
资料下载


可预测追踪技术工作原理及作用及在VR/AR头盔上的应用
分享资料个
在虚拟现实和增强现实系统环境中,可预测追踪技术能够对某个对象或身体某一部位的下一步方向和(或)位置进行预测处理。给你举个例子,当你的头部朝着某个方向转动时,可以同步来预测你的手可能放置的位置。
为什么可预测追踪技术如此有用?
可预测追踪技术的一个常见应用,就是减少“运动光子”延迟时间,所谓运动的光子延迟是指用户在虚拟现实或增强现实环境下完成一个动作,到该动作被充分反映在显示屏上的时间。由于运动本身就会产生一些延迟,而当运动完成、信息展现在屏幕上时又会出现一段时延(更多引起时延的原因请参见下文),因此当你能够预测下一步方向和位置,然后将相关数据优先更新到屏幕上,就可以大大缩短感知延迟。
虽然在虚拟现实应用中,对于可预测追踪技术的关注比较多,但其实该技术在增强现实领域里也同样非常重要,特别是当用户在真实世界中发生瞬时移动,相应的增强现实叠加也要在显示屏上体现出来。举个例子,如果你带着一个增强现实头盔,看到增强显示的图形叠加在实体对象的顶部,更重要的是,即使你旋转了自己的头库,增强现实环境中的“覆盖物”需要依然“锁定”在原来的那个对象上,而不是随着你的头部转动而转动,它其实展示的是真实世界的一部分。对象或许可以被摄像头识别,但是摄像头可能需要耗费一些时间来捕获帧,以便处理器能够判断出这个对象在帧中的位置,然后图形处理芯片需要再呈现叠加层上的新位置。而通过使用可预测追踪技术,相比于现实世界,在叠加层中运动处理能够有所减少。
可预测追踪技术如何工作?
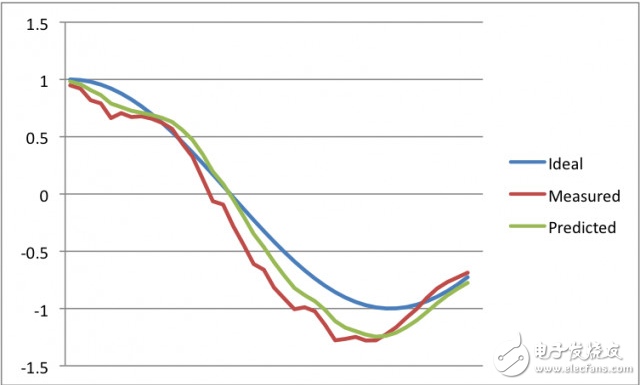
如果你看到一辆汽车正在以恒定的速度行驶,然后你想要预测这辆汽车在下一秒后可能达到的位置似乎是一件非常简单的事情,而且不出意外的话,预测的准确度也会很高——因为你不但知道这辆汽车的准确位置,而且还知道它当前的(或是估算的)行驶速度,所以有了这些条件之后,基本就能推断出这辆汽车未来所处的位置在哪里。
当然,如果你要预测这辆汽车在一秒钟时间内到底能开到哪儿,那么这个预测可能无法做到每次都百分之百准确,因为在这段时间里,汽车可能会改变方向,也有可能会加速。因此对于汽车行驶预测而言,你尝试预测的范围越远,预测的就会更不准确。简单的说,如果让你预测汽车在一秒钟时间之后所在的位置,准确度肯定比让你预测汽车在一分钟时间之后所在的位置要高。
此外,你对汽车本身情况了解的越多,那么预测准确的机会也就越大。比如,你不仅要测量汽车的速度,还要测量它的加速度,继而进行更准确的预测。
所以,假如你能够获得被追踪物体对象更多的行为信息,那么也可以提高预测准确度。在举例说明,当你进行头部追踪时,如果能够了解头部旋转的速度、以及可能旋转的角度,那么就能进一步优化追踪模型,从而做出更准确的判断。同样地,假如你正在进行眼球追踪,那么也可以将获取到的眼球追踪信息用于预测头部运动(这会在本文后详细探讨)。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





