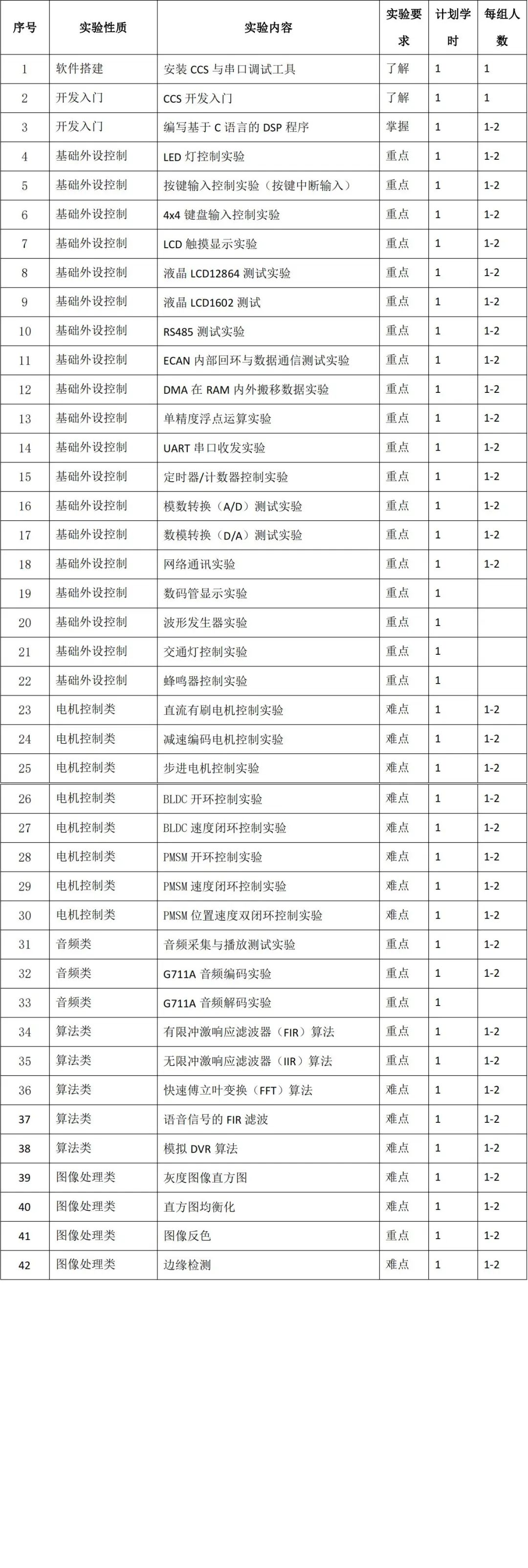
实验内容丰富,满足多场景教学需求
创龙教仪提供丰富的教学实验案例,让学生更全面地了解 DSP 电力控制、电机控制相关知识与应用,实验类别如下表:
第一章 | DSP实验环境搭建与CCS开发基础 |
第二章 | DSP基础外设实验 |
第三章 | 电机控制类实验 |
第四章 | 语音类实验 |
第五章 | DSP算法实验 |
第六章 | 图像类实验 |
丨►
保姆式实验操作教程,减少老师备课时间
创龙教仪提供保姆式实验操作教程,提供教学实验手册、教学实验视频,在明确重点知识的前提下,指导学生一步步操作,帮助快速打好专业基础,同时大大减少老师们的备课时间,减轻老师们的负担。手册内容如下表:
实验目的 | 帮助学生理解实验重点并掌握知识点运用。 |
实验原理 | 包含模块原理图、源码解析、现象原理等,帮助学生理解实验现象的实现方式。 |
实验设备 | 介绍实验所需的硬件设备、软件设备等,让学生提前做好实验准备,节约时间成本。 |
实验步骤 | 详细介绍实验操作步骤,包含源码编译、硬件连接、软件操作等,帮助学生快速上手。 |

向下滑动查看所有内容
这是一条分割线
丨►
案例分享:3-2 减速编码电机控制实验
一、实验目的:
(1) 理解PID控制原理。
(2) 学习增量式PID算法的原理。
(3) 掌握PID闭环控制电机的实现。
二、实验原理:
模拟PID控制原理
在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器。PID控制器原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单。
模拟PID控制系统的常规原理框图如下图所示。系统由模拟PID控制器和被控对象组成,r(t)是给定值,y(t)是系统的实际输出值,给定值与实际输出值构成控制偏差e(t)。
e(t)=r(t)-y(t)
控制偏差e(t)是PID控制的输入,u(t)是PID控制器的输出和被控对象的输入。模拟PID控制器的控制规律为

