
资料下载


飞思卡尔杯全国大学生智能车竞赛杭州电子科技大学报告
John
分享资料个
飞思卡尔杯全国大学生智能车竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,涵盖了机械、模式识别、电子、电气、传感技术、计算机、自动化控制、汽车理论等多方面知识,从一定程度上反映了当代大学生综合运用所学知识和探索创新的精神。我们积极组队参加第十一届“恩智浦” 杯 全国大学生智能车比赛。前期我们花了大量的时间去思考智能车的架法,选择合适的加速度计和陀螺仪,硬件方案的实验,大体上确定了车模的机械架法和硬件上的芯片选型, PCB 布局等。中期是以软件调试为主,当然这段时期硬件上也做了合理的调整,特别是在机械上我们花了很多心思,实践证明在机械上的优化对智能车有很大的推动作用。后期软件算法已经确定,硬件上也很稳定,所以我们在原先的机械思路上更近一步,将电池放低以降低重心,实践证明低重心的智能车确实过弯比以前快很多。正是这种对智能车精益求精的追求,使得我们的智能车有了明显的提速。在本文报告内容框架安排上,第一章是引言,主要对车模设计和报告的架构进行了概述;第二章是系统硬件电路的设计,详细介绍了电源部分、电机驱动等 电路模块的设计思路及方案。第三章是机械架构调整,着重分析了加速度计和陀螺仪的新式架法和电池的驾法,同时也对小车机械的整体布局和架车理念做 了细致的解释和说明。第四章是软件系统设计,主要介绍了平衡的处理,图像处理,速度控制的模块编写和整体的模块调试。第五章是开发智能车调试过程的说明,讲述了我们自己在调车训练时的方法和训练工具。第六章为车模的技
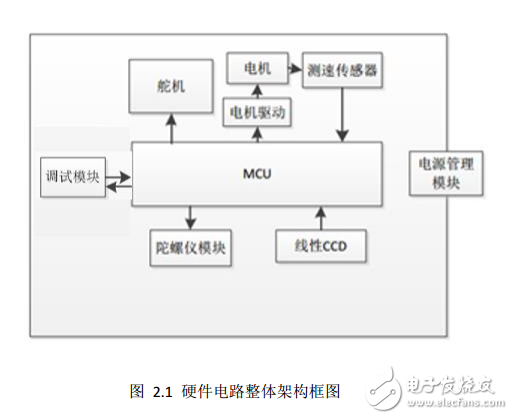
第二章 系统硬件电路设计 2.1. 硬件电路整体架构框图我们的智能车硬件系统主要包括以下模块: 电源管理模块、 线性 CCD、 电机驱动模块及测速模块、电源管理模块、 MK60DN512ZVLL10 电路。智能车硬件电路整体结构框图,如图 2.1 所示。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







