
资料下载


控制系统设计案例及实时系统体系结构的发展
分享资料个
关键字:电机控制 以太网接口 永磁同步电机 PMSM
怎样才能把多个 CPU 内核、硬件加速器块以及 10G 以太网接口结合起来控制一个电机呢?对于采用 1 美元微控制器 (MCU) 来运行电机的设计人员而言,这一问题太荒谬了。答案可能来自令人感兴趣的控制系统设计案例,实时系统体系结构的发展等。
起点
让我们介绍一种在我们应用场景中处于中心位置的永磁同步电机,即 PMSM。PMSM 有很多种外形和体积,适合很多种应用,从开关门到机器人手术工具关节等。在这一领域中,它得到了广泛的应用,这是因为其固有的可靠性、低成本,在我们的应用中,经过适当的控制,可以实现高精度和高效率。实际上,应用的要求越来越高,PMSM 支
持您降低机电设计的复杂性,在软件中实现复杂的功能。
PMSM 机械和电气特性非常简单(图 1) 。转子正如其名称所示,是永磁体。通常有三个定子绕组,在电机中均匀的
120 度角分布。真正的诀窍在于绕组的不同:转动密度是围绕定子呈正弦分布,因此,绕组实际上在边缘上相互重
叠。在绕组合适的相位上应用正弦电流,您能够建立与转子场角度垂直的旋转磁场,从而在转子上高效的产生扭矩。
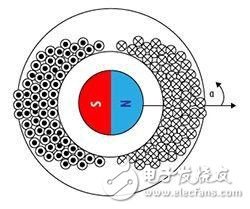
图 1. PMSM 截面
控制 PMSM 并不是高科技。一个简单的 MCU 使用查找表和插值来生成所需的驱动电流时变正弦信号,为绕组提供电流。如果算法正确,绕组会产生电机旋转磁场,转子随之转动。虽然起步有些复杂,但毕竟完成任务了,对吧?不完全是这样。
现场定位控制
开环控制的问题总是很复杂。启动电机,特别是有负载的情况,会比较难,效率也不高。开环控制器的响应并不能很好的适应负载扭矩或者速度命令的变化,无法抑制振动。出于通常的考虑,反馈控制系统工作起来会更好一些。
问题是要控制什么。很明显,我希望控制转动角度,在某些应用中,旋转速度。我们必须通过控制产生旋转磁场的三个绕组电流来完成这一工作。对此最好的方法是,在业界已经应用的多路步进,即,线程定位控制 (FOC) (图 2) 。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