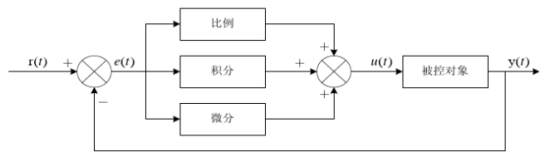
控制器的输出与输入误差信号成比例,当仅有比例控制时系统输出存在稳态误差。在模拟PID控制器中,比例控制的作用是对偏差瞬间做出反应。偏差产生后控制器立刻起控制作用,使偏差变小。比例系数Kp决定了控制作用的强弱,Kp越大,控制作用越强,过度越快,偏差也就越小。但是Kp越大,也更加容易产生振荡,破坏系统的稳定性。因此,比例系数Kp必须选择适当,才能使过渡时间变小,偏差小又稳定。
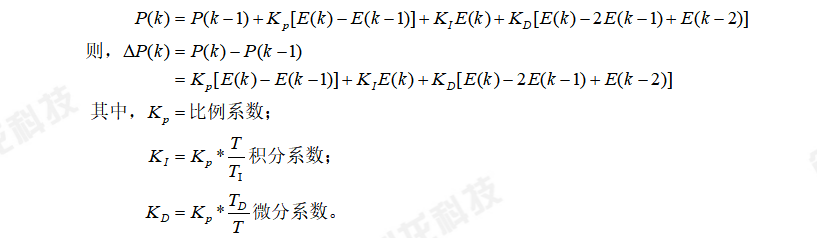
增量式PID算法
数字式PID控制算法可以分为位置式PID和增量式PID控制算法。在本实验中使用的增量式PID算法。增量式PID控制算法只需要计算控制量的增量。

可得控制器在第k-1个采样时刻的输出值为:
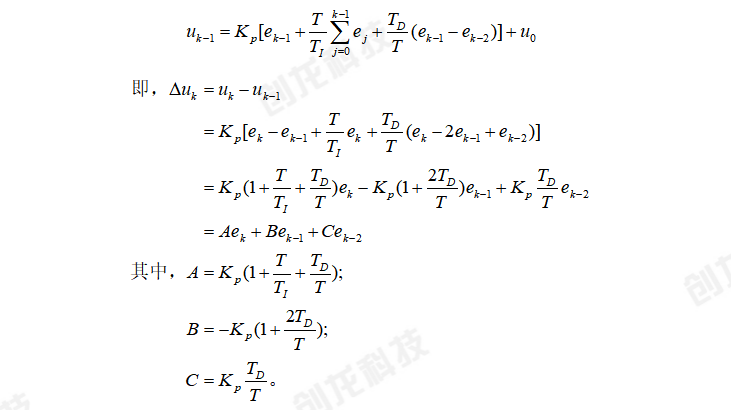
如果采用恒定的采样周期T,一旦确定了A、B、C,只要使用前后3次测量值的偏差,就可以求出控制增量。
除此之外,还有另一种算法:
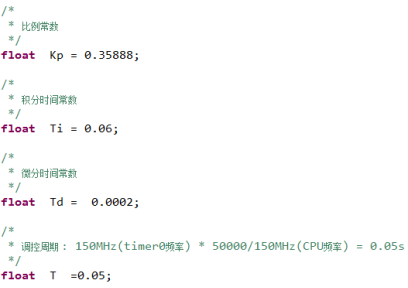
PID算法程序解析
打开光盘资料的"Demo\KingBox\Application\DC_GEAR_MOT\main.c"文件,可查看相关代码。比例常数、积分时间常数、微分时间常数和调控周期如下:
主函数中首先初始化系统控制,配置CPU主频、寄存器和初始化PIE控制等。调用InitMeasureSpeed函数初始化时钟、中断等。InitMeasureSpeed函数如下:
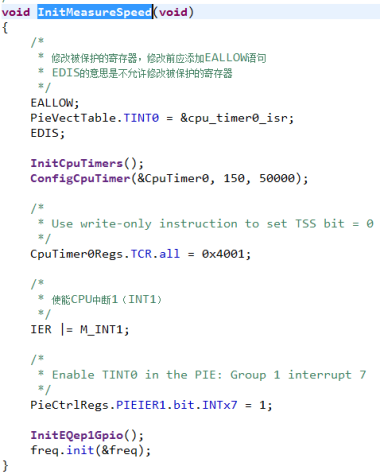
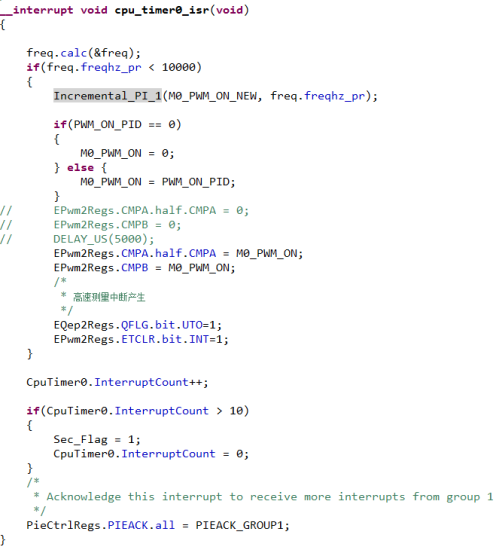
InitMeasureSpeed函数中,cpu_timer0_isr定时器中断函数中定时采集速度,并用于PID算法。freq.freqhz_pr为采集的电机脉冲数,M0_PWM_ON为高电平时间,M0_PWM_ON_NEW为新的高电平时间,PWM_ON_PID是经过PID算法后的高电平时间。cpu_timer0_isr定时器中断函数如下:
三、实验步骤
(1)对实验设备进行硬件部分连接,连接好仿真器和USB串口线(默认为USB to UART串口输出)并上电。
(2)右击计算机图标,点击“设备管理器->通用串行总线控制器”或者“设备->端口(COM和LPT)”,查看是否有对应的仿真器的选项出现,如有说明仿真器驱动已经正常安装,否则请先正确安装CCS。同时查看串口的端口号。
(3)打开串口软件并设置串口调试工具,波特率为115200。
(4)按照工程导入步骤导入光盘资料"Demo\KingBox\Application"路径下的DC_DEAR_MOT工程。
(5)编译工程生成DC_DEAR_MOT.out的可执行程序。
(6)实验箱上电,确认仿真文件(.ccxml 文件)配置,并连接CPU。
(7)加载DC_DEAR_MOT.out可执行程序,并运行程序,本实验的功能是实现PID闭环控制电机。
四、实验现象
运行程序之后,串口显示如下图所示:
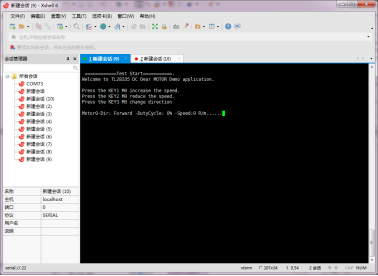
同时,数码管显示电机的转速和转向(0是转速,F代表顺时针转),如下:

