

带PC机串口通讯的机器人控制系统电路设计
嵌入式类电子电路图
48人已加入
描述
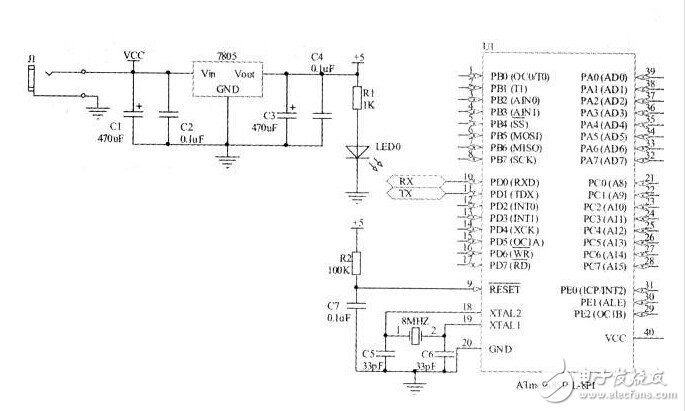
用AVRmega8515作一个带PC机串口通讯的最小单片机机器人控制系统,电路图见下图。使用时用WINDOWS自带的超级终端,把速率调整到9600,8个数据位.1个停止位,无奇偶效验,无流量控制(握手协议Xon/Xoff).接上串口线,按照屏幕提示输入数据就可以直观地控制3台舵机的旋转角度。
以下介绍一款24路机器人专用控制器。其主要是供不熟悉单片机的读者来使用。该系统整体硬件基本和上述最小单片机控制系统一样,还增加了一片采用I2C 总线通讯方式的24C256 EEPROM存储器,用来记录24路庞大的动作表,主控单片机也是AVRmega 8515.整个动作编程通过PC机串口终端仿真器来实现的。可同时控制24台舵机,并且能分别对台舵机进行速度控制,其中可以插入循环、延时指令。该控制器能让制作者从繁琐的单片机编程中解放出来,并且能让有PC机编程能力的读者进行二次开发。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
LabVIEW的六轴工业机器人运动控制系统2023-12-21 0
-
工业机器人上用的控制控制系统有哪些厂商呀?2015-01-23 0
-
嵌入式系统在机器人中的应用2018-07-06 0
-
工业机器人的技术原理2018-11-23 0
-
如何利用ARM研究嵌入式服务机器人控制器?2019-07-30 0
-
嵌入式服务机器人控制系统能实现什么功能?2019-10-15 0
-
基于CAN总线和双传感器仿人机器人运动控制系统的研究2020-08-19 0
-
有关机器人控制系统的基本知识都总结好了2021-06-30 0
-
关于机器人控制系统的这几方面知识你必须掌握2021-07-05 0
-
机器人系统与控制需求简介2021-09-08 0
-
机器人的控制系统2021-09-13 0
-
什么是机器人控制系统2021-10-11 0
-
怎样去设计一个舞蹈机器人步进机2021-12-10 0
-
如何使用树莓派开发智能机器人控制系统2021-12-23 0
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 0
全部0条评论

快来发表一下你的评论吧 !
