

工业4.0中的机器人向协作机器人演进
描述
工业机器人出现在工业3.0的黎明,沿着计算机控制和自动化,并经过多年的发展,成为各种行业和过程的专业化。机器人是为大规模生产而设计的;它们通常是孤独的,在相对孤立的情况下完成特定的任务。随着工业4.0、网络物理系统和物联网(IoT)的出现,一些机器人演变成协作机器人,称为协作机器人。协作机器人与其环境(包括人和其他机器人)交互,并支持灵活制造和大规模定制(图1)。
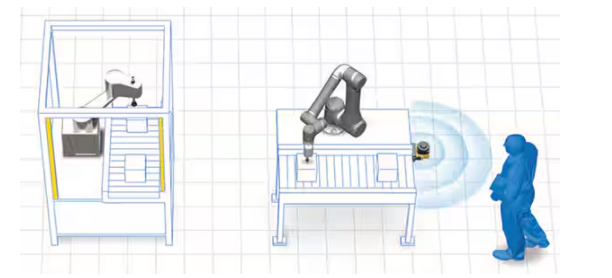
图1:传统的工业机器人(左)孤立地运行,而协作机器人(右)被设计为与其环境(包括人和其他机器人或机器)交互。(图片来源:Omron)
从机器人到协作机器人的进化路径包括许多适应:协作机器人的操作不同;它们的编程不同;它们往往更小,更简单,在某些情况下,移动的;与机器人相比,它们用于不同的过程,它们必须遵守不同的安全标准。协作机器人通常不会与机器人竞争或取代机器人;协作机器人扩大了采用自动化流程的机会。
本文追溯了机器人向协作机器人的演变:比较了机器人和协作机器人的不同操作方式;回顾了协作机器人使用的不同编程方法;讨论了人工智能(AI)、物联网和其他技术的使用,以实现协作机器人的移动性和与人的交互;详细介绍了cobots擅长的一些应用,如过程精加工操作,质量控制,物流/材料运输等;并审查了协作机器人的扩展安全标准。在整个过程中,它描绘了未来的网络物理操作的图景,这些操作将机器人、协作机器人和人融合在一起,以最大限度地提高生产力和质量,同时最大限度地降低总体成本。
协作机器人不仅可以与人一起工作,还可以从一个地方移动到另一个地方(图2)。这些特征对协作机器人编程、协作机器人使用的地点和时间以及协作机器人安全要求具有重要意义。

图2:协作机器人可以根据特定任务的需要从一个地方移动到另一个地方。(图片来源:Omron)
教学协作机器人
工业机器人使用C和C++等语言编程。协作机器人已经发展到使用各种无代码工具进行“教学”,如吊坠、平板电脑,甚至手动将协作机器人手臂从一点移动到另一点(图3)。采用不同的教学方法而不是传统的编程,使协作机器人能够更快地学习新任务,这在协作机器人从一个任务转移到另一个任务时非常重要。编程工业机器人所需的时间具有经济意义,因为它在高生产应用中使用相对较长的时间。另一方面,协作机器人需要快速学习新流程,以避免长时间昂贵的停机时间。机器操作员可以在不需要专业程序员帮助的情况下教授协作机器人特定的任务。诸如拾取和放置等任务,包括对结果的目视检查,可以在几分钟内教给协作机器人。

图3:协作机器人可以通过将手臂从一个位置移动到另一个位置来训练。操作员的右手放在一个高分辨率的摄像头上,协作机器人可以用它来查看它在哪里以及那个位置有什么。(图片来源:Omron)
人工智能加上机器视觉可以帮助改善协作机器人的学习和功能。智能协作机器人视觉系统提供了一系列功能,如对象识别和定位、条形码和图腾解释、模式匹配和颜色识别。视觉系统还可以通过手势引导协作机器人从一个位置到另一个位置,并教它一个新的过程。在其他情况下,机器操作员可以使用平板电脑上基于拖放流程图的系统快速有效地教授协作机器人(图4)。
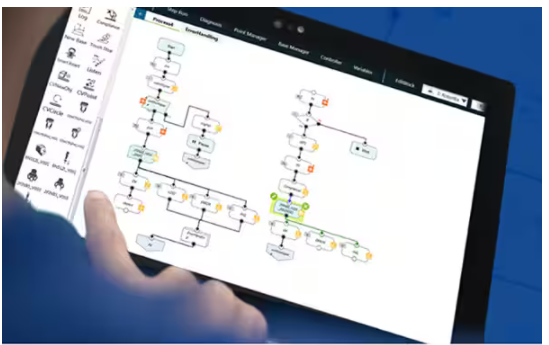
图4:直观的拖放示教/编程最大限度地提高协作机器人的生产力和灵活性。(图片来源:Omron)
除了与人合作,协作机器人还可以与自主移动的机器人(AMR)合作,从一个任务到另一个任务(图5)。AMR是专业的协作机器人,与人、协作机器人、机器人和机器协同工作,以出色的效率执行物料搬运等任务。与物料搬运一样,将协作机器人从一个地方移动到另一个地方并不是一项高技能的活动,因此适合AMR的实施。AMR通过将机载传感器和计算相结合来从一个地方导航到另一个地方,以了解其直接环境,并通过无线连接到整个设施中的集中计算资源和复杂的传感器网络,以帮助AMR了解计划路线上的障碍物的位置,并有效地绕过固定障碍物,如工作站,机架和机器人,以及可变障碍物,如叉车,其他AMR和人。