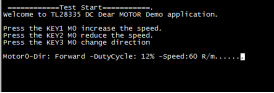
第一次按下按键1后,减速直流电机开始顺时针(Forward)转动,占空比(DutyCycle)约为12%,转速(Speed)约为60R/min,显示如下图所示:
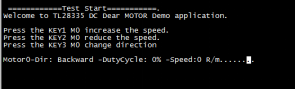
按下按键3后,电机会停止转动,同时串口打印电机转向为逆时针(Backward),电机转向由顺时针改为逆时针,如下:

-
#硬声创作季 #DSP DSP从入门到编写-02 如何学好C2000水管工 2022-10-25
-
#硬声创作季 #DSP DSP从入门到编写-06 C2000的中断机制-1水管工 2022-10-25
-
#硬声创作季 #DSP DSP从入门到编写-06 C2000的中断机制-2水管工 2022-10-25
-
TI DSP C2000电机控制专用教学实验箱:TL28335-PlusTEB #C2000 #嵌入式创龙教仪 2024-03-25
-
光载无线物联网实验室方案2011-08-22 0
-
实验室整体解决方案是什么?2014-08-11 0
-
【社区之星】学霸教你如何考进嵌入式国家实验室2014-10-08 0
-
求嵌入式系统如何快速入门,相关教材或者教程2014-10-09 0
-
三相刷式和步进电机控制解决方案2015-04-29 0
-
实验室lims系统解决方案2021-11-04 0
-
实验室嵌入式软件代码规范的相关资料分享2021-12-17 0
-
用于C2000™微控制器的EtherCAT从站堆栈解决方案2022-11-09 0
-
C2000 DSP实验箱实验指导用书2011-02-27 716
-
TI嵌入式产品研讨会:C2000™新能源车解决方案介绍2018-08-21 3193
-
TI嵌入式产品研讨会:C2000™数字电源解决方案介绍2018-08-21 4061
全部0条评论

快来发表一下你的评论吧 !
