
资料下载


基于单片机的智能遥控机器人软件设计
907619703
分享资料个
基于单片机的智能遥控机器人软件设计
1.1 主体设计思想及原理
设计主要目的是使智能遥控机器人实现红外遥控及循迹行走的功能。使用红外遥控发射器发射红外遥控信号,红外接收头接收并编译信号后传送给单片机,单片机安照设定程序控制智能机器人按照遥控的指令运行。红外遥控具有前进、后退、左转、右转、停止、循迹六种指令。
当红外遥控智能机器人按照遥控指令进入循迹模式时,它能在设定的白底黑线道路上识别黑线并按照黑线的路径行走转弯。设计采用红外发射、接收器对黑白环境进行检测,红外检测信号通过端口传送给单片机,运用单片机的运算和处理能力对小车进行相应的控制,并通过蜂鸣器及数码管显示当前智能遥控机器人所处模式。
智能机器人还配备有光敏元件,用于判断当前环境光线的强弱,控制小车前方LED灯的开关。
1.2 总体设计方案
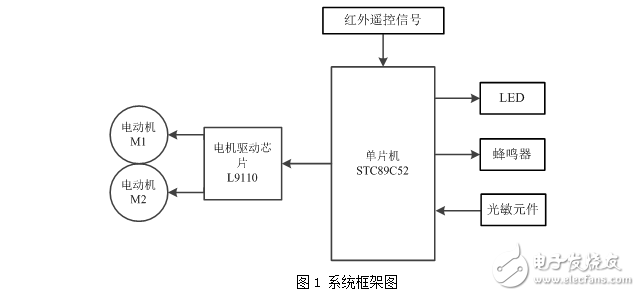
智能循迹机器人主要循迹功能的实现是通过车辆前方安装的两对红外发射和接收探头完成的。根据光反射原理,当红外发射探头发射红外光遇到物体时,就会形成反射光线,而反射光线被红外接收探头接收,接收到的信号就会送至单片机,并由单片机通过内部程序判断智能机器人所处模式,控制电机正反转,以完成小车的前进、后退及转弯动作。通过单片机的控制,智能遥控机器人能按照设定的路线行走。系统框架图如图1所示。
2 系统主要功能模块
2.1 STC89C52单片机
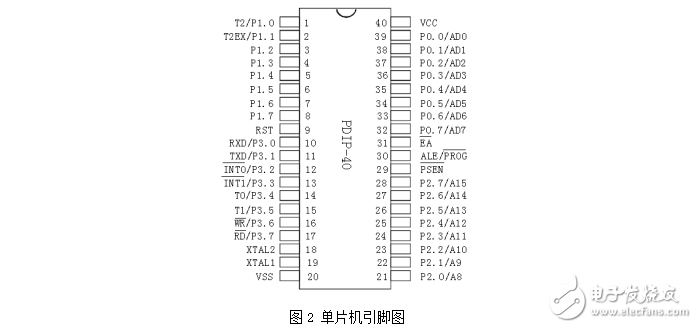
STC89C52RC单片机是STC推出的新一代高速、低耗能、超强抗干扰的单片机,指令代码完全兼容传统的8051单片机,并由12时钟机器周期和6时钟机器周期可以选择。STC89C52使用经典的MCS-51内核,拥有灵巧的8位CPU和系统可编程Flash,使得STC89C52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。具有8k字节程序存储器,512字节数据存储器,32位I/O口线,看门狗定时器,内置4KBEEPROM,MAX810复位电路,3个16位定时器/计数器,4个外部中断,一个7向量4级中断结构,全双工串行口。空闲模式下,CPU停止工作,允许RAM、定时器/计数器、串口、中断继续工作。掉电保护方式下,RAM内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬件复位为止。最高运作频率35MHz [2]。单片机引脚图如图2所示。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