图5:一个机械手协作机器人(上)可以被一个自主的移动的机器人(下)拾取并移动到一个新的工作站。(图片来源:Omron)
协作机器人有什么用?
协作机器人与AMR、人、其他机器人和机器一起工作的能力为自动化开辟了新的机会。协作机器人在各种各样的行业和流程中用于大规模定制,例如装配操作,分配,螺丝驱动,机器维护,自动化,拾取和放置等,从汽车到食品加工和半导体制造等同样广泛的行业(图6)。
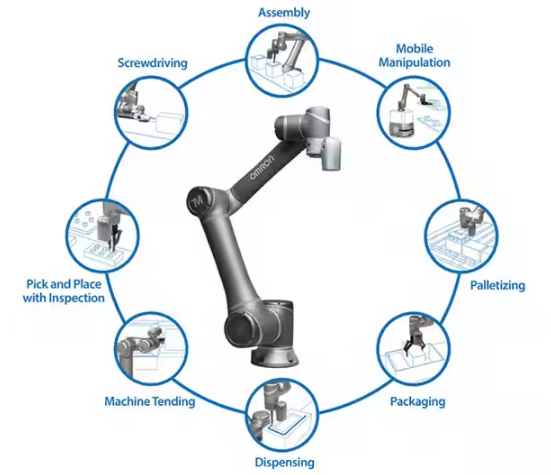
图6:协作机器人非常灵活,可以用于各种应用。(图片来源:Omron)
重复性或复杂的装配任务可以通过协作机器人与人一起工作来有效执行。如果与AMR配对,协作机器人可以改善复杂拣选操作的实施和将材料运送到工作现场。一旦材料被运送到生产线的末端,协作机器人就可以快速地将产品分类以便装运。使用机器视觉和人工智能,协作机器人可以检查、分类和从传送带上拾取成品零件,并将它们放入纸箱。协作机器人可以快速调整自己的行为,以适应新产品和季节变化。
协作机器人适用于各种制造过程,包括(如前所述)机器维护、螺丝驱动和点胶。数控机床、冲压和冲床、各种切割机和注塑站都是机器维护任务,协作机器人可以将人们从重复和潜在危险的活动中解脱出来。螺杆驱动协作机器人增加了精度和一致的扭矩,从而实现比手动装配更高的质量。可通过协作机器人以高精度分配各种材料,如胶水、密封剂、油漆和其他饰面。协作机器人末端执行器是可互换的,使协作机器人能够根据需要从一个任务移动到另一个任务(图7)。
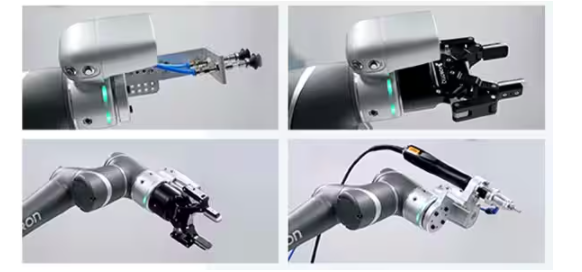
图7:Cobot末端执行器可以轻松切换以执行任何任务。这提供了切换到不同的生产要求的灵活性,最小的停机时间。前两个末端执行器包括一个用于基于AI的视觉系统的高分辨率相机。(图片来源:Omron)
检查成品零件或产品是具有机器视觉的协作机器人可以擅长的另一个领域。如果零件很复杂,彻底的检查可能需要来自各个角度的高分辨率图像,需要多个固定相机的协调。或者,具有单个摄像头的协作机器人可以识别被检测的部件,并相应地在部件周围移动,捕获完整视觉检测所需的所有图像。
协作机器人安全性的发展
协作机器人的安全考虑也在沿着发展。与工业机器人相比,协作机器人的安全要求更为复杂。由协作机器人和人组成的团队可以将机器人的重复性能与人的个人技能和灵活性联合收割机结合起来。协作机器人(和机器人)精通需要精确度、耐力和力量的任务,而人类则精通解决不精确的情况和可变的问题。结合这些互补的技能组合带来了与人和协作机器人之间的安全交互相关的挑战。
工业机器人的安全标准通常基于在机器人活动时将操作员排除在工作空间之外。Cobot安全预期与人的互动。Cobot的速度、扭矩和力限制是定义安全标准,包括紧急停止和保护停止。
合作机器人的紧急停止是操作员发起的;它停止所有合作机器人的运动并从合作机器人中移除动力。从紧急停止中恢复需要重新启动。当人进入协作机器人周围的保护空间时,保护停止自动发生(图8)。在保护性停止期间,协作机器人仍然通电。此外,在保护性停止期间,协作机器人运动编码器被监测用于意外运动。如果检测到意外运动,则断电。
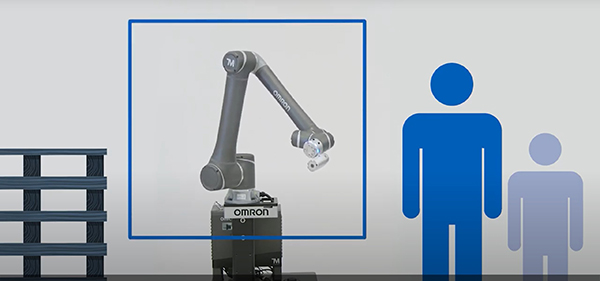
图8:协作机器人周围的腕关节安全空间(蓝色框)可以是矩形或圆柱形,并定义了一个禁区。如果在协作机器人旁边工作的人进入禁区,协作机器人会启动保护性停止。(图片来源:Omron)
一些协作机器人设计有两种操作速度设置,一种用于最大性能,另一种用于最大安全性。在性能设置中,假设没有人会进入合作机器人的保护空间,合作机器人将以最高的生产率高速运行。如果有人进入受保护的空间,协作机器人会自动进入人机协作设置,以降低速度、扭矩和力,实现最大的安全性。
关于协作机器人的安全性,有几个不断发展的标准和指南。ISO技术标准15066:2016和RIA技术报告15.606-2016都描述了用于降低人类工人风险的四种协作技术:安全级监视器停止、手引导、速度和分离监视以及动力限制(PFL)系统。TS 15066是规范性的,详细说明了符合标准所需的步骤。TS 15.606是信息性的,提供了可用于标准合规性的信息和方法。
RIA TR R15.806-2018描述了一种用于测试PFL系统施加的力的方法。传感器系统需要符合与速度和分离监测相关的标准。对于PFL系统和安全级监控站,要求在禁区内进行安全保护。
ISO 13855:2010建立了关于协作机器人接近人体特定部位的速度的防护措施的定位。它提供了一种方法来确定从探测区/禁区或启动保障装置到危险区的最小距离。
总结
协作是工业4.0和网络物理系统的标志,协作机器人是推动更高水平协作的关键参与者。协作机器人不断发展,使其更容易,更安全,更灵活地使用。协作机器人教学工具和人工智能的进步使得使用协作机器人更加直观。协作机器人不断发展的人机界面(HMI)提高了大规模定制生产的生产率和质量。协作机器人并没有取代机器人;协作机器人正在扩大自动化的机会,机器人、协作机器人和人之间的界限越来越不固定。随着协作机器人变得越来越像同事,而不像工业机器人,协作机器人安全标准正在扩大,并变得越来越重要,以确保安全地实现协作机器人-人类协作的生产力承诺。
审核编辑 黄宇
-
什么是工业机器人2015-01-19 0
-
工业机器人经典好书籍——《工业机器人》2015-02-03 0
-
工业机器人未来展望2015-02-11 0
-
工业机器人的四大核心部件2015-02-12 0
-
华南机器人应用培训中心工业机器人培训班招生2015-09-02 0
-
工业机器人应用广泛2017-09-07 0
-
机器人VS人:替代还是协作?2018-09-20 0
-
协作机器人伺服和传感器核心器件揭秘2018-10-12 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
工业机器人的技术原理2018-11-23 0
-
“协作机器人”如何快速处理传感器数据2020-08-05 0
-
协作型机器人的应用类型2020-12-01 0
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 0
-
关于工业机器人的知识汇总2021-10-11 0
-
PDF——工业机器人技术及应用2022-10-16 0
全部0条评论

快来发表一下你的评论吧 !
